Изобретение относится к измерительной технике, может быть использовано для измерения линейных перемещений и является усовершенствованием изобретения по авт. св. № 1180676
Цель изобретения - повышение точности преобразования перемещений путем уменьшения влияния перекосов подвижного электрода преобразователя.
На чертеже представлен преобразователь линейных перемещений в частотный электрический сигнал, общий вид.
Преобразователь содержит первый плоский резистивный элемент 1, распоЬоженный параллельно ему в той же плоскости неподвижный электрод 2, вы- полненный в виде пластины длиной, равной длине первого резистивного элемента 1, и подвижный электрод 3, выпол- ненный в виде протяженной пластины, расположенной с зазором относительно первого резистивного элемента 1 и неподвижного электрода 2. По другую сторону подвижного электрода 3 парал- лельно первому резистивному элементу 1 размещен идентичный ему по размерам и электрическому сопротивлению второй резистивный элемент 4, подключенный к первому резистивному элементу 1 па- раллельно. Подвижный электрод 3 размещен на изоляционном основании (не показано), связываемом в процессе измерений с объектом контроля (не показан) . Клеммами 5-7 резистивные элементы 1 и 4 и неподвижный электрод 2 подключаются к пороговому элементу и блоку подавления помехи (не показаны).
Преобразователь работает следующим образом,
При перемещении объекта контроля подвижный электрод 3 смещается вдоль резистивных элементов 1 и 4 и неподвижного электрода 2 в направлении X. При этом пропорционально перемещению изменяется величина сопротивления между клеммами 5 и 6, а следовательно, частота выходного электрического сигнала на выходе преобразователя, по которой судят о контролируемом линейном перемещении объекта. На перемещения объекта в направлении, пер
пендикулярном X, преобразователь не реагирует.
Если в процессе измерений наблюдаются перекос подвижного электрода 3 относительно его продольной оси, а также изменения зазоров между ним и резистивными элементами 1 и 4, то в результатах измерения сопротивления появляется ошибка, величина которой может быть рассчитана по формуле
4Х
у. 3
d,
.
характеризует смещение у подвижного электрода 3 в зазоре (УО - полуширина зазора)i
5 05 о
5
5
0
dtg 2у.
характеризует перекос относительно продольной оси электродаj
d - ширина подвижного электрода i 0 - угол его наклона (перекос).
При перекос подвижного электрода не влияет на точность измерений, так как ошибки, возникакщие на резистивных элементах 1 и 4 полностью компенсируют друг друга. При влияние перекоса существенно уменьшено, так как ошибка от перекоса является величиной второго порядка малости.
