te: Лг
i ±25
IILMJ
сд
00
&9
IПЛ I-ZIZTI 7 V
.ИЩ И и ЙЙ гт1
te: Лг LL
i ±25
3151
Изобретение относится к упраВо:.ению горной техникой, а именно к управлению электроприводами механизмов одноковшовых экскаваторов, в которых требуется ограничение токов, воэникаю- вщх в режимах с управляющими и возмущающими воздействиями,, и может быть использовано для управления электроприводами других промышленных меха- низмов.
Целью изобретения является повышение надежности работы экскаватора путем снижения динамических нагрузок.
На чертеже представлена схема уп- равления электроприводами напора и подъема.
Устройство содержит последовательно соединенные командоконтроллер 1 и сумматор 2, на входы которого по- ступают сигналы с первого порогового элемента 3, регулятор 4 обратной связи по току и регулятор 5 обратной связи по скорости. Ключ 6 осуществля™
входом сумматора 20 и через размыкающий контакт 21, усилитель 22 по управлению соединен с вторьи входом сумматора 20, выход которого является выходом регулятора 4 обратной связи по току и соединен с третьим входом сумматора 2. Вход регулятора 5 обратной связи по скорости через замыкающий контакт 23, усилитель 24 по возмущению соединен с первым входом сумматора 25 и через размыкающий контакт 26, усилитель 27 по управлению соединен и связан с вторым входом сумматора 25, выход которого являетс выходом регулятора 5 обратной связи по скорости и соединен с четвертым входом первого сумматора 2,
Управление осуществляется следующим образом,
В датчике 11 тока нагрузки осуществляется косвенное измерение тока нагрузки. Сигнал скорости с выхода датчика 10 скорости дифференцируется
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Устройство управления электроприводами эскаватора | 1986 |
|
SU1432150A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1382919A1 |
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| Устройство для управления экскаватором типа "прямая лопата | 1983 |
|
SU1113490A1 |
| Способ управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1989 |
|
SU1671801A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1420127A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
Изобретение относится к управлению горной техникой и предназначено для управления электроприводами механизмов одноковшовых экскаваторов и др.пром. механизмов. Цель - повышение надежности экскаватора путем снижения динамических нагрузок. Для этого устройство содержит сумматоры 2, пороговые элементы /ПЭ/ 3,13, датчики /Д/ 12 и 14 т-р электродвигателей напора 8 и подъема, полного тока 9, скорости 10 и тока нагрузки 11, регуляторы тока 4 и скорости 5, тиристорный преобразователь 7, командоконтроллер 1 и ключ 6, осуществляющий коммутацию регуляторов 4 и 5. Сигналы с выходов Д 9 и 10 поступают на входы Д 11, где косвенно определяется ток нагрузки. При изменении тока нагрузки ключ 6 коммутирует обратные связи по току якорной цепи и скорости двигателя напора, образуя систему с переменной структурой. При перегреве одного из приводов сигнал с соответствующего Д 12 или 14 т-ры превышает ограничивающее напряжение ПЭ 13. На его выходе появляется напряжение, поступающее на ПЭ 3, т.е. уменьшается ток отсечки и среднеквадратичный ток перегреваемого привода. 1 ил.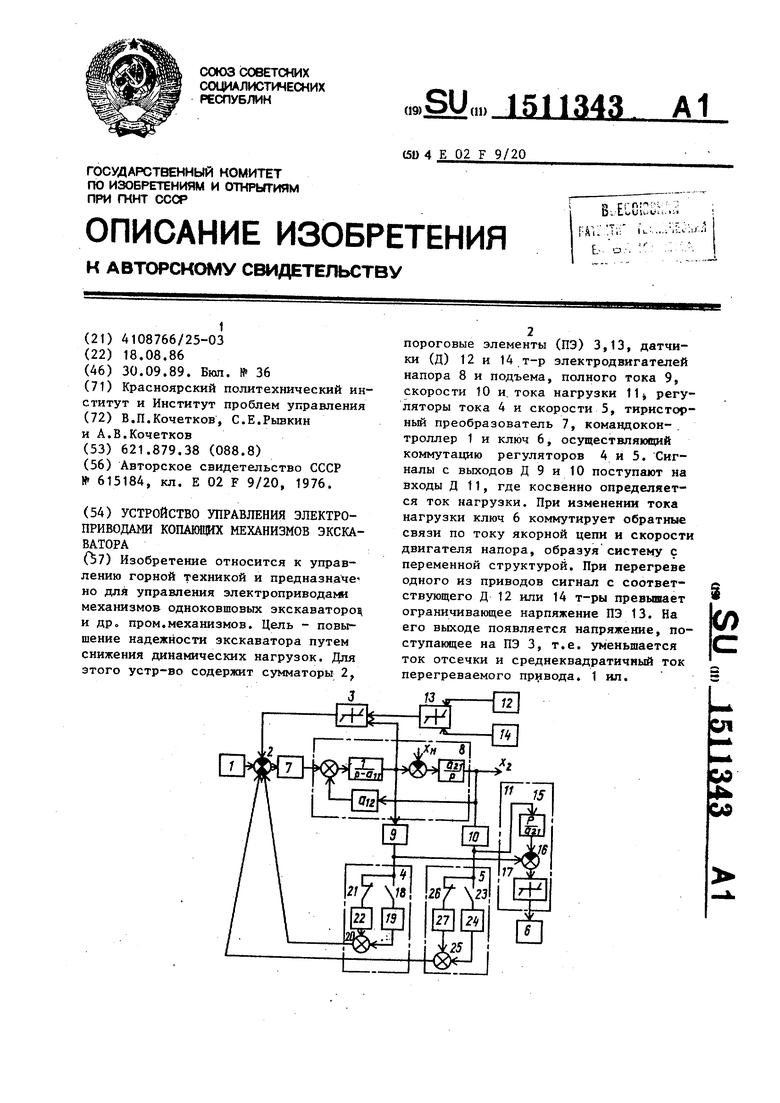
ет коммутацию обратных связей по току 25 и инвертируется в дифференциаторе 15
якорной цепи и скорости двигателя напора о К управляющему преобразователю 7 присоединен двигатель 8 напора. Выходы датчиков 9 тока и скорости 10 присоединены соответственно к регуляторам обратной связи по току 4 и скорости 5, к датчику 11 тока нагрузки. Выход датчика 11 тока нагрузки подсоединен к ключу 6. Датчик 12 температуры электродвигателя напора подключен к первому входу второго порогово го элемента 13, второй вход которого соединен с выходом датчика 14 температуры привода подъема, а выход второго порогового элемента 13 соединен с первым входом первого порогового элемента 3, второй вход которого сое- динен с выходом датчика 9 тока,. Датчик 11 тока нагрузки реализуется на инвертирующем дифференциаторе 15, вход которого соединен с выходом датчика 10 скорости, а выход с первым входом сумматора 16, второй вход которого соединен с вьпсодом датчика 9 тока. Выход сумматора 16 соединен с входом нелинейного элемента 17, выход которого является выходом датчика 11 тока нагрузки.
