(21} 4J05236/29-03 (22) 30.07.86 (46) 23.03.88. Бюл. №11 (71} Красноярский политехнический инститз и Красноярское производственное объединение тяжельк экскаваторов Крастяжмаш (72) В.П.Кочетков, Л.П.Глазунов, О.Е.Галлингер и О.В.Шалаш
(53)62J.878.74(088.8)
(56)Авторское свидетельство СССР № 281600, кл. Е 02 F 3/48, J970.
Айтррское свидетельство СССР № 10908J3, кл. Е 02 F 9/20, 1983.
(54)УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ОДНОКОВШОВОГО ЭКСКАВАТОРА
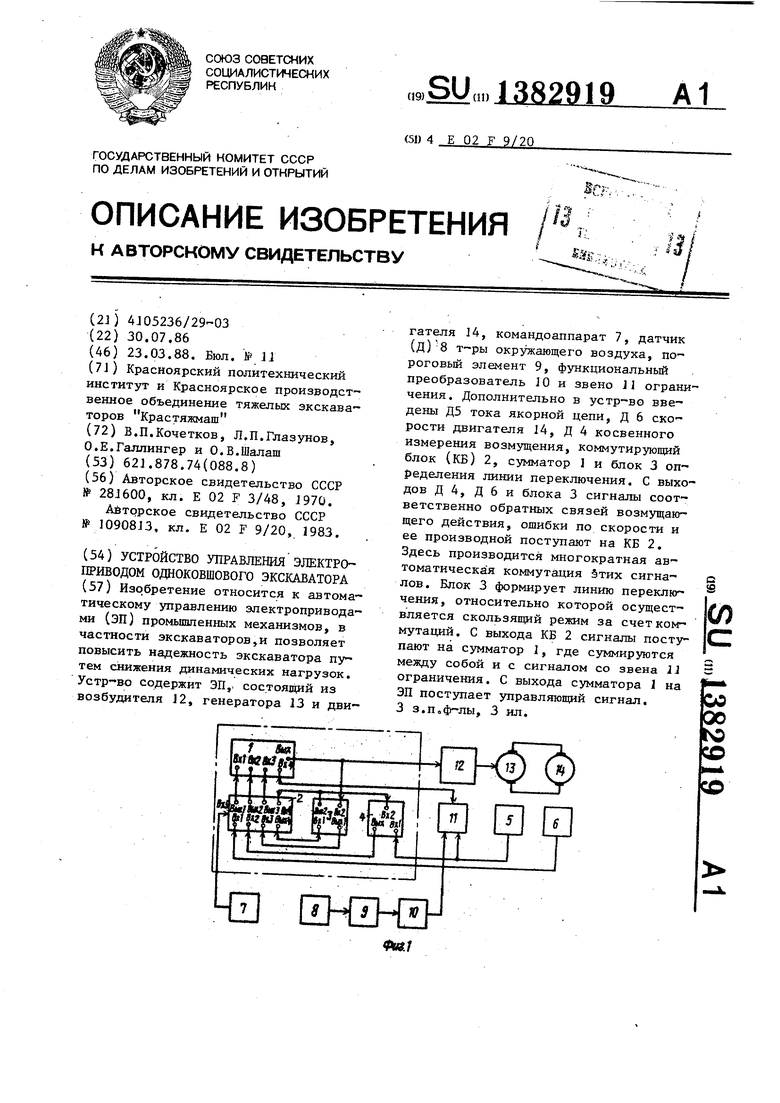
(57)Изобретение относится к автома тическому управлению электроприводами (ЭП) промьшшенных механизмов, в частности экекаваторов,и позволяет повысить надежность экскаватора путем снижения динамических нагрузок. Устр-во содержит ЭП,| состоявщй из возбудителя J2, генератора 13 и двигателя 4, командоаппарат 7, датчик (д) 8 т-ры окружающего воздуха, пороговый элемент 9, функциональный преобразователь JO и звено 11 ограничения. Дополнительно в устр-во введены Д5 тока якорной цепи, Д 6 скорости двигателя 14, Д 4 косвенного измерения возмущения, коммутирующий блок (КБ) 2, сумматор 1 и блок 3 определения линии переключения. С выходов Д 4, Д 6 и блока 3 сигналы соответственно обратных связей возмущающего действия, ошибки по скорости и ее производной поступают на КБ 2. Здесь производится многократная автоматическая коммутация Зтих сигналов. Блок 3 формирует линию переключения, относительно которой осуществляется скользящий режим за счет коммутаций. С выхода КБ 2 сигналы поступают на сумматор 1, где суммируются между собой и с сигналом со звена 11 ограничения. С выхода сумматора 1 на ЭП поступает управляющий сигнал. 3 з.п,ф-лы, 3 ил.
