Изобретение относится к электротехнике, в частности к устройствам автоматического управления электродвигателями постоянного тока независимого возбуждения, обеспечивающим оптимальное по быстродействию управление в переходных процессах путем изменения потока возбуждения, и может быть применено в системах управления общепромыпшенных электроприводов.
Целью изобретения является повышение точности.
Па чертеже представлена структурная схема электропривода постоянного тока.
Электропривод содержит электродвигатель 1, задающий блок 2, первый выход которого соединен, с первым входом первого сум1-1атора 3, второй вход которого соединен с выходом датчика А скорости вращения электродвигателя 1, стационарный функциональньй преобразователь 5, нелинейный элемент 6 с релейной характеристикой, усилитель 7 мощности, выход которого соединен с обмоткой возбуждения электродвигателя 1, датчик 8 тока возбуждения . электродвигателя 1, перестраиваемьй функциональный преобразователь 9, блок 10 расчета параметров аппроксимации скорости, логический блок It и первый коммутатор 12. Первый выход задающего блока 2 соединен с входом блока 10 расчета параметров аппроксимации скорости, выходы которого соединены с первым и вторым входами перестраиваемого функционального преобразователя 9, третьим входом соединенного с выходом первого сумматора 3, а четвертым входом - с выходом датчика 8 тока возбуждения электродвигателя 1 и первым входом стационарного функционального преобразователя 5, второй вход которого соединен с выходом датчика 4 скорости вращения электродвигателя 1. Выход стационарного функционального преобразователя 5 подключен к первому входу логического блока 11, второй вход которого соединен с выходом перестраиваемого функционального преобразователя 9 Выход логического блока 11 подключен к управляющему входу первого коммутатора 12. Устройство содержит также функциональный преобразователь 13 и блок 1А механической характеристики производственного механизма, вход которого соединен с выходом датчика 4
5
0
5
0
5
0
скорости вращения электродвигателя 1, а выход подключен к первому входу функционального преобразователя 13, вторым входом подключенного к выходу датчика 8 тока возбуткдения электродвигателя 1, а выходом соединенного с первым информационным входом первого коммутатора 12, второй информационный вход которого подключен к выходу нелинейного элемента 6с релейной характеристикой, вход которого подключен к выходу перестраиваемого функционального преобразователя 9. Кроме того, электропривод содержит дополнительный функциональный преобразователь 15, первый и второй входы которого соединены соответственно с вторым и третьим выходами задающего блока 2, четвертый выход которого соединен с первым входом коьтаратора
16,второй вход которого соединен с выходом первого сумматора 3. Выход компаратора 16 соединен с управляющим входом второго коммутатора 17, первый информационный вход которого соединен с выходом второго сумматора 18, первым входом соединенного с выходом функционального преобра:зова- теля 13, а вторым входом - с выходом дополнительного функционального преобразователя 15. Выход первого коммутатора 12 соединен с вторым информационным входом второго коммутатора
17,выход которого соединен с входом усилителя 7 мощности.
Электропривод работает следующим образом.
Электродвигатель 1, управляемый по цепи возбуждения, с учетом коэффициента усилителя 7 мощности описывается системой нелинейных дифференциальных уравнений:
J (U(x,)H-a,, х,х +
dt
d Хг dt
а i X ;
(1)
+ bU,
i где Xj - угловая скорость вращения электродвигателя 1; ток обмотки возбуждения электродвигателя 1j и - напряжение на входе усилителя 7 мощности
ju(x,) -приведенный момент сопротивления производственного механизма, |1((х,) 0;
Ь, а„ ,
а ,j , а -постоянные коэффициенты, причем а„ Oj а, 0;
iг
i 0; b 0.
