Щиг.1
Группа изобретений - способ и устройство, объединенные единым изобретательским замыслом, относится к области управления механизмами поворота экскаваторов и может быть использовано для управления механизмами других промышленных установок, в которых требуется ограничивать динамические нагрузки механизмов.
Известен способ ограничения динамических нагрузок в экскаваторных механизмах, основанный на выборе зазоров, когда осуществляется плавное нарастание момента при пониженной скорости двигателя, при этом первоначальные броски динамических нагрузок при пуске и реверсе уменьшаются в 2-3 раза. Однако этот способ увеличивает длительность цикла экскавации на (2-3)% и, кроме того, он ограничивает нагрузки только в процессе выбора зазора.
Известно устройство для управления электроприводом экскаватора, обеспечивающее ограничение динамических нагрузок в экскаваторных механизмах Оно реализует двухконтурную систему подчиненного регулирования и содержит регуляторы тока и скорости, датчика тока и скорости, коман- доаппарат, триггер, ключ, релейный элемент, инвертор, источник питания. К недостаткам устройства относится снижение темпа разгона на период выбора зазора, что вызывает увеличение продолжительности цикла поворота и приводит к снижению производительности экскаватора.
Известно также устройство управления электроприводом механизма поворота одноковшового экскавато ра, включающее в себя регуляторы тока и скорости, коммутатор, триггер, ключ, релейный элемент, инвертор и источник питания. Оно также снабжено датчиком упругого момента, блоком памяти, блоком задания и суммирующим усилителем, причем блок памяти выполнен в виде последовательного соединения ключа и инвертора, в цепь обратной связи которого включены конденсаторы. Однако при выборе зазора ограничиваются только первые броски динамических усилий-, а дальнейшие броски, которые возникают из-за неравномерности износа шестерен многодвигательных приводов, не устраняются, что приводит к снижению производительности и надежности экскаватора.
Наиболее близким к заявляемому способу является способ ограничения динамических нагрузок механизмов поворота экскаватора, согласно которому при выборе
зазора снижают скорость двигателя до (2- 3)% от номинальной за счет ограничения темпа нарастания задающего сигнала скорости с помощью задатчика интенсивности
изменения скорости поворота экскаватора, включаемого на вход системы автоматического управления, а после выбора зазора автоматически изменяют темп скорости за счет введения гибких отрицательных обратных связей.
Наиболее близким техническим решением к предложенному устройству является устройство для управления электроприводом механизма поворота одноковшового
экскаватора 5, содержащее датчика тока якорной цепи электродвигателя электропривода и скорости электродвигателя, коммутирующий блок, блок определения линии переключения, датчик косвенного измерения возмущения, сумматор, звено ограничения и командоаппарат. Оно также снабжено датчиком температуры окружающего воздуха, пороговым элементом, функциональным преобразователем.
Недостатком этого устройства является недостаточное ограничение динамических нагрузок механизма поворота экскаватора из-за постоянства ограничения тока якорной цепи электродвигателя его стопорным
значением.
Единый изобретательский замысел, объединяющий способ и устройство для его реализации, направлен на решение задачи ограничения динамических нагрузок механизма поворота экскаватора в тех случаях, когда эту задачу невозможно решить на основе аналогичных решений для ограничения динамических нагрузок, возникающих при выбранном зазоре из-за неравномерного износа шестерен, что повышает повышение производительности экскаватора за счет уменьшения времени переходного процесса и внеплановых простоев,
Особенность данного сочетания заявляемых объектов состоит в том, что предлагаемый способ ограничения не может быть осуществлен ни в одном из известных устройств, и необходимый результат может быть достигнут при реализации нового
способа только в новом, существенно отличающемся от известных, устройстве, предложенном авторами.
У группы изобретений одна цель, и на ее достижение направлен единый изобретательский замысел.
