СО 00
N3
00
татор 9 коэффициентов второго степенного ряда, а также пороговые блоки 6 и 7 и блоки расчета сумм 10 и П. Оптимальный сигнал управления получают путем умножения напряжения ошибки на переменный коэффициент и суммирования его с напряжением переменного смещения. Переменный коэффициент и переменное смещение получают в результате суммирования членов степенного ряда от регулируемых переменных с заданными коэффициентами ряда, причем с целью увеличения быстродействия переходных процессов и соблюдении ограничений на регулируемые переменные дополнительно в за- даииом порядке измеряют отклонения регулируемых переменных от эталонных сигналов, определяют порядковый номер регулируемой переменной, абсолютное значение отклонения которой ие превосходит заданной положительной величины, напряжение ошибки формируют равным отклонению этой регулируемой переменной, а значения коэффициентов степенного ряда коммутируют с изменением порядкового номера. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1987 |
|
SU1458960A2 |
| Арифметическое устройство для цифровой фильтрации с автоматической регулировкой усиления | 1979 |
|
SU881987A1 |
| Способ формирования сигнала управления | 1979 |
|
SU857931A1 |
| Цифровой генератор спектра фурье | 1973 |
|
SU446063A1 |
| УСТРОЙСТВО ОБРАБОТКИ ЦВЕТНЫХ ИЗОБРАЖЕНИЙ | 1999 |
|
RU2159958C1 |
| Устройство для коррекции телевизионных сигналов изображений | 1988 |
|
SU1672488A1 |
| Устройство для управления приводом манипулятора | 1990 |
|
SU1821356A1 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1994 |
|
RU2113005C1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1983 |
|
SU1089747A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
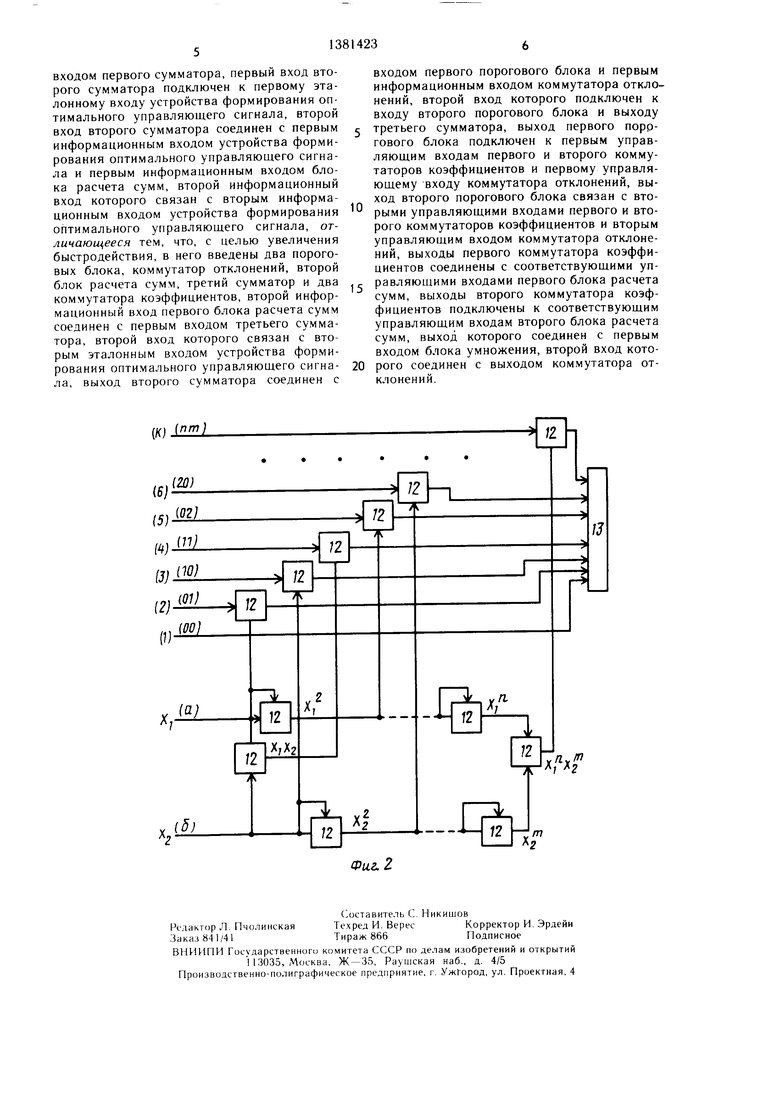
Изобретение относится к автоматическому управлению и может быть использовано для формирования управляющих сигналов оптимальных по быстродействию автоматических систем. Целью изобретения является увеличение быстродействия при соблюдении ограничений на регулируемые переменные и упрощение настройки устройства. Поставленная цель достигается тем, что в устройство, содержащее первое устройство сравнения 2, коммутатор 5 отклонений и последовательно соединенные блок перемножения 4 и сумматор I, введены второе устройство сравнения 3, коммутатор 8 коэффициентов первого степенного ряда и комму
Изобретение относится к устройствам для автоматического управления и может быть использовано для формирования управляющих сигналов оптимальных по быстродействию автоматических систем.
