электропроводящими элементами - и диэлектрическими элементами. Катушки индуктивности расположены в п параллельных плоскостях по четыре в каждой плоскости под углом 90° одна к другой. При перемещении управляющего стержня 3, кинематически связанного с объектом контроля, перемещаются электропроводящие элементы относительно связанных в пары катушек индуктивности. С помощью коммутаторов к выходу преобразователя подключается необходимый канал формирования управляющих сигналов.4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2077025C1 |
| Преобразователь перемещений | 1991 |
|
SU1779907A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2262072C1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1784837A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2007 |
|
RU2339908C1 |
| Двухкоординатный преобразователь угловых перемещений | 1986 |
|
SU1379608A1 |
| Двухкоординатный преобразователь угловых перемещений | 1991 |
|
SU1837154A1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1665224A1 |
| Двухкоординатный преобразователь | 1987 |
|
SU1420355A1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1670377A1 |
Изобретение относится к измерительной технике и имеет целью повышение надежности двухкоординатного преобразователя угут Оой огловых перемещений путем обеспечения многократного резервирования каналов формирования его выходных сигналов при одновременном обеспечении зоны нечувствительности к начальным угловым перемещениям объекта контроля. Двухкоординатиый преобразователь снабжен ползуном 6 с цилиндрической пружиной 7 и дополнительными 4 -(п-1) катушками индуктивности, гДе п - кратность резервирования. Сердечники 20, взаимодействующие с катушками индуктивности вихретокового датчика положения, выпол- . йены в виде набора полых цилиндров, обра- зованных установленными поочередно Vp .X,