I
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Устройство управления электроприводами копающих механизмов экскаватора | 1986 |
|
SU1511343A1 |
| СТАБИЛИЗИРУЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ СЕТЕВОГО НАПРЯЖЕНИЯ ДЛЯ ЭЛЕКТРОПИТАНИЯ НИЗКОЧАСТОТНОЙ ИМПУЛЬСНОЙ ПЕРИОДИЧЕСКОЙ НАГРУЗКИ | 2011 |
|
RU2457602C1 |
| Устройство для моделированияиМпульСНОгО дАТчиКА чАСТОТы ВРАщЕНия | 1979 |
|
SU849245A1 |
| Электропривод переменного тока | 1984 |
|
SU1164853A1 |
| Устройство для моделирования импульсного датчика частоты вращения | 1985 |
|
SU1251118A2 |
| Цифровой электромагнитный толщиномер | 1988 |
|
SU1839228A1 |
;о
Изобретение относится к управле нию горной техникой, а именно к уп равлению электроприводами главных механизмов одноковшовых экскаваторов, в которых требуется ограничение токов, возникающих в режимах с управляющими и возмущающими воздействиями, и может быть использовано для управ пения электроприводами других промышленных механизмов.
Цель изобретения повышение надежности экскаватора путем снижения динамических нагрузок,
На Hr.J представлена схема устройства управления эле тродриводом одноковшового э сскаватора на фиг,2- принципиал на 1 схема коммутирующего блока; на фиг,3 принципиальная схеПервый вход коммутирующего блока 2 соединен через резистор 31 с инвертирующим входом операционного усилителя 15, в обратную связь которого включен резистор 32, Пятый вход коммутирующего блока 2 через резистор 33 соединен с неинвертирующим входом усилителя 15, Выход усилителя 15, яв10 ляющийся четвертым выходом коммутирующего блока 2, подключен к подвижному контакту ключа 25 и умножителя 22, К размыкающему контакту клкг- ча 25 подключен через резистор 35 не15 инвертирующий вход операционного
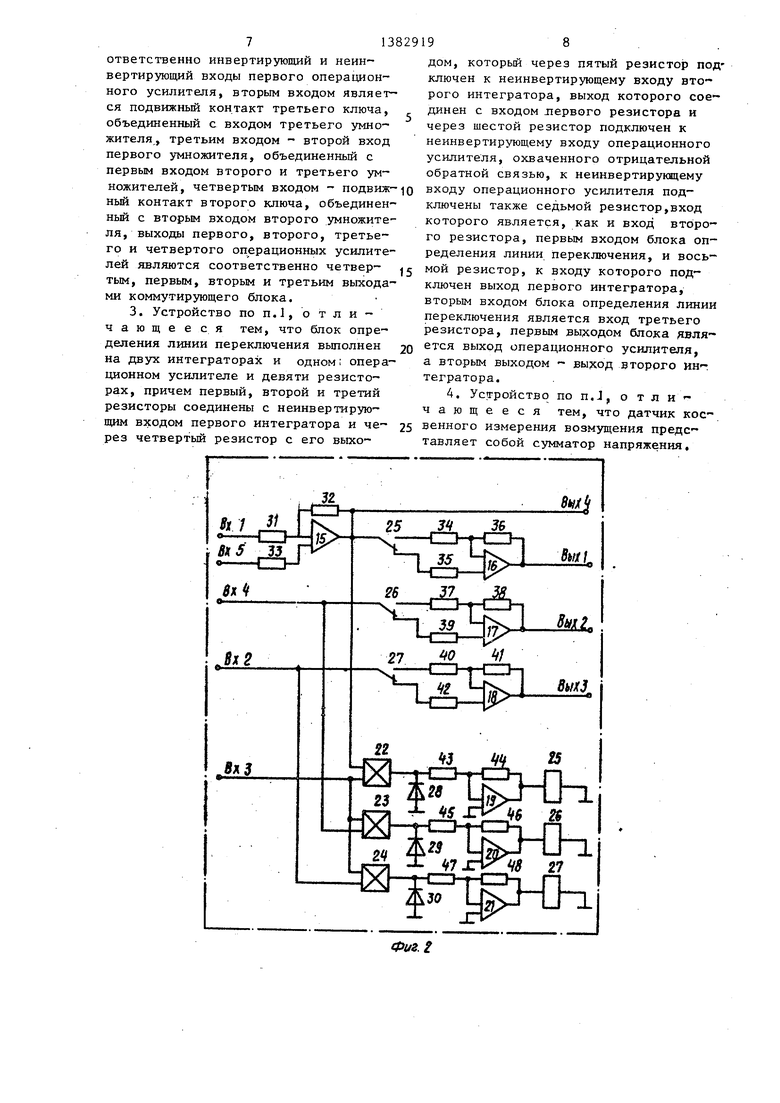
усилителя 16, в обратную связь которого включен резистор 36, К замыкаю щему контакту ключа 25 подключен через резистор 34 инвертирующий вход