14589604
Особое оптимальное управление реализуется в соответствии с зависимосI ТЬЮ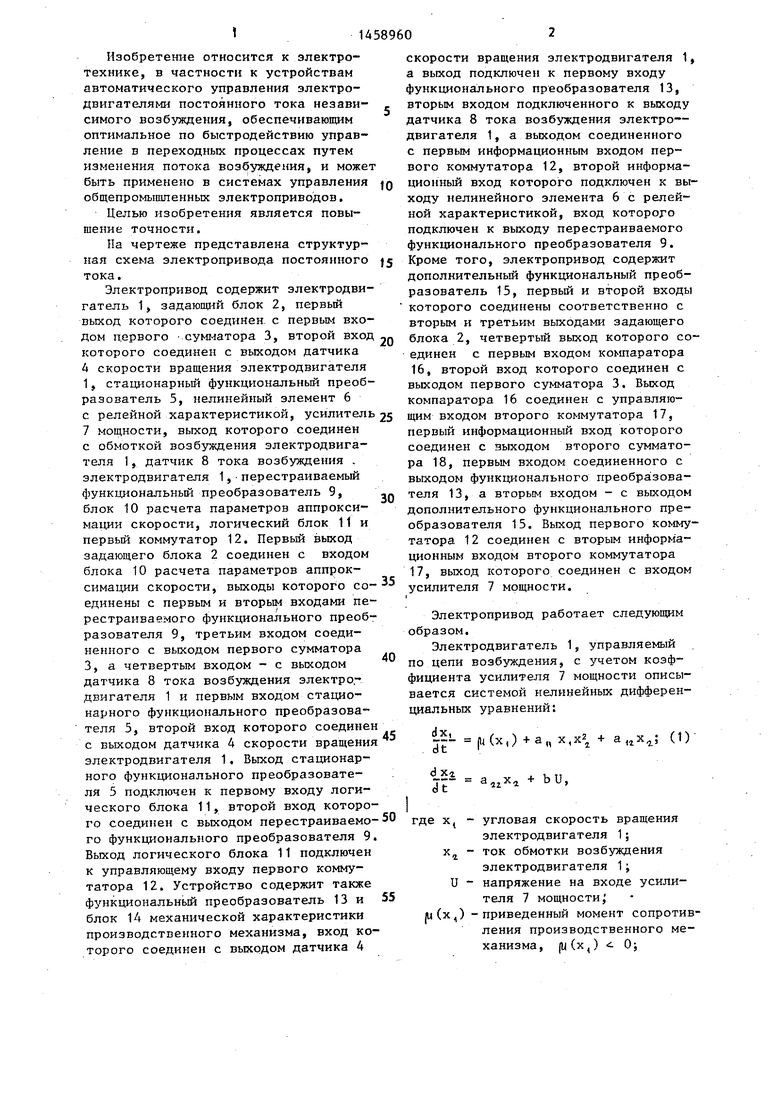

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1986 |
|
SU1394385A1 |
| Электропривод постоянного тока | 1989 |
|
SU1697239A1 |
| Электропривод | 1981 |
|
SU964938A1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
| Позиционный электропривод постоянного тока | 1981 |
|
SU1072223A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Система оптимального управления объектами второго порядка | 1981 |
|
SU954934A2 |
| Устройство для отображения графической информации на экране электронно-лучевой трубки | 1981 |
|
SU974402A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1984 |
|
SU1432705A2 |
Изобретение относится к электротехнике, в частности к устройствам автоматического управления электродвигателями -постоянного тока независимого возбуждения, обеспечивающим оптимальное по быстродействию управление в переходных процессах путем изменения потока возбуждения, и мо- жат быть применено в системах управления общепромышленных электроприводов. Цель изобретения - повьшение точности. Электропривод содержит электродвигатель 1, вход которого подключен к выходу усилителя 7 мощности. Первый коммутатор 12 осуществляет переключение структуры оптимального по быстродействию управления. При этом на вход усилителя 7 мощности через второй коммутатор 17 проходит сигнал Up от нелинейного элемента 6 с релейной характеристикой или сигнал Ufl от функционального преобразователя ТЗ в зависимости от значения сигнала i логического блока 11. Переключение управления электродвигателем с оптимального по быстродействию на стабилизацию конеч ных координат производится вторым коммутатором 17 по выходному сигналу компаратора 16, который оценивает отклонение текущих координат электро двигателя от конечных, что позволяет повысить точность. 1 ил. - Ф ,, ШШ Oi 00 О5 М
IT - Si ajt.x| i) , . а,г- b
Конечные состояния х(Т) в зависимости от граничных условий лежат на линиях переключения, которые описываются приближенным уравнением
X, х, + с,х.