Изобретение относится к электроизмерительной технике и автоматике и может быть использовано в системах управления перемещением подвижных объектов, в частности для ручки управления летательных аппаратов.
Целью изобретения является повышение надежности преобразователя при обеспечении его нечувствительности к начальным угловым перемещениям управляющего стержня и минимизации габаритных размеров.
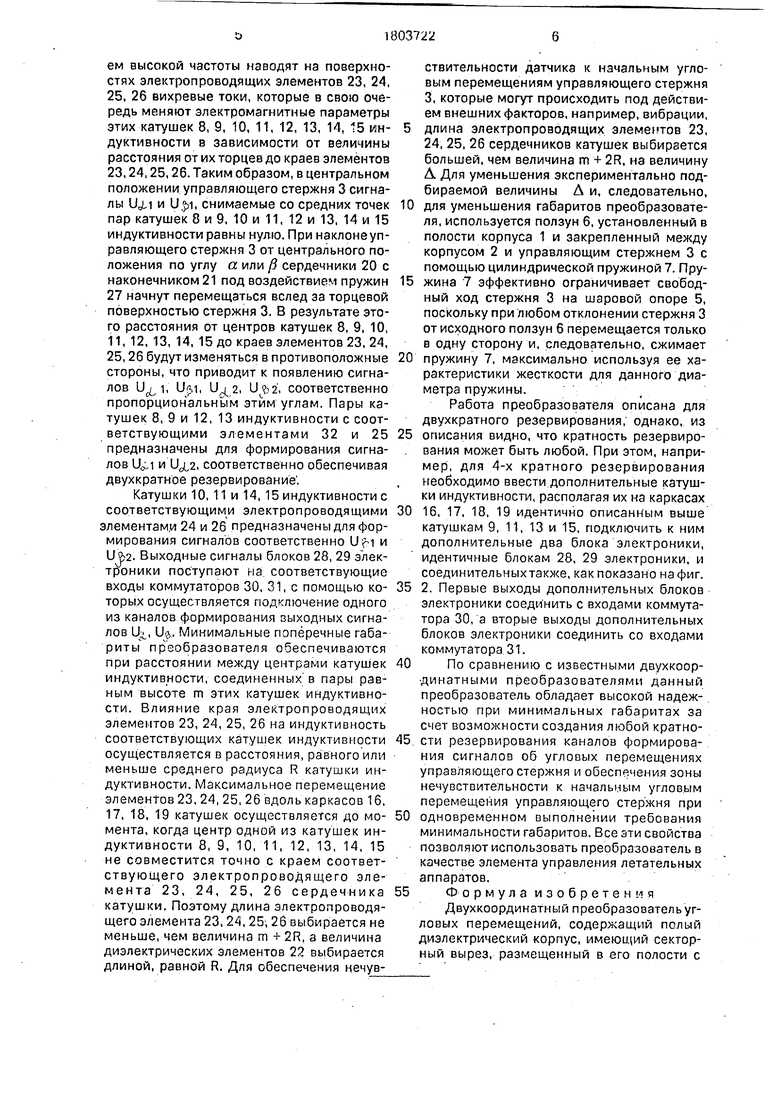
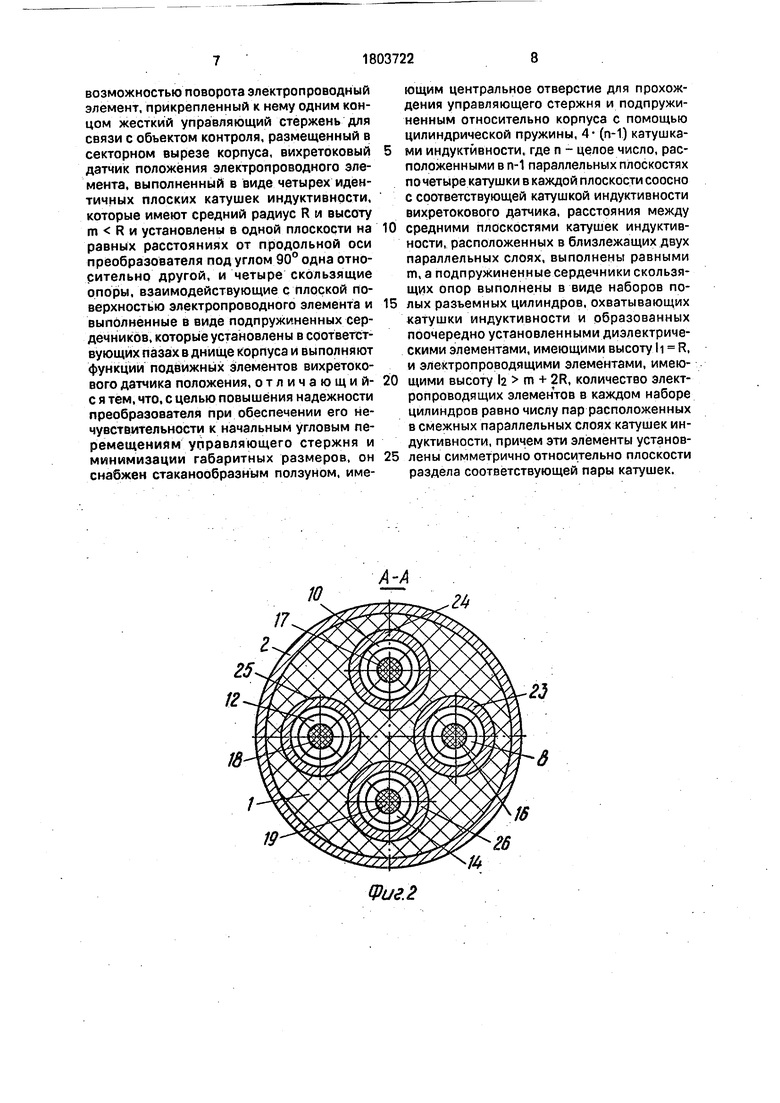
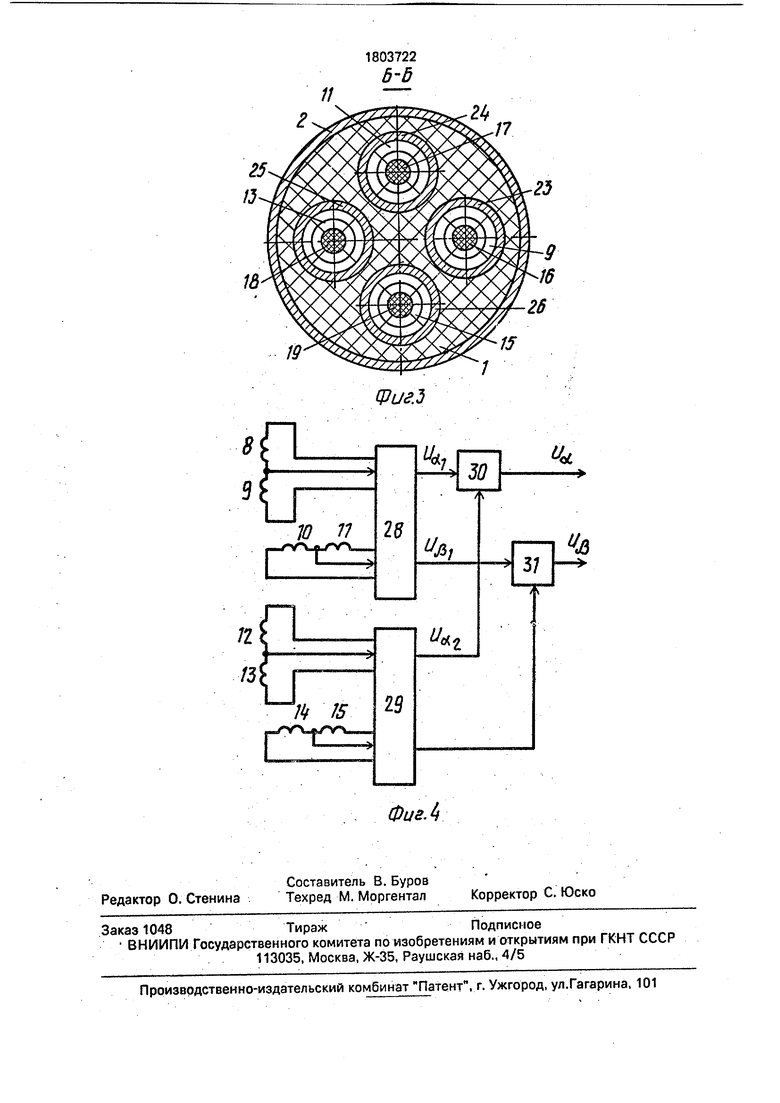
На фиг. 1 показан внешний вид Двухко- ординатного преобразователя с катушками, индуктивности, обеспечивающими четырехкратное резервирование (без блока электроники и коммутаторов); на фиг. 2 -сечение А-А на фиг. 1; на фиг. 3 сечение Б-Б на фиг. 1 преобразователя с блоками электроники и коммутаторами; на фиг. А - структурная схема блока электроники типового двухканаль- ного .вихретокового измерителя с катушками индуктивности преобразователя.
Двухкоординатиый преобразователь содержит диэлектрический корпус 1, закрепленный на нем защитный стаканооб- разный кожух 2 с центральным отверстием в его донышке, и проходящий через это отверстие в кожухе управляющий стержень 3, торцевая поверхность 4 которого установлена на шаровой опоре 5. Стаканообразный ползун 6 с центральным отверстием, через которое проходит стержень 3, подпружинен с помощью цилиндрической пружины Т/установленной в полости корпуса. Четыре