Цель изобретения - увеличение быстродействия (уменьшение времени переходных процессов) при соблюдении ограничений на регулируемые переменные и упрощение настройки устройства.
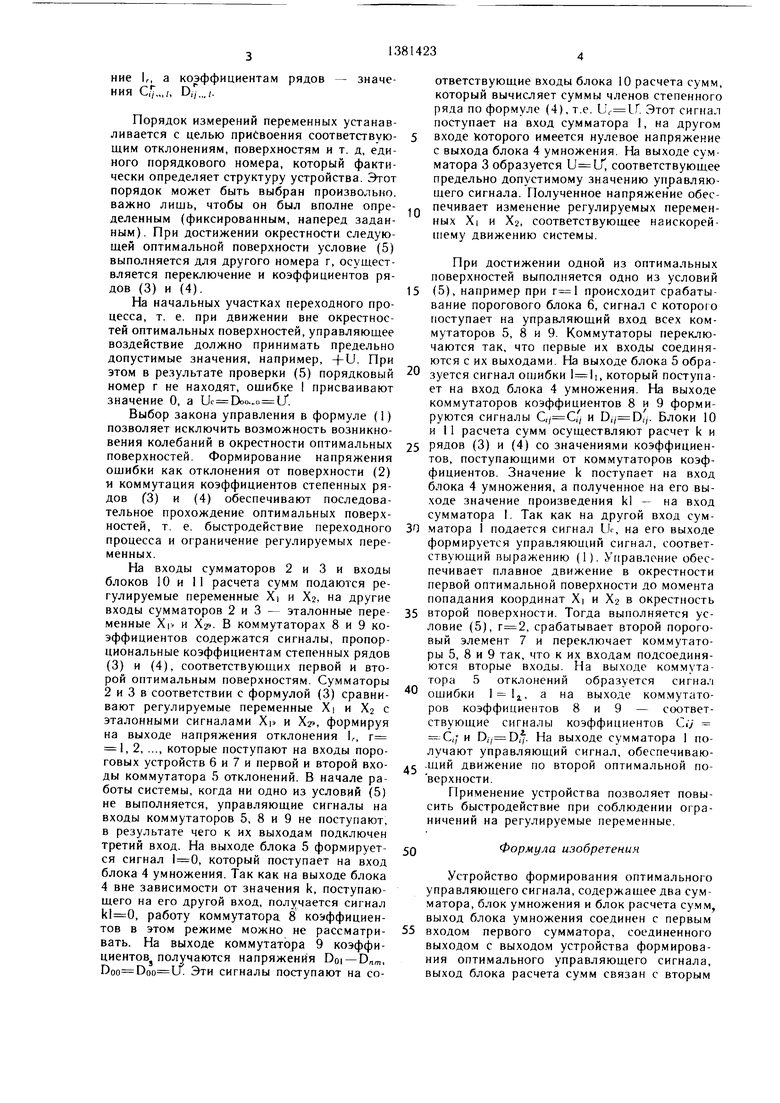
На фиг. 1 представлена блок-схема устройства формирования оптимального управляющего сигнала; на фиг. 2 - блок-схема блока расчета сумм.
Устройство содержит первый 1, второй 2 и третий 3 сумматоры, блок 4 умножения, коммутатор 5 отклонений, первый 6 и второй 7 пороговые блоки, первый 8 и второй 9 коммутаторы коэффициентов, первый 10 и второй 11 блоки расчета сумм, а также блоки 12 умножения и сумматор 13.
Устройство работает следующим обра- зом.
Сигнал оптимального управления
U kl-|--Uc(1)
где k, Uc - переменный коэффициент и переменное смещение, изменяющееся в функции от регулируемых переменных систем; 1 - ошибка.
