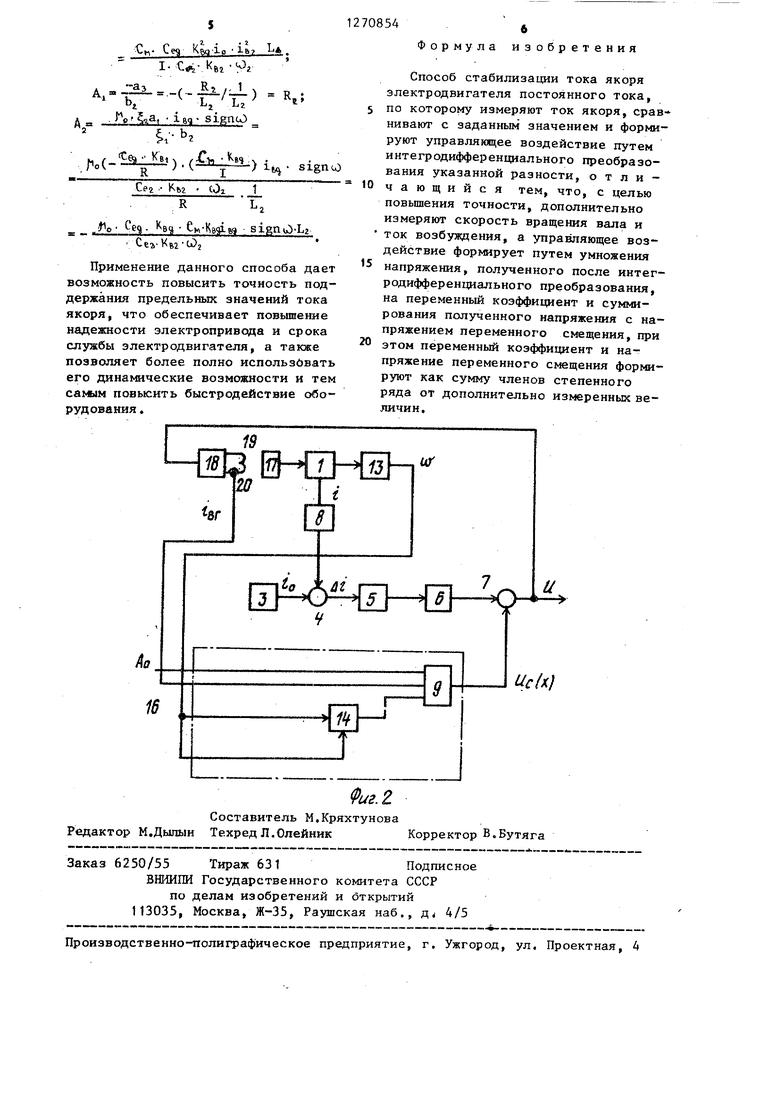
1 Изобретение относится к элекгротехнике и может быть использовано для упрощения электродвигателями постоянного тока. Цель изобретения - повышение точ ности. На фиг. 1 и 2 представлены схемы электроприводов, реализунвдчх данный способ, Электропривод (фиг. 1) содержит электродвигатель 1, обмотка возбуждения которого подключена к усилителю 2, блок 3 задания, выход которого через последовательно сое;:1;инен ные первый сумматор 4, регулятор 5 тока, первый блок 6 умножения и вто рой сумматор 7 соединен с входом усилителя 2, датчик 8 тока якоря электродвигателя 1 соединен с вторым входом первого сумматора 4, вто рой вход второго сумматора 7 соеди нен с выходом суммирующего усилителя 9, первый вход которого соединен с датчиком 10 тока возбуждения непосредственно и с первым входом второго блока 11 умножения, второй вход суммирующего усилителя 9 соединен с датчиком 10 тока возбуждения через последовательно соединенные второй блок 11 умножения и первый блок 12 деления, а третий соединен с датчиком 13 скорости через третий блок 14 умножения, второй вход первого блока 12 деления соединен с датчиком 13 скорости и с первым входом второго блока 15 деления, второй вход которо го соединен с«источником 16 постоянного надряжения, а выход второго бло ка 15 деления соединен с вторым входом первого блока 6 умножения. Электропривод (фиг, 2) содер кит электродвигатель 1, якорная обмотка которого подключена к генератору 17, блок 3 задания, выход которого через последовательно соединенные первый 4 сумматор, регулятор 5 тока, первый блок 6 и второй сумматор 7 соединен с входом усилителя 18, выход которого соединен с обмоткой 19 возбуждения генератора 17, датчика 8 тока якоря электродвигателя 1 соединен с вторым входом первого сумматора 4, второй вход второго сумматора 7 соединен с выходом суммирующего усилителя 9, первый вход которого соединен с источником 16 постоянного напряжения, второй вход суммирующего усилителя 9 соединен с датчиком 20 возбуждения генератора 17, а ий - через блок 14 умножения с иком 13 скорости, второй вход а 14 умножения соединен также с иком 13 скорости. лектропривод, реализующий данный об, работает следующим образом. соответствии с данным способом вхшющий сигнал формируется как K(t)W(P)uiH-Ut(x), (1) - сигнал рассогласования J (x) - ток якоря i i - заданное значение тока, X - вектор переменных состояния электропривода, определяемый дифференциальным уравнением х.(1,х)+ъи; W(p) - дробнорациональная функция от р., являющаяся передаточной функцией интегродифференциального преобразования ; Р- оператор дифференцирования;К(х) - переменный коэ4х})ициент; U(. (х) - переменное смещение, f(x) - вектор нелинейных функций;b - вектор постоянных коэффициентов, (х) - нелинейная функция. ыбираются 1/(f Ь); U(x)(i,,j()/(). (3) конкретных случаях вьфажения (2) ) могут быть записаны как суммы ов степенных рядов от переменсостояния О, во б2 (х) Bi(o c(x) ГА)( угловая скорость вращения электродвигателя; igq - ток обмотки возбуждения электродвигателя, igj - ток обмотки возбуждения генератора; , D - постоянные коэффициенты; j ,3,..,, J, - показатели степени. Таким образом, в соответствии с данным, способом управлякяций сигнал и формируется в виде суммы двух ком понент (1), Первая из них представлена в виде произведения переменног коэффициента i(x), определяемого вы ражением (2), на результат интегро дифференциального преобразования W(p) сигнала рассогласования по току д1. Она обеспечивает получение апериодического переходного процесса и снижение чувствительности процесса стабилизации к вариациям пара метров электропривода.. Вторая комронента, т.