пары идентичных катушек 8, 9, 10, 11, 12, 13, 14,15 индуктивности (обозначения позиций даны для двухкратного резервирования, п -2, в общем случаеп может быть более двух и должно быть четным) имеет средний радиус R w высоту га. Катушки установлены на диэлектрических каркасах 16,17, 18, 19, которые закреплены в корпусе 1. Четыре идентичные разъемные полые диэлектрические сердечника 20, охватывающие каркасы 16, 17,18, 19 катушек, установлены с возможным перемещением в пазах корпуса 1, имеют каждый наконечник 21, контактирующий острием с торцевой поверхностью 4 управляющего стержня 3, и состоят из чередующихся.диэлектрических элементов 22 длиной И R и электропроводящих элементов 23,24,25,26 длиной . Ja 2R + т. Сердечники подпружинены с помощью пружин 27. Пары катушек 8 и 9, 10 и 11, 12 и 13,14 и 15
индуктивности, в каждой из которых катушки соединены последовательно встречно, расположены соосно на минимальном расстоянии друг от друга и подключены к входам соответствующих блоков 28, 29
электроники. Первые выходы блоков 28. 29 электроники соединены со входами первого коммутатора 30, а вторые выходы блоков 28, 29 электроники соединены со входами второго коммутатора 31 (фиг.2). Блоки 28, 29
состоят из генератора 32 прямоугольных импульсов, соединенного с усилителями 33 и 34 мощности, синхронных детекторов 35, 36 и усилителей 37, 38.соответствен но первого и второго каналов. С выхода усилителей 37 и 38 снимаются сигналы об угловых перемещениях управляющего стержня 3 в двух взаимно-перпендикулярных плоскостях соответственно и , где п 1,2, 3,... - порядковый номер резервного канала
преобразователя.