Цель изобретения - повышение производительности экскаватора за счет уменьшения времени переходного процесса и сокращения времени простоев
Поставленная цель достигается за счет того, что в способе ограничения динамических нагрузок механизма поворота экскаватора, основанном на задании и контроле скорости поворота экскаватора, по которым определяют сигнал ошибки по скорости, и измерении тока якорной цепи электродвигателя дополнительно формируют сигнал возмущения, задают и вычисляют значение ускорения поворота, по которым определя- ют сигнал значения ошибки ускорения поворота, по этому сигналу и сигналу ошибки по скорости формируют сигнал переключения, знак которого сравнивают со знаками сигналов ошибок по скорости и ускорению поворота и знаком сигнала возмущения, в зависимости от соотношений знаков указанных сигналов определяют коэффициент усиления в цепях обратных связей по скорости и ускорению поворота и возмущению, с помощью которых формируют сигнал управления на электропривод.
Поставленная цель в реализующем предложенный способ устройстве достигается новым конструктивным выполнением устройства управления электроприводом.
В предложенном устройстве для ограничения динамических нагрузок механизма поворота экскаватора, содержащем коман- доаппарат, первый сумматор, датчик тока и датчик косвенного измерения возмущения, поставленная цель достигается тем, что оно дополнительно снабжено задатчиком интенсивности изменения скорости поворота, датчиком упругого момента, датчиком ско- рости поворота, вторым сумматором, формирователем сигнала переключения и блоком управления, выход которого подключен к первому входу преобразователя и к первому входу формирователя сигнала пе- реключения, выход которого соединен с первым входом блока управления, второй вход блока управления соединен с выхо- дом второго сумматора и со вторым входом формирователя сигнала переключения, к третьему входу которого подключен выход первого сумматора, первый вход датчика косвенного измерения возмущения и третий вход блока управления, четвертый вход блока управления соединен с выходом дат- чика косвенного измерения возмущения, второй вход которого соединен с первым выходом датчика упругого момента, ко второму выходу которого подсоединен первый вход первого сумматора, второй вход по- следнего соединен с выходом командоаппа- рата и со входом задатчика интенсивности изменения скорости поворота, выход которого соединен с первым входом второго сумматора, второй вход которого соединен
с выходом датчика скорости поворота и с первьяи входом датчика упругого момента, ко второму входу которого подсоединены второй вход управляемого преобразователя и выход датчика тока якорной цепи электродвигателя.
Благодаря совокупности указанных существенных признаков в заявленных объектах появляются новые свойства:
-инвариантность воспроизведения управляющего воздействия при изменениях внешних и внутренних возмущающих воздействий;
-устранение колебаний упругого момента.
Именно перечисленные свойства обуславливают положительный эффект, сформулированный в цели предложения. Авторам не известны технические решения, содержащие такую совокупность отличительных признаков и проявляющие при этом те же свойства, что и предлагаемые технические решения, т.е. заявляемые технические решения, соответствует критерию существенные отличия.
Сущность изобретения состоит в том, что в предложенном техническом решении производится настройка параметров формирователя функции переключения и блока управления, исходя из условия обеспечения в скользящем режиме, во-первых, независимого от внешних и внутренних возмущений воспроизведения управляющего воздействия и, во-вторых, устранения колебаний упругого момента б.
Инвариантность отработки управляющего воздействия при изменении внешних и внутренних возмущений обеспечивается путем обнуления в скользящем режиме функции переключения, которая формируется по ошибке скорости поворота xi с&г - ш и ее производным ха dxi/dt, хз dxa/dt, X4 dx3/dt
S С1Х1 + С2Х2 + СЗХЗ + Х4,(1)
где Сч, Сз, Сз - весовые коэффициенты, выбираемые из условия устранения в скользящем режиме колебаний упругого момента путем обеспечения устойчивого оптимального движения с критерием
l C22x22)dt,
о
и являющиеся решениями системы уравнений и неравенств
С2 - Сз2 + - аз О
С1 + Сз-С2- 1 0
(2)
С2С3 С1
Ctii - заданная скорость поворота экскаватора, ш - фактическая скорость поворота, аз, 34 - коэффициенты координат объекта уп- равлехия.