Управляющий сигнал (1) обеспечивает плавное устойчивое движение нелинейной системы по произвольной оптимальной поверх- ности, на которой регулируемая переменная принимает предельно допустимое значение особой оптимальной поверхности 3. Уравнение г-й опти.мальной поверхности задается в виде
Х.Х,э(Х,,Х2, ...,Х,),
где X, - г-я регулируемая переменная, г
1,2,... ,
Хгэ - г-я эталонная переменная, задаваемая для поверхностей переключения как функция регулируемых переменных, а для граничных поверхностей равна предельно допустимому значению соответствующей переменной Хг. Отклонение двжения от г-й поверхности определяется как
|,Х,-Х.э,(2)
Компоненты К и Uc для каждой поверхности находятся в виде степенных рядов регулируемых переменных или гладких функций, также аппроксимируемых рядами:
k 2 Q,..,xiXJ..x ;(3)
,j.-1
и,.
. D,,...,x;xJ...x/.
(4)
Значения коэффициентов рядов dj -i и D,,,,,/ определяются для каждой г-й поверхности, т. е. с,,.,,,у..,/; 0,;.,.,7,,,л
Число членов ряда определяется аналитически 3. В тех случаях, когда аналитическое рещение получается в виде функции, не являющейся степенным рядом, требуется их полиноминальная аппроксимация. В этом случае число членов степенных рядов выбирается из условия получения точной аппроксимации 4|.
Для получения оптимального по быстродействию переходного процесса с учетом ограничений регулируемых переменных способ формирования управляющего сигнала должен обеспечить последовательное прохождение всех оптимальных поверхностей. Это достигается за счет переключения компонентов 1л и с,(Г„/, D,,,,,/ в зависимости от порядкового номера г поверхности малой окрестности, которой принадлежит текущее состояние системы.
Для нахождения порядкового номера г в заданном порядке измеряют отклонение 1, и проверяют условия принадлежности к окрестностям
,(5)
где Кг - заданные положительные числа.
Находят г, для которого выполняется условие (5). Ощибке 1 присваивается значение Ir, а коэффициентам рядов - значения С,7„,;, DI/.,./
Порядок измерений переменных устанавливается с целью присвоения соответствующим отклонениям, поверхностям и т. д, единого порядкового номера, который фактически определяет структуру устройства. Этот порядок может быть выбран произвольно, важно лишь, чтобы он был вполне определенным (фиксированным, наперед заданным). При достижении окрестности следующей оптимальной поверхности условие (5) выполняется для другого номера г, осуществляется переключение и коэффициентов рядов (3) и (4).
На начальных участках переходного процесса, т. е, при движении вне окрестностей оптимальных поверхностей, управляющее воздействие должно принимать предельно допустимые значения, например, -|-U. При этом в результате проверки (5) порядковый номер г не находят, ощибке I присваивают значение О, а )oo...
Выбор закона управления в формуле (1) позволяет исключить возможность возникновения колебаний в окрестности оптимальных поверхностей. Формирование напряжения ощибки как отклонения от поверхности (2) t коммутация коэффициентов степенных рядов (3) и (4) обеспечивают последовательное прохождение оптимальных поверхностей, т. е. быстродействие переходного процесса и ограничение регулируемых переменных.
На входы сумматоров 2 и 3 и входы блоков 10 и 11 расчета сумм подаются регулируемые переменные X: и Х2, на другие входы сумматоров 2 и 3 - эталонные переменные Хр и Ху. В коммутаторах 8 и 9 коэффициентов содержатся сигналы, пропорциональные коэффициентам степенных рядов (3) и (4), соответствующих первой и второй оптимальным поверхностям. Сумматоры 2 и 3 в соответствии с формулой (3) сравнивают регулируемые переменные X| и Х2 с эталонными сигналами Хр и Х2, формируя на выходе напряжения отклонения I,, г 1,2, ..., которые поступают на входы пороговых устройств 6 и 7 и первой и второй входы коммутатора 5 отклонений. В начале работы системы, когда ни одно из условий (5) не выполняется, управляющие сигналы на входы коммутаторов 5, 8 и 9 не поступают, в результате чего к их выходам подключен третий вход. На выходе блока 5 формируется сигнал , который поступает на вход блока 4 умножения. Так как на выходе блока 4 вне зависимости от значения k, поступающего на его другой вход, получается сигнал , работу коммутатора 8 коэффициентов в этом режиме можно не рассматривать. На выходе коммутатора 9 коэффициентов получаются напряжения , . Эти сигналы поступают на соответствующие входы блока 10 расчета сумм, который вычисляет суммы членов степенного ряда по формуле (4), т.е. Этот сигнал поступает на вход сумматора 1, на другом
входе которого имеется нулевое напряжение с выхода блока 4 умножения. На выходе сумматора 3 образуется , соответствующее предельно допустимому значению управляющего сигнала. Полученное напряжен ие обесf. печивает изменение регулируемых переменных Х| и Ха, соответствующее наискорейшему движению системы.