ния,
25
30
ма блока определения линии переключе-20 усилителя 16, выход которого являет
ся первым выходом коммутирующего блока 2,
Четвертый вход коммутирующего блока 2 подключен к подвижному кон-™ такту ключа 26 и к входу умножителя 23. К замыкающему контакту ключа 26 присоединен через резистор 37 инвертирующий вход усилителя 17, в обратную связь которого включен резистор 38, Неинвертирующий вход усилителя 17 через резистор 39 подключен к размыкающему контакту ключа 26 , Выход усилителя 17 является вторым выходом коммутирующего блока 2, Вто35 рой вход коммутирующего блока 2 присоединен к подвижному контакту ключа 27 и входу умножителя 24, К замыкающему контакту ключа 27 через резистор 40 подключен инвертирующий
40 вход усилителя 18, в обратную связь которого включен резистор 41, К не- инвертирук)щему входу усилителя 18, выход которого является третьим выходом коммутирующего блока 2 через
45 резистор 42, подсоединен размыкающий контакт ключа 27,
Третий вход коммутирующего блока 2 присоединен к вторым входам умножителей 22-24. К выходу умножителя 22 „подключеныдиод 28и через резистор 43 инвертирующий вход усилителя 19, в обратную связь которого включен резистор 44, а выход через катушку ключа 25 соединен с корпусом,
55 К выходу умножителя 23 подключены диод 29 и через резистор 45 инвертирующий вход усилителя 20, в обратную связь которого включен резистор 46, а выход соединен с корпусом через
Устройство содержит сумматор 1, коммутирующий блок 2, подключенный к первому, второму и третьему входам сумматора 1, блок 3 определения линии переключения, присоединенный к третьему и четвертому входам коммутирующего блока 2 и к датчику 4 косвенного измерения возмущения, подключенного к второму входу коммутирующего блока 2, к датчику косвенного измерения возмущения подключен датчик 5 тока.