Для этого на выходе управляющего устройства формируется сигнал управления равный
U К1Х1+ К2Х2 - kpF,(3)
коэффициенты которого изменяются последующему закону:
ki-fe fJS.«)
а при xi S О р2 при xi S 0
аг при ха S О |/fc при Х2 S 0
, ГОГР при FS О KF j/fr при F S 0
К2
(5)
(6)
и их величина:
«1(СзС1 -a4d+ ai)/b , /5i(CaCi - a4Ci+ ai)/b, а2(- Ci+ С2Сз - Э4С2 - 32)/b,
#(- Cl+ C2C3 - Э4С2+ Э2)/Ь,
ар - di+ d2A + ds(A2+ A) + d4(A3+ 2A2+ A)/b,
- di-d2A + d3(A2 - A) + d4(- A3 +2A2- -A)/b,
где ai, 32 - коэффициенты координат объекта, b - коэффициент управляющего воздействия, di. d2, da, d4 - коэффициенты при возмущении и его производных, F - возмущение, А |dmF/dtl/l Xd F/dt
A-const.
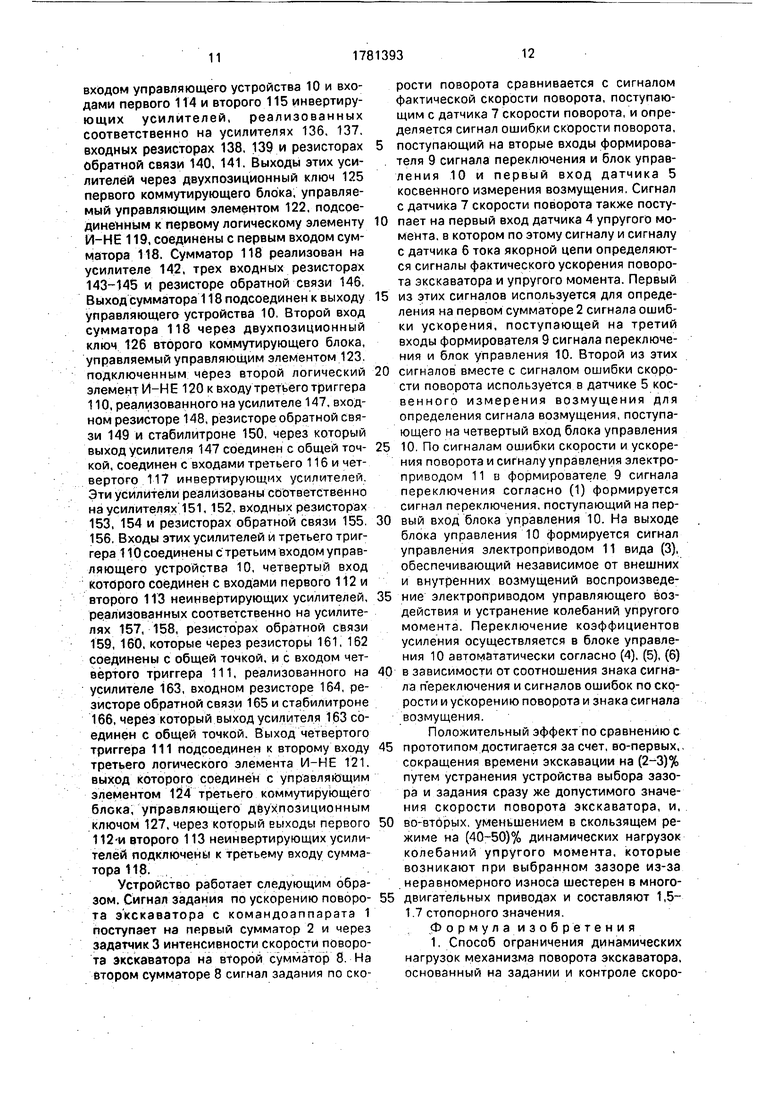
На фиг.1 дана функциональная схема устройства для ограничения динамических нагрузок механизма поворота экскаватора: на фиг.2 - принципиальная схема датчика упругого момента; на фиг.З - принципиальная схема датчика косвенного измерения возмущения; на фиг.4 - принципиальная схема формирователя сигнала переключения; нафиг.5- принципиальная схема блока управления.