Регуляторы 4, 5 обратной связи по току и скорости состоят из двух инвертирующих усилителей. Вход регулятора 4 обратной связи по току через замыкающий контакт 18, усилитель 19 тока по возмущению соединен с первым
0
5
Q
0
5
затем сумьдаруется с сигналом тока якорной цепи с выхода датчика 9 тока. Текущее значение тока нагрузки срав- нивается с заданным значением в нелинейном элементе 17 При превы-- шении заданного значения тока нагрузки включается ключ 6, замыкаются его замыкающие контакты 1.8 и 23 и сигнал обратной связи по току с выхода датчика 9 тока проходит через усилитель 19 тока по возмущению а сигнал обратной связи по скорости с выхода датчика 10 скорости проходит через усилитель 24 обратной связи по скорости при возмущающем воздействии. Если ток нагрузки -не превышает заданного значения, ключ 6 отключается и замыкаются ел о размыкающие контакты 21 и 26 .и сигнал обратной связи по току с выхода датчика 9 тока проходит через усилитель 22 тока по управлению, а сигнал обра-Гной связи по скорости с выхода датчика 10 скорости проходит через усилитель 27 обратной связи по скорости при управляющем воздействии. Таким образом получается система с переменной структурой. При перегреве одного из приводов сигнал с соответствующего датчика температуры превышает ограничивающее напряжение второго порогового элемента 13, при этом на его выходе появляется напряжение, поступающее в первый пороговый элемент 3 . уменьшается
.15
ток отсечки, уменьшается среднеквадратичный ток перегреваемого привода
Устройство позволяет осуществлять оптимальную настройку обратных связей, исходя из заданного критерия по управляющему и возмущающему воздействию
Формула изобретения
Устройство управления электроприводами копающих маханизмов экскаватора, включающее командоконтроллер, ти- ристорный преобразователь, выход которого подключен в якорную цепь электродвигателя механизма напора, датчики температ ур электродвигателей подъема и напора, соединенные соответственно с первым и вторым входами первого порогового элемента, о т л и- чающееся тем, что, с целью повышения надежности работы экскаватора, оно снабжено сумматором, вторым пороговым элементом, датчиками полного тока, скорости и тока нагрузки, регуляторами тока и скорости, ключом, причем выход командоконтроллера соединен с первым входом сумматора, выход которого соединен с входом тирис- торного преобразователя, выход первого элемента соединен с первым входом второго порогового элемента, второй вход которого соединен с выходом дат0
5
13436
чика полного тока, выход второго порогового элемента соединен с вторым
1ВХОДОМ сумматора, выход датчика полного тока через регулятор обратной связи по току соединен с третьим входом сумматора, выход дйтчика скорости через регулятор обратной связи по скорости соединен с четвертым входом сумматора, выход датчика полного тока соединен с первым входом датчика тока нагрузки, второй вход которого соединен с выходом датчика скорости, а выход датчика тока нагрузки соединен с управляющим входом исполнительного реле, регуляторы обратных связей по току и скорости содержат замыкающие и размыкающие контакты испытательного реле, два усилителя и сумматор, при0 чем вход регулятора через эамьжающий контакт реле и первый усилитель соединен с первым входом сумма тора и через размыкающий контакт реле и второй усилитель и с вторым входом суммато5 ра, выход которого является выходом регулятора, датчик тока нагрузки состоит из дифференциатора, порогового элемента и сумматора, первый вход которого является первым входом датчиQ ка, а второй вход датчика через дифференциатор связан с вторым входом сумматора, выход которого через нелинейный элемент соединен с выходом датчика тока нагрузки.
| Способ управления электроприводами одноковшового экскаватора | 1976 |
|
SU615184A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