+ с,х
(3)
где с,, с J, - коэффициенты аппроксимации фазовых траекторий, проходящих через конечные точки при управлении и +Uo. Значения коэффициентов с и с, зависят от значения конечной скорости вращения х, .
Отклонения движения системы от рассматриваемых участков, оптимальной траектории оцениваются функциями:
1 V 4. -SiL-. 2а„х./(4)
IP (х, х,-г) - с,,.
Сигналы IQ и 1, получают с помо- щью перестраиваемого и стационарного функциональных преобразователей 9 и 5 как результат обработки выходных сигналов датчиков 4 и 8 и сумматора 3. Перестраиваемый функциональный преобразователь 9 настраивается автоматически в соответствии с текущими значениями параметров с, и с,, вьфа- батываемых блоком 10 расчета параметров аппроксимации скорости. Блок 10 также является функциональным преобразователем, который вьщает параметры с, и Cj приближенной кривой, проходящей через конечную точку х. Особое оптимальное управление U вы
рабатывается функциональным преобразователем 13 в зависимости от сигналов датчика 8 тока возбуждения электродвигателя 1 и блока 14 механической характеристики производственного механизма, когорьй также является функциональным преобразователем, определяющим значения /и(х,) по сигналам от датчика 4 скорости вращения электродвигателя 1.
Для реализации требуемых оптимальных по быстродействию последовательностей управляющих воздействий U, зависящих от граничных условий х(0).
0
5
0
5
5
О 0 5
х(Т) и текущих значений координат х и Xj, формируется переменная структура управления по отклонению вида
и
и
и,
Р
ос
если
если
(5)
и
ос
i 0; i 1,
где Up UoSignl - релейное управление, реализуемое нелинейным элементом 6j особое оптимальное управление (2), формируемое функциональным преобразователем 13 i
i - выходной сигнал логического блока 11, поступающий на управляющий вход первого коммутатора 12.
Значения сигнала i, следовательно, структура управления (5) зависит от координат электродвигателя 1 относительно особой траектории и траектории, проходящей через конечную координату х(Т). В случае расположения граничных условий выше точки экстремума Хд логический блок 11 вырабатывает следующий алгоритм:
fl, если (1, 0) Л (1, 0), о в остальных случаях,
где Л - оператор логического умножения .
Первый коммутатор 12 осуществляет переключение структуры оптимального по быстродействию управления Ug., при этом на вход усилителя 7 мощности в
50 режиме оптимального по быстродействию перехода через второй коммутатор 17 проходит сигнал Up от нелинейного элемента 6 с релейной характеристикой или сигнал Up от функционального
55 преобразователя 13 в зависимости от значения сигнала i логического блока 11.
Управляющая последовательность вида (5) обеспечивает за минимальное
514
время переход из начальной точки х(0) в конечную точку х(Т). После того, как электропривод будет переведен в конечную точку х(Т), необходимо за- стабилизировать конечные координаты х и х„, т.е. предать конечным координатам асимптотическую устойчивость, получение которой не -входит в задачу оптимального по быстродей- ствию управления.
Синтез системы стабилизации конечных координат электропривода х(Т)
|- (uUi) « а„ х,х| + a,jX2;
где Ugj. + W(x(T)) Up - управление
для стабилизации конечных координат электропривода.
Для системы стабилизации (6) необходимо найти добавку управления W(x(T)), чтобы особой точкой системы (6) являлась конечная точка х(Т), т.е. вьшолнялось условие
0; 2.(з,(т)) о, (7)
ам
2 X
тогда W(x(T)) - - хдз
b
т |U (х,т). .