Устройство содержит (фиг.1) командо- аппарат 1, к выходу которого подсоединен второй вход первого сумматора 2 и вход задатчика 3 интенсивности изменения скорости поворота. К первому входу первого сумматора 2 подсоединен второй выход датчика 4 упругого момента, первый выход которого подсоединен к второму входу датчика 5 косвенного измерения возмущения. Второй вход датчика 4 упругого момента соединен с выходом датчика 6 тока якорной цепи Первый вход датчика 4 упругого момента соединен с выходом датчика 7 скорости поворота и вторым входом второго
сумматора 8, первый вход которого подсоединен к выходу задатчика 3 интенсивности. Выход второго сумматора 8 подсоединен к вторым входам формирователя 9 сигнала
переключения и блока управления 10. Третий вход блока управления 10 связан с выходом пеового сумматора 2, первым входом датчика 5 косвенного измерения возмущения и третьим входом формирователя 9 сигнала
переключения. К первому входу блока управления 10 подсоединен выход формиро-- вателя 9 сигнала переключения, а к четвертому входу - выход датчика 5 косвенного измерения возмущения. Выход блока
управления 10 соединен с первым входом формирователя 9 сигнала переключения и первым входом регулируемого электропривода 11, содержащего управляемый преобразователь 12 и электродвигатель