Первый и второй входы блока 3 определения линии переключения соединены, соответственно, с четвертым выходом коммутирующего блока 2 и выходом сумматора 1,
Датчик, 6 скорости соединен с первым входом коммутирующего блока 2, к пятому входу которого подсоединен командоаппарат 7. К датчику 8 температуры окружающего воздуха последовательно присоединены пороговый элемент 9, функциональный преобразователь 10, выход которого соединен с первым входом звена 11 ограничения, второй вход которого соединен с датчиком 5 тока, а выход - с четвертым входом сумматора 3, Выход сумматора 1 соединен с электроприводом,включающим возбудитель 12, подсоединенный к генератору 13, к которому подключен двигатель 14.
Коммутирующий блок 2 (фиг,2) состоит из семи операционных усилителей 15-21, трех умножителей 22-24, трех ключей 25-27, трех диодов 28-30 и восемнадцати резисторов 31-48,
50
Первый вход коммутирующего блока 2 соединен через резистор 31 с инвертирующим входом операционного усилителя 15, в обратную связь которого включен резистор 32, Пятый вход коммутирующего блока 2 через резистор 33 соединен с неинвертирующим входом усилителя 15, Выход усилителя 15, являющийся четвертым выходом коммутирующего блока 2, подключен к подвижному контакту ключа 25 и умножителя 22, К размыкающему контакту клкг- ча 25 подключен через резистор 35 неинвертирующий вход операционного
усилителя 16, в обратную связь которого включен резистор 36, К замыкаю щему контакту ключа 25 подключен через резистор 34 инвертирующий вход
25
30
50
катушку ключа 26, К выходу умножителя 24 подключены диод 30 и через резистор 47 инвертирующий вход усилителя 21, в обратную связь которого включен резистор 48, а выход соединен с корпусом через катушку ключа 27. Неинвертирующие входы усилителей J 9 21 и аноды диодов 28,29 соединены с корпусом.
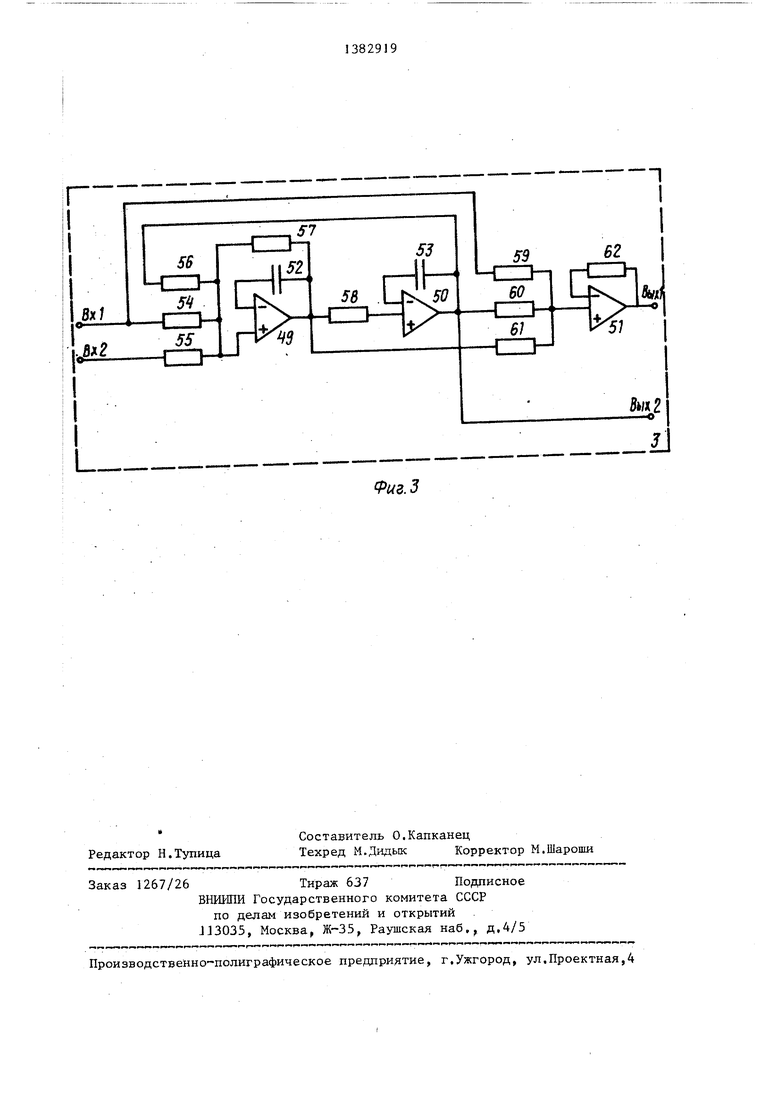
Блок 3 определения линии переключения (фиг.З) состоит из трех операционных усилителей , двух кон денсаторов 52 и 53, включенных в об ратные связ.и усилителей 49 и 50, и девяти резисторов . Неинвертирую щий вход усилителя 49 является вхо- дом блока 3 определения линии пере ключения через резисторы 54 и 55