Двухкоординатный преобразователь работает следующим образом.
В исходном положении торцевая повер- хность 4 управляющего стержня 3 занимает
положение параллельное плоскостям катушек 8,9, 10,11,12,13,14,15 индуктивности. При этом электропроводящие элементы 23, 24,25, 26 сердечников, охватывающие соответствующие пары катушек 8 и 9,10 и 11,12
и. 13, 14 и 15 индуктивности, располагаются симметрично катушкам в парах, т.е. расстояния от краев элементов 23, 24, 25, 26 до центров катушек 8, 9, 10, 11, 12, 13, 14, 15 индуктивности устанавливаются равными.
Катушки 8-15 индуктивности при питании
через генераторные выходы соответствующих блоков 28, 29 электроники напряжением высокой частоты наводят на поверхностях электропроводящих элементов 23, 24, 25, 26 вихревые токи, которые в свою очередь меняют электромагнитные параметры этих катушек 8, 9, 10, 11, 12, 13, 14, 15 индуктивности в зависимости от величины расстояния от их торцев до краев элементов 23,24,25,26. Таким образом, в центральном положении управляющего стержня 3 сигналы Ц.М и U., снимаемые со средних точек пар катушек 8 и 9, 10 и 11, 12 и 13, 14 и 15 индуктивности равны нулю. При наклоне управляющего стержня 3 от центрального положения по углу а или / сердечники 20 с наконечником 21 под воздействием пружин 27 начнут перемещаться вслед за торцевой поверхностью стержня 3. В результате этого расстояния от центров катушек 8, 9, 10, 11, 12, 13, 14, 15 до краев элементов 23, 24, 25,26 будут изменяться в противоположные стороны, что приводит к появлению сигналов , UfM, U 2, U в2 , соответственно пропорциональным этим углам. Пары катушек 8, 9 и 12, 13 индуктивности с соответствующими элементами 32 и 25 предназначены для формирования сигналов и 1Ц,2, соответственно обеспечивая двухкратное резервирование .
Катушки 10, 11 и 14, 15 индуктивности с соответствующими электропроводящими элементами 24 и 26 предназначены для формирования сигналов соответственно и . Выходные сигналы блоков 28, 29 электроники поступают на соответствующие входы коммутаторов 30, 31, с помощью которых осуществляется подключение одного из каналов формирования выходных сигналов U, 11$.. Минимальные поперечные габариты преобразователя обеспечиваются при расстоянии между центрами катушек индуктивности, соединенных в пары равным высоте m этих катушек индуктивности. Влияние края электропроводящих элементов 23, 24, 25, 26 на индуктивность соответствующих катушек индуктивности осуществляется в расстояния, равного или меньше среднего радиуса R катушки индуктивности. Максимальное перемещение элементов 23,24, 25, 26 вдоль каркасов 16, 17, 18, 19 катушек осуществляется до момента, когда центр одной из катушек индуктивности 8, 9, 10, 11, 12, 13, 14, 15 не совместится точно с краем соответствующего электропроводящего элемента 23, 24, 25, 26 сердечника катушки. Поэтому длина электропроводящего элемента 23, 24, 25; 26 выбирается не меньше, чем величина m + 2R, а величина диэлектрических элементов 22 выбирается длиной, равной R. Для обеспечения нечувствительности датчика к начальным угловым перемещениям управляющего стержня 3, которые могут происходить под действием внешних факторов, например, вибрации,
длина электропроводящих элементов 23, 24, 25, 26 сердечников катушек выбирается большей, чем величина m + 2R, на величину Л Для уменьшения экспериментально подбираемой величины Д и, следовательно,
для уменьшения габаритов преобразователя, используется ползун 6, установленный в полости корпуса 1 и закрепленный между корпусом 2 и управляющим стержнем 3 с помощью цилиндрической пружиной 7. Пружина 7 эффективно ограничивает свободный ход стержня 3 на шаровой опоре 5, поскольку при любом отклонении стержня 3 от исходного ползун 6 перемещается только в одну сторону и, следовательно, сжимает
пружину 7, максимально используя ее характеристики жесткости для данного диаметра пружины.