постоянного тока 13. К второму входу регулируемого электропривода 11 подсоединен датчик 6 тока якорной цепи.
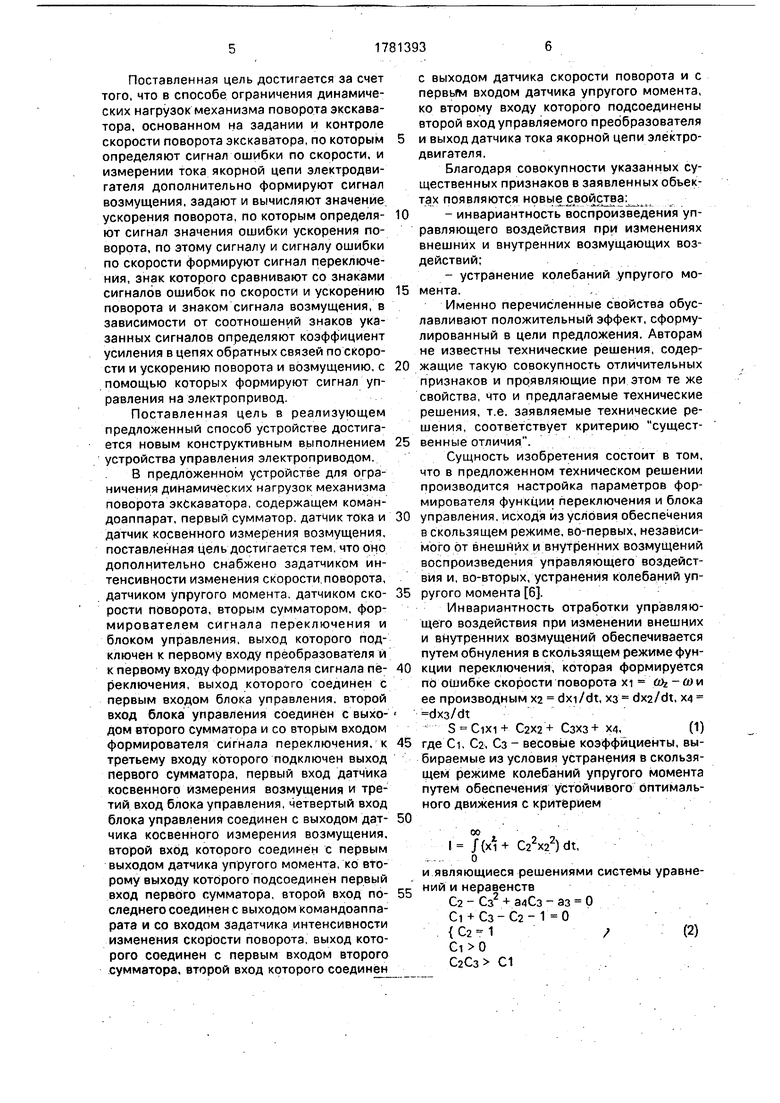
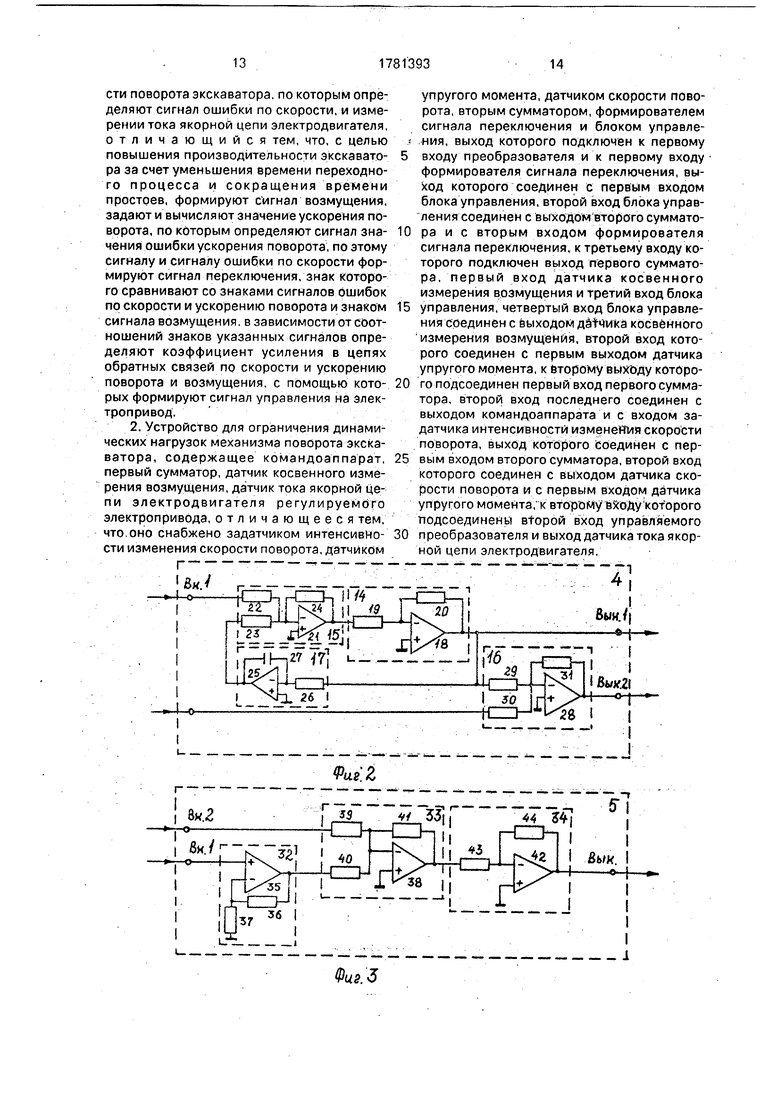
Датчик 4 упругого момента содержит
(фиг.2) из инвертирующий усилитель 14 два сумматора 15, 16, интегратор 17. Инвертирующий усилитель 14 реализован на усилителе 18, входном резисторе 19 и резисторе обратной связи 20. Вход инвертирующего
усилителя 14 подсоединен к выходу первого сумматора 15, реализованного на усилителе 21, входных резисторах 22, 23, резисторе обратной связи 24. Первый вход первого сумматора 15 соединен с первым входом
датчика 4 упругого момента, второй вход первого сумматора 15 - с выходом интегратора 17, реализованного на усилителе 25, во входную цепь которого включен резистор 26, а в цепь обратной связи - конденсатор
27. Вход интегратора 17 соединен с выходом инвертирующего усилителя 14, с первым выходом датчика 4 упругого момента и с первым входом второго сумматора 16, реализованном на усилителе 28, входных резисторах 29, 30, резисторе обратной связи 31. Второй вход второго сумматора 16 соединен с вторым входом датчика упругого момента 4, а выход второго сумматора 16 - с вторым входом датчика упругого момента
4.