Выход усилителя 49 присоединен к неинвертирующему входу усилителя 50 через резистор 58 и JK неинвертирую- щему входу усилителя 5J через резистор 6J. К неинэертирующему входу уси35
40
лителя 5J, .в обратную связь которого 25 ит усилителя J8 на противоположный, включен резистор 62, подсоединены также выход усилителя 50 через резистор 60 и первый вход блока 3 определения линии переключения, через резистор 59. Выход усилителя 51 яв- зо ляется выходом блока 3, а вторым выходом - выход усилителя 50.
Датчик 4 косвенного измерения воз- мзтцения представляет собой сумматор напряжений.
Устройство работает следующим образом.
Сигнал с датчика 8 скорости приходит на коммутирующий блок 2, где на усилителе J5 суммируется с задающим сигналом с командоаппарата 7. В результате на выходе усилителя J5 получается ошибка по скорости, которая поступает на усилитель 49 блока 3 определения линии переключения. На усилитель 49 подается также управляющий сигнал с выхода сумматора 1, сигнал второй производной ошибки по скорости, поступающий с вьпсода усилитег- ля 49, и сигнал первой производной ошибки по скорости, поступающий с выхода усилителя 50. Сигнал первой производной ошибки по скорости приходит на усилитель 5|, где с соответств5То- щими коэффихщентами суммируется сиг- 55 нал ошибки по скорости и первой и второй производной ошибки по скорости. На выходе усилителя 51 получает
Таким образом, реализуется алгоритм коммутируемой функи т возмущения
Г okp , при FS 0. V I рр , при FS О На умножитель 22 поступают сигналы линии переключения и ошибки по скорости XY. С умножителя 22 положительный сигнал произведения, усиливаясь усилителем 19, поступает на катушку ключа 25, отркцательньй сигнал замыкается на землю диодом 28. С выхо- усилителя 16 приходит сигнал ошибки по скорости, величина и знак которой коммутируются замыкающими контактами ключа 25 в соответствии с алгоритмом коммутируемой функции ошибки по скорости
.
Го( ,при х S
- О
-(р,при О Величины коэффициентов ошибки по ско45 рости « , и Р) определяются соотношением величин резистора 36 обратной связи и входных резисторов 34 и 35.