е. переменное смещение Uc() с (х) , получается в виде функции (3) от переменных состояния и обеспечивает получение нулевой уста новившейся ошибки стабилизации тока якоря. Электропривод с управлением по цепи обмотки возбуждения электродви гателя работает следующим образом. Электропривод может быть описан системой уравнений: duydt a igg. i- ; di ,U, e0 где ,,u)i,g; J. 5 fio постоянные коэффициенты. Управляющий сигнал формируется согласно выражению (1): К(х) 5,00-1 ; U.(x) A,i| /o+A2iftj+Aju) ij , 11RL. где Ь т-г- -г Т- 92°1 -«Ч RLq ., I b. - 1/Ч I . ai Го-sign О hosigncOLi I Qj -ei электрические постоянные электродвигателя и генератора;Сп - механическая постоянная электродвигателя; К KB, крутизна кривой намагничивания электродвигателя и генератора; R - сопротивление якорной цепи электродвигателя, Ц , Ц - индуктивность обмотки возбуждения электродвигателя и генератора; I - момент инерции на валу электродвигателя; РО- удельный момент вязкого трения. От блока 3 задания на первый вход сумматора 4 поступает задание на ток якоря ij, , на второй вход сумматора 4 поступает сигнал от датчика 8 тока, разностный сигнал поступает на регулятор 5 тока, а затем умножается на переменный коэффициент К(х), сформированный на выходе блока 15 давления по-информации с датчика 13 скорости и источника 16 постоянного напряжения. Полученный сигнал суммируется с переменным смещением Up(x), полученным на выходе суммирукщего усилителя 9. Расчет переменного коэффициента 1(х) и переменного смещения UtCJ) производится с помощью блоков 11 и 14 умножения и блоков 12 и 15 деления согласно вьфажениям (4). Данный способ может быть применен для управления электроприводом по схеме генератор-двигатель, при этом ij.const, а измерение производится в цепи обмотки возбуждения генератора. Электропривод может быть описан системой уравнений: c)(, (ig i,- foO signiOjl ; .. . . Используя формулы (2) и (3), находим выражения для переменного коэффициента К(х) и переменного смещения и (х) : К(х)ь„ ; и(х) АО +А; ц + )% R-Lj, С.г- Квг-и).г i R Rj, т - a, Sa- Ic Ift)
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1984 |
|
SU1228207A1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1997 |
|
RU2123230C1 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
| Датчик статической и динамической составляющих тока электродвигателя постоянного тока | 1981 |
|
SU945813A1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Электропривод постоянного тока | 1987 |
|
SU1458960A2 |
| Электропривод постоянного тока | 1985 |
|
SU1332501A1 |
| Двухъякорный электропривод постоянного тока | 1990 |
|
SU1767678A1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока. Повышение точности обеспечивается за счет того, что с помощью датчика скорости 13 дополнительно измеряют скорость вращения вала электродвигателя 1, а с помощью датчика тока возбзгадения 10 - ток возбуждения электродвигателя ; 1. . В соответствии с данным способом управляющий сигнал фop в pyeтcя на выходе сумматора 7 в виде суммы двух компонент. Первая составляющая представляет собой произведение переменного коэффициента К(х) на результат интегродифференциального преобразования сигнала рассогласования по то ку л1, вторая - переменное смещение и(х), причем переменный коэффици(Л ент и переменное смеще1ше формируются как сумма членов степенных рядов от дополнительно измеренных величин. го о 00 СП 4:
| Шипилло В.П | |||
| Автоматизированный вентильный электропривод | |||
| - М.: Энергия, 1969, с | |||
| Дровопильное устройство | 1921 |
|
SU302A1 |
| Лебедев Б.Д., Неймари А.А | |||
| Унифицирование системы автоматического регулирования электропривода | |||
| - М.: Информстандартэлектро, 1967, с.9-12. | |||