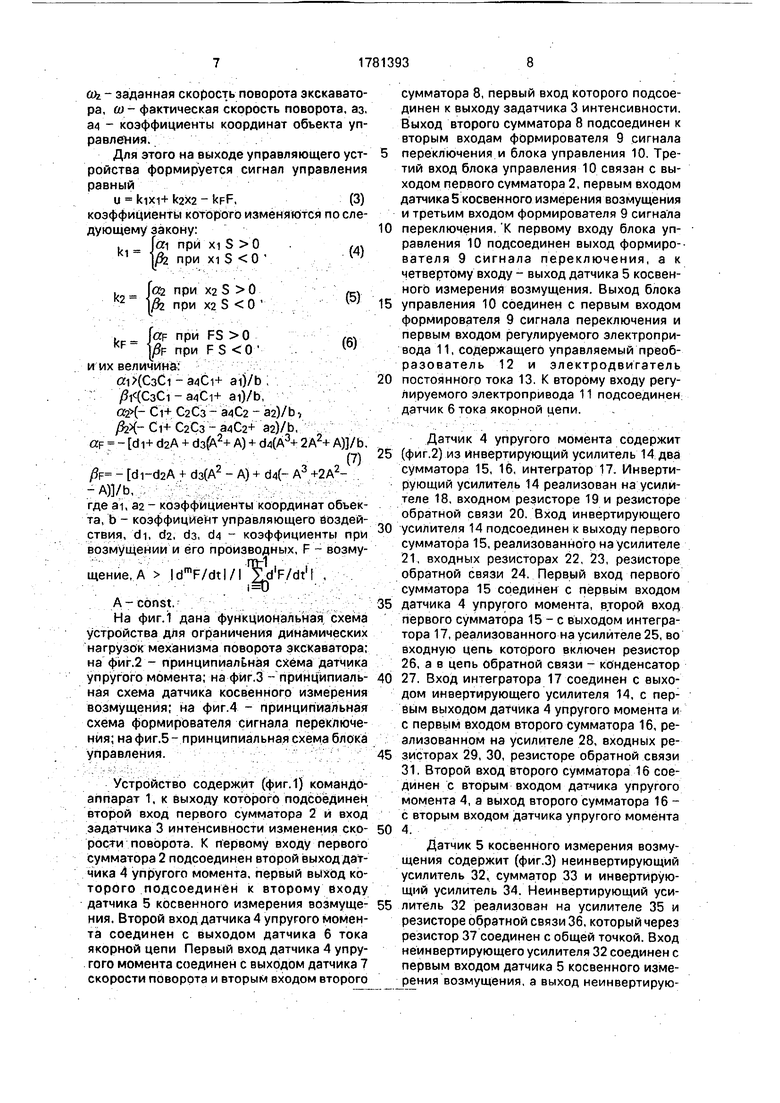
Датчик 5 косвенного измерения возмущения содержит (фиг.З) неинвертирующий усилитель 32, сумматор 33 и инвертирующий усилитель 34. Неинвертирующий усилитель 32 реализован на усилителе 35 и резисторе обратной связи 36, который через резистор 37 соединен с общей точкой. Вход неинвертирующего усилителя 32 соединен с первым входом датчика 5 косвенного изме- рения возмущения, а выход неинвертирующего усилителя 32 - с первым входом сумматора 33. Сумматор 33 реализован на усилителе 38, входных резисторах 39, 40, резисторе обратной связи 41. Второй вход сумматора 33 соединен с вторым входом датчика 5 косвенного 10 измерения возмущения, а выход сумматора 33 - с входом инвертирующего усилителя 34. Инвертирующий усилитель 34 реализован на усилителе 42, входном резисторе 43 и резисторе обратной связи 44. Выход инвертирующего усилителя 34 соединен с выходом датчика 5 косвенного измерения возмущения.