При достижении одной из оптимальных поверхностей выполняется одно из условий
5 (5), например при происходит срабатывание порогового блока 6, сигнал с которого поступает на управляющий вход всех коммутаторов 5, 8 и 9. Коммутаторы переключаются так, что первые их входы соединяются с их выходами. На выходе блока 5 обра0 зуется сигнал ошибки , который поступает на вход блока 4 умножения. На выходе коммутаторов коэффициентов 8 и 9 формируются сигналы С,,С, и D,,,. Блоки 10 и 11 расчета сумм осуществляют расчет k и
5 рядов (3) и (4) со значениями коэффициентов, поступающими от коммутаторов коэффициентов. Значение k поступает на вход блока 4 умножения, а полученное на его выходе значение произведения kl - на вход сумматора 1. Так как на другой вход сумQ матора 1 подается сигнал Uc, на его выходе формируется управляющий сигнал, соответствующий выражению (1). Управление обеспечивает плавное движение в окрестности первой оптимальной поверхности до момента попадания координат X| и Х2 в окрестность
5 второй поверхности. Тогда выполняется условие (5), , срабатывает второй пороговый элемент 7 и переключает ком.мутато- ры 5, 8 и 9 так, что к их входам подсоединяются вторые входы. На выходе коммутатора 5 отклонений образуется сигнал
0 ошибки , а на выходе коммутаторов коэффициентов 8 и 9 - соответствующие сигналы коэффициентов С. У С,/ и D,, D,7. На выходе сумматора 1 получают управляющий сигнал, обеспечнваюс .щий движение по второй оптимальной по- верхности.
Применение устройства позволяет повысить быстродействие при соблюдении ограничений на регулируемые переменные.
50
Формула изобретения
Устройство формирования оптимального управляющего сигнала, содержащее два сумматора, блок умножения и блок расчета сумм, выход блока умножения соединен с первым входом первого сумматора, соединенного выходом с выходом устройства формирования оптимального управляющего сигнала, выход блока расчета сумм связан с вторым
входом первого сумматора, первый вход второго сумматора подключен к первому эталонному входу устройства формирования оптимального управляющего сигнала, второй вход второго сумматора соединен с первым информационным входом устройства формирования оптимального управляющего сигнала и первым информационным входом блока расчета сумм, второй информационный вход которого связан с вторым информационным входом устройства формирования оптимального управляющего сигнала, отличающееся тем, что, с целью увеличения быстродействия, в него введены два пороговых блока, коммутатор отклонений, второй блок расчета сумм, третий сумматор и два коммутатора коэффициентов, второй информационный вход первого блока расчета сумм соединен с первым входом третьего сумматора, второй вход которого связан с вторым эталонным входом устройства формирования оптимального управляющего сигнала, выход второго сумматора соединен с
0
входом первого порогового блока и первым информационным входом коммутатора отклонений, второй вход которого подключен к входу второго порогового блока и выходу третьего сумматора, выход первого порр- гового блока подключен к первым управляющим входам первого и второго коммутаторов коэффициентов и первому управляющему входу коммутатора отклонений, выход второго порогового блока связан с вторыми управляющими входами первого и второго коммутаторов коэффициентов и вторым управляющим входом коммутатора отклонений, выходы первого коммутатора коэффициентов соединены с соответствующими уп- г равляющими входами первого блока расчета сумм, выходы второго коммутатора коэффициентов подключены к соответствующим управляющим входам второго блока расчета сумм, выход которого соединен с первым входом блока умножения, второй вход которого соединен с выходом коммутатора отклонений.
0
| Способ стабилизации тока якоря электродвигателя постоянного тока | 1984 |
|
SU1270854A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Электропривод | 1984 |
|
SU1228207A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Дроздов В | |||
| Н., Козярук А | |||
| Е., Мирошник И | |||
| В | |||
| Системы управления электроприводом с использованием микроЭВМ | |||
| - Л | |||
| ЛДНТП, 1984 | |||
| Хемминг Р | |||
| В | |||
| Численные методы | |||
| - М.: Наука, 1968, с | |||
| Способ фотографической записи звуковых колебаний | 1922 |
|
SU400A1 |