Алгоритм стабилизации конечных координат эле чтропривода с использованием особого оптимального управления реализуется в электроприводе с помощью дополнительно введенных блоков. Управление стабилизации конечных координат и.,. , равное сумме особого оптимального управления U (2), обеспечивающего оптимальное быстродействие, и добавки управления V7(x(T)) (7), зависящей от конечных координат вырабатьшается вторым сумматором 18, на входы которого подаются выходной сигнал функционального преобразователя 13, соответствующий U , и выходной сигнал дополнительного функционального преобразователя 15, равный W(x(T)).
Переключение управления U электродвигателя 1 с оптимального по быстродействию управления Uy (5), являющегося выходным сигналом первого ком (х
IT
4Т
) показывает, что если известно управление И , обеспечивающее устойчивость положения равновесия исходной системы, то можно построить систему стабилизации с добав кой управления W(x(T)) такой, чтобы состоянием равновесия систег стабилизации служила конечная точка х(Т), Система стабилизации для исходной системы (1) при особом управлении (2) с добавкой управления W(x(T)) примет вид
.(,i ajjXj
а, b
rfW(K{T))),
20
мутатора 12, на управление стабилизации конечных координат и„ , снимаемое с выхода второго сумматора 18, производится вторым коммутатором 17 по
25 условию
Ug, если h 0;
и
Up , если h 1 .
h
Управляющий сигнал h для переклю- чения второго коммутатора 17 получается на компараторе 16, который оценивает отклонение модуля разности |х, - х,/ текущего значения скорости х, и конечной скорости х, от заданной величины зоны стабилизации б, внутри которой включается управление стабилизации конечных координат U , а вне зоны включено оптимальное по быстродействию управление Uj. Сигнал h равен:
fo, если /X, - х, , 1, если / X, - х,т / 5 .
Разность (х, - х,) снимается с первого сумматора 3, а сигнал зоны
стабилизации определяется задающим блоком 2, с которого выдаются также конечная координата и момент сопротивления fu(x) для формирования добавки управления U(x(T)) в соотпетствии с уравнением (7) на дополни- f тельном функциональном преобразователе 15.
Введение сигнала зоны стабилизации 5 необходимо для того, чтобы произвоить стабилизацию конечных координат электродвигателя 1 не только при равенстве текущей координаты х, конечной х,, т.е. при условии (х, - х)
0, но и в некоторой окрестности конечной координаты | х, - x, что позволяет вьшолнять такие показатели переходного процесса, как время регулирования и перерегулирование.
Применение изобретения позволяет совместить высокое быстродействие в переходных режимах работы электропривода и стабилизацию заданных коорди- нат электродвигателя в установившихся режимах и повысить точность регулирования координат электродвигателя и КЦД электропривода путем снижения отклонений координат и управления элек- тродвигателя от заданных значений.
Формула изобретения
Электропривод постоянного тока ПС авт. св. N 1394385, отличающийся тем, что, с целью повышения точности, в него введены второй сумматор, второй коммутатор, компаратор, реализующий закон управления
h
если если
/:
- X.
/X, - Х,т|
,
дополнительный функциональный преобразователь, реализующий зависимость
W(x(T)) -х|
- 2
а II
Чт f(x.T
b iT -a,,j.b-2 первый и второй входы которого соединены соответственно с вторым и третьим выходами задающего блока, чет
вертый выход которого соединен с первым входом компаратора, второй вход которого соединен с выходом первого сумматора, выход компаратора соединен с управляющим входом второго коммутатора, первый информационный вход которого соединен с выходом второго сумматора, первый вход которого соединен с выходом функционального преобразователя, второй вход второго сумматора соединен с выходом дополнительного функционального преобразователя, выход первого коммутатора соединен с вторым информационным входом второго коммутатора, вькод которого соединен с входом усилителя мощности, при этом
X, - угловая скорость вращения электродвигателя}
| )
г
b - постоянные коэффициенты;
,,х ) -конечные координаты
х(Т) (х
электродвигателяi |u(x, ) -механическая характеристика производственного механизма ,
W(x(T)) -выходной сигнал дополнительного функционального преобразователяi h - выходной сигнал компаратора;
5 - зона стабилизации конечных координат электродвигателя.
| Электропривод постоянного тока | 1986 |
|
SU1394385A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