На умножитель 23 поступают сигналы линии переключения и производной
50 ошибки по скорости х . С выхода ум-: - ножителя 23 положительный сигнал произведения х,6, усиливаясь усилителем 20, поступает на катушку ключа 26 отрицательный сигнал замыкается на земпю диодом 29. .На втором выходе усилителя J7 формируется сигнал производной ошибки по скорости, величина и знак которой коммутируются замыся сигнал линии переключения S:B
+ х.. с выхода усилите
ля 5J сигнал линии переключения поступает на коммутирующий блок 2. С выхода усилителя 50 сигнал производной ошибки по скорости подается на блок 4 с соответствующим коэффициентом, где сзтФ1ируется с сигналом датчика 5 тока. На выходе блока 4 получается сигнал возмущения F + 1
Q
5
которьй идет на подвижньв1 контакт ключа 27 и умножитель 24. На умножитель 24 подается также сигнал линии переключения с блока 3. С выхода умножителя 24 сигнал произведения, усиливаясь усилителем 2J, поступает на катушку ключа 27, причем на усилитель 21 приходит только положитель- 0 ный сигнал, так как отрицательный замыкается на землю диодом 30, ера- батьгоая при положительном произведении сигналов возмущения и линии переключения, ключ 27 изменяет козффици5
0
ит усилителя J8 на противоположный, о
5
Таким образом, реализуется алгоритм коммутируемой функи т возмущения
Г okp , при FS 0. V I рр , при FS О На умножитель 22 поступают сигналы линии переключения и ошибки по скорости XY. С умножителя 22 положительный сигнал произведения, усиливаясь усилителем 19, поступает на катушку ключа 25, отркцательньй сигнал замыкается на землю диодом 28. С выхо- усилителя 16 приходит сигнал ошибки по скорости, величина и знак которой коммутируются замыкающими контактами ключа 25 в соответствии с алгоритмом коммутируемой функции ошибки по скорости
.
Го( ,при х S
- О
-(р,при О Величины коэффициентов ошибки по ско5 рости « , и Р) определяются соотношением величин резистора 36 обратной связи и входных резисторов 34 и 35.
На умножитель 23 поступают сигналы линии переключения и производной
0 ошибки по скорости х . С выхода ум-: - ножителя 23 положительный сигнал произведения х,6, усиливаясь усилителем 20, поступает на катушку ключа 26, отрицательный сигнал замыкается на земпю диодом 29. .На втором выходе усилителя J7 формируется сигнал производной ошибки по скорости, величина и знак которой коммутируются замыф,
кающим и размыкаюпщм контактами клю ча 26 в соответствии с алгоритмом коммутируемой функции производной ошибки по скорости
Ы.5 , при о , при i. О
Величины коэффициентов производной ошибки по скорости сА „ и (3 оп ределяются соотношением величин резистора 38 обратной связи и входных резисторов 37 и 39.
С выходов усилителей 16-18 сигналы поступают на сумматор, на которьш поступает также сигнал fco звена 11 ограничения, величина которого зависит от тока якоря и температуры окружающего воздуха. При низкой температуре сигнал с датчика 8 температуры окружающего воздуха превышает ограни ченное напряжение порогового элемента 9 и на выходе последнего появляется напряжение, поступающее на вход функционального преобразователя 10. Последний вырабатывает по алгоритму напряжение, подающееся на звено JJ ограничения, которое определяет величину токовой отсечки. С выхода сумматора 1 сигнал управления поступает на электропривод.
Положительный эффект изобретения состоит в том, что предлагаемая система переменной структуры, осуществ- ляюш,аз многрдратную }сом 1ута11,ию сигналов возмущающего воздействия ошиб- си по скорости и ее дроизводной, в тяжелых режима работы копающих механизмов обеспечивает снижение коэффициента динамичности механизмов на 20-30%.
Формула изобретения
15
- 20
25
с3829196
венного измерения возмущения, причем выход датчика скорости двигателя соединен с первым входом коммутирующего блока, выход датчика тока якорной цепи соединен с вторым входом звена ограничения и с первым входом датчика косвенного измерения возмущения, выход которого подключен к второму входу коммутирующего блока, первьм и второй выходы блока определения линии переключения соединены соответственно с третьим и четвертым входами коммутирующего блока, с пятым входом последнего соединения командоаппарат, второй выход блока определения линии переключения подключен также ко второму входу датчика косвенного измерения возмущения, первьй, второй и третий выходы коммутирующего блока соеди нены соответственно с первым, вторым и третьим входами сумматора, а выход звена ограничения подключен к четвертому входу сумматора, выход которого соединен с блоком определения линии . переключения электродвигателем.
35
40
45
50
55
Фиг. 2
Фиг.З