Таким образом, преобразователь имеет повьш1енную точность, что обусловлено исключением влияния перекоса подвижного токосъемного электрода относительно резистивных элементов преобразователя.
Формулаизобретения
Преобразователь линейных перемещений в частотный сигнал по авт. св. № 180676, отличающийся тем, что, с целью повьш ения точности путем уменьшения влияния перекосов подвижного электрода, он снабжен вторым резистивным элементом, подключенным параллельно первому и размещенным параллельно ему по другую сторону от подвижного электрода.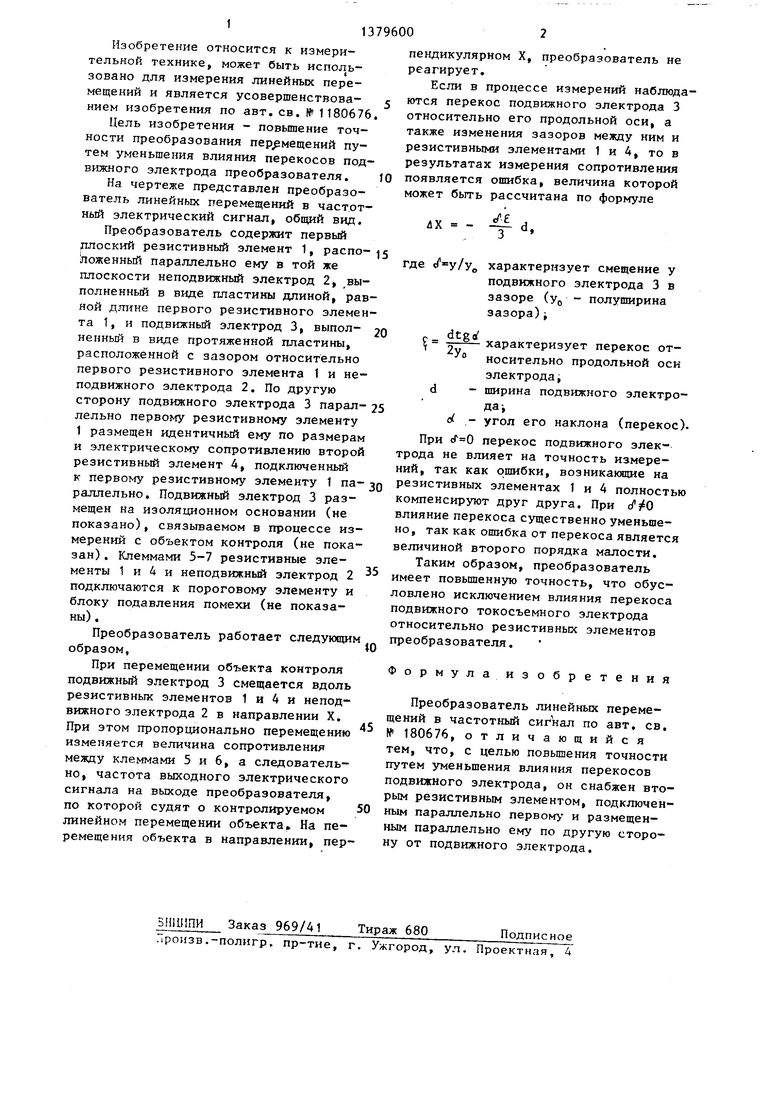
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь линейных перемещений в частотный сигнал | 1984 |
|
SU1180676A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2001 |
|
RU2207522C2 |
| Реостатный преобразователь линейных перемещений | 1987 |
|
SU1516746A1 |
| ЭЛЕКТРОННАЯ СИСТЕМА КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 2016 |
|
RU2638919C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
| Реостатный преобразователь линейныхпЕРЕМЕщЕНий | 1979 |
|
SU853367A1 |
| Преобразователь перемещения в частоту | 1985 |
|
SU1317283A1 |
| Дифференциальный емкостной преобразователь углового перемещения | 1990 |
|
SU1775037A3 |
| Преобразователь перемещения в длительность импульсов | 1988 |
|
SU1516750A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ЕМКОСТНОГО АКСЕЛЕРОМЕТРА | 1996 |
|
RU2098832C1 |
Изобретение относится к измериг тельной технике и имеет целью повышение точности преобразования перемещений в частотный электрический сигнал за счет уменьшения влияния перекосов подвижного токосъемного электрода относительно резистивного элемента преобразователя. Преобразователь содержит первый плоский резис- тивный элемент 1, расположенный параллельно ему в одной плоскости неподвижный электрод 2, выполненный в виде пластины длиной, равной длине первого резистивного элемента 1, и подвижный электрод 3, выполненный в виде протяженной пластины, расположенной с зазором относительно резистивного элемента 1 и неподвижного электрода 2 и вьшолняницей функции емкостного токосъемника. По другую сторону подвижного электрода 3 параллельно первому резистивному элементу 1 размещен идентичный ему по размерам и электрическому сопротивлению второй реэистивный элемент 4, подключенный к первому резистивному элементу 1 параллельно. В процессе измерений подвижный электрод 3 связывается с объектом контроля, перемещение которого преобразуется в изменение сопротивления. Размещение подвижного электрода 3 в зазоре между резистив- ными элементами 1 и 4 позволяет снизить влияние его перекосов на результаты измерений. 1 ил. (Л оо -3 х CD К)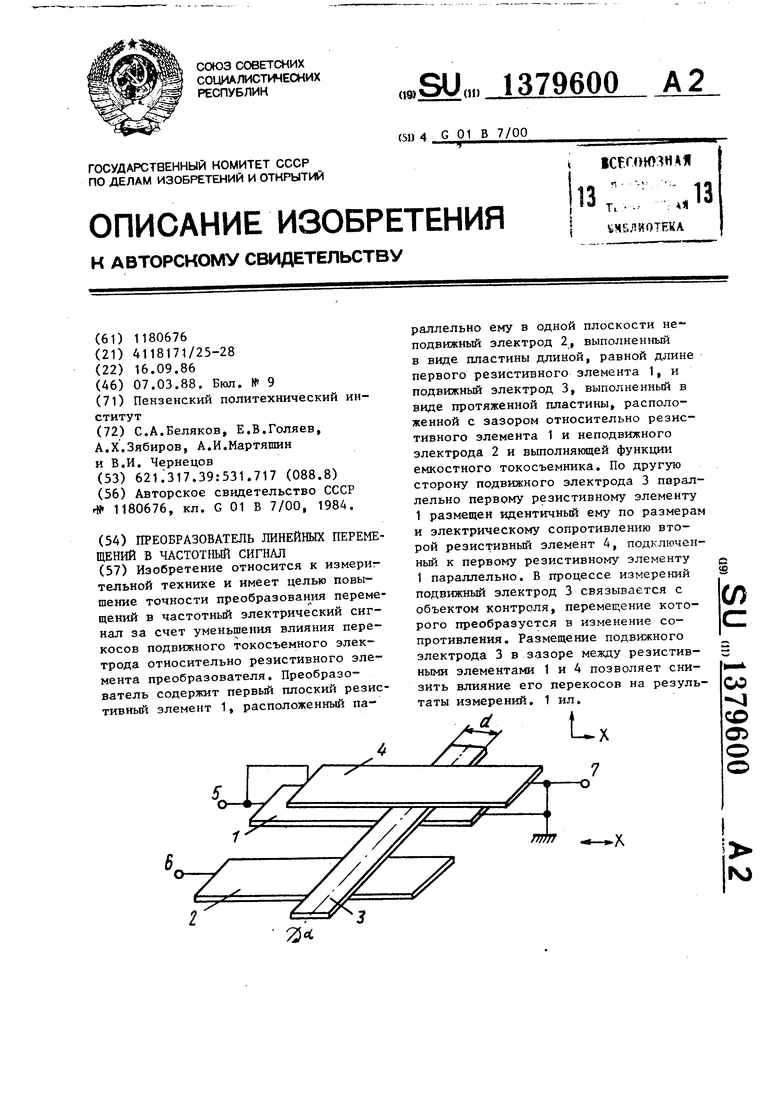
| Преобразователь линейных перемещений в частотный сигнал | 1984 |
|
SU1180676A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