Работа преобразователя описана для двухкратного резервирования, однако, из
описания видно, что кратность резервиро- вания может быть любой. При этом, например, для 4-х кратного резервирования необходимо ввести дополнительные катушки индуктивности, располагая их на каркасах
16, 17, 18, 19 идентично описанным выше катушкам 9, 11, 13 и 15, подключить к ним дополнительные два блока электроники, идентичные блокам 28, 29 электроники, и соединительныхтакже, как показано на фиг.
По сравнению с известными двухкоор- динатными преобразователями данный преобразователь обладает высокой надежностью при минимальных габаритах за счет возможности создания любой кратности резервирования каналов формирования сигналов об угловых перемещениях управляющего стержня и обеспечения зоны нечувствительности к начальным угловым перемещения управляющего стержня при
одновременном выполнении требования минимальности габаритов. Все зти свойства позволяют использовать преобразователь в качестве элемента управления летательных аппаратов.
Формула изобретен и я
Двухкоординатный преобразователь угловых перемещений, содержащий полый диэлектрический корпус, имеющий секторный вырез, размещенный в его полости с
возможностью поворота электропроводный элемент, прикрепленный к нему одним концом жесткий управляющий стержень для связи с объектом контроля, размещенный в секторном вырезе корпуса, вихретоковый датчик положения электропроводного элемента, выполненный в виде четырех идентичных плоских катушек индуктивности, которые имеют средний радиус R и высоту m R и установлены в одной плоскости на равных расстояниях от продольной оси преобразователя под углом 90° одна относительно другой, и четыре скользящие опоры, взаимодействующие с плоской поверхностью электропроводного элемента и выполненные в виде подпружиненных сердечников, которые установлены в соответствующих пазах в днище корпуса и выполняют функции подвижных элементов вихретоко- вого датчика положения, отличаю щи й- с я тем, что, с целью повышения надежности преобразователя при обеспечении его нечувствительности к начальным угловым перемещениям управляющего стержня и минимизации габаритных размеров, он снабжен стаканообразным ползуном, имеющим центральное отверстие для прохождения управляющего стержня и подпружиненным относительно корпуса с помощью цилиндрической пружины, 4- (п-1) катушками индуктивности, где п - целое число, расположенными в п-1 параллельных плоскостях по четыре катушки в каждой плоскости соосно с соответствующей катушкой индуктивности вихретокового датчика, расстояния между средними плоскостями катушек индуктивности, расположенных в близлежащих двух параллельных слоях, выполнены равными т, а подпружиненные сердечники скользящих опор выполнены в виде наборов полых разъемных цилиндров, охватывающих катушки индуктивности и образованных поочередно установленными диэлектрическими элементами, имеющими высоту Н R, и электропроводящими элементами, имеющими высоту J2 m + 2R, количество электропроводящих элементов в каждом наборе цилиндров равно числу пар расположенных в смежных параллельных слоях катушек индуктивности, причем эти элементы установлены симметрично относительно плоскости раздела соответствующей пары катушек.
Фиг.2
| Двухкоординатный преобразователь | 1987 |
|
SU1420355A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Двухкоординатный преобразователь угловых перемещений | 1988 |
|
SU1599647A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