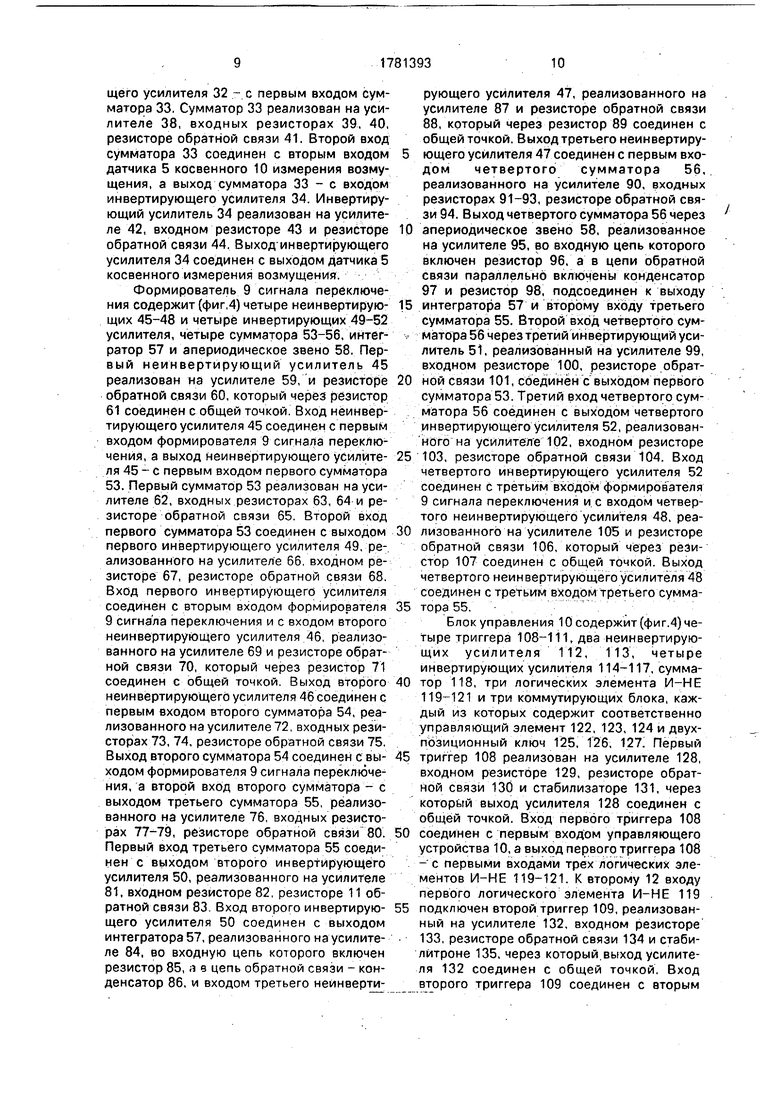
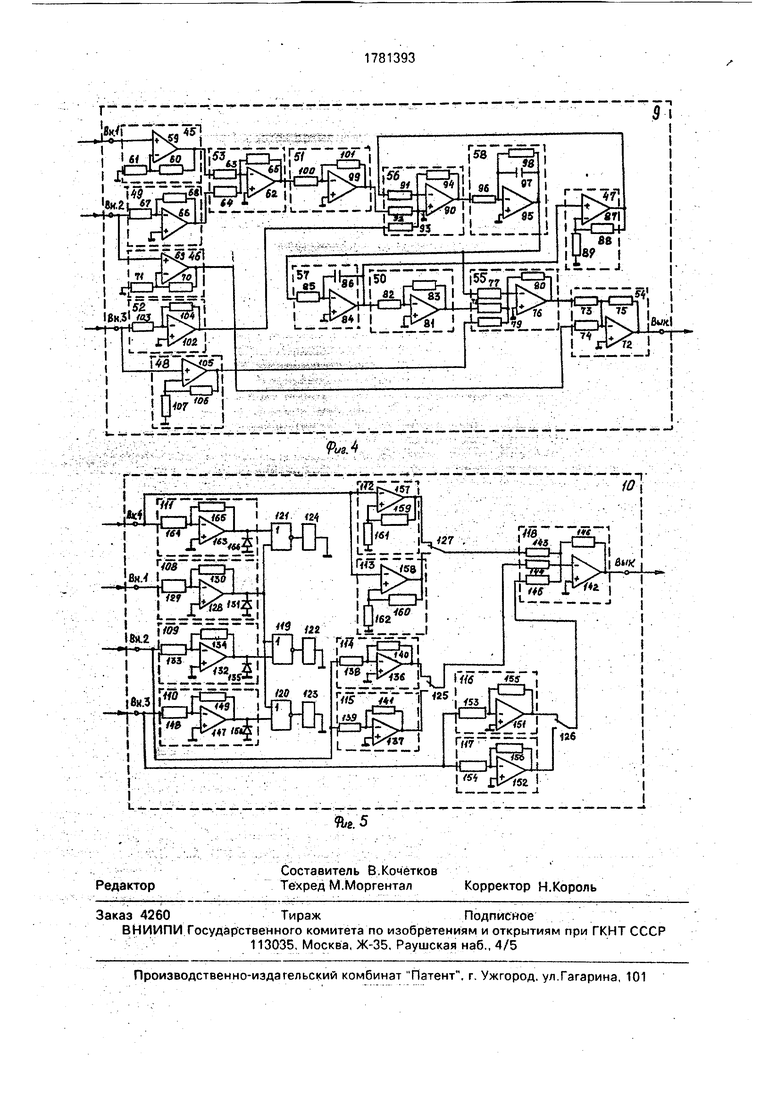
Формирователь 9 сигнала переключения содержит (фиг,4) четыре неинвертирую- щих 45-48 и четыре инвертирующих 49-52 усилителя, четыре сумматора 53-56, интегратор 57 и апериодическое звено 58. Первый неинвертирующий усилитель 45 реализован на усилителе 59, и резисторе обратной связи 60, который через резистор 61 соединен с общей точкой. Вход неинвертирующего усилителя 45 соединен с первым входом формирователя 9 сигнала переключения, а выход неинвертирующего усилите- ля 45 - с первым входом первого сумматора 53. Первый сумматор 53 реализован на усилителе 62, входных резисторах 63, 64 и резисторе обратной связи 65. Второй вход первого сумматора 53 соединен с выходом первого инвертирующего усилителя 49, реализованного на усилителе 66 входном резисторе 67, резисторе обратной связи 68. Вход первого инвертирующего усилителя соединен с вторым входом формирователя 9 сигнала переключения и с входом второго неинвертирующего усилителя 46, реализованного на усилителе 69 и резисторе обратной связи 70, который через резистор 71 соединен с общей точкой Выход второго неинвертирующего усилителя 46 соединен с первым входом второго сумматора 54, реализованного на усилителе 72, входных резисторах 73, 74, резисторе обратной связи 75. Выход второго сумматора 54 соединен с вы- ходом формирователя 9 сигнала переключения, а второй вход второго сумматора - с выходом третьего сумматора 55, реализованного на усилителе 76, входных резисторах 77-79, резисторе обратной связи 80. Первый вход третьего сумматора 55 соединен с выходом второго инвертирующего усилителя 50, реализованного на усилителе 81, входном резисторе 82, резисторе 11 обратной связи 83 Вход второго инвертирую- щего усилителя 50 соединен с выходом интегратора 57, реализованного на усилителе 84, во входную цепь которого включен резистор 85, .1 в цепь обратной связи - конденсатор 86, и входом третьего неинвертирующего усилителя 47, реализованного на усилителе 87 и резисторе обратной связи 88, который через резистор 89 соединен с общей точкой. Выход третьего неинвертирующего усилителя 47 соединен с первым входом четвертого сумматора 56, реализованного на усилителе 90, входных резисторах 91-93, резисторе обратной связи 94. Выход четвертого сумматора 56 через апериодическое звено 58, реализованное на усилителе 95, во входную цепь которого включен резистор 96, а в цепи обратной связи параллельно включены конденсатор 97 и резистор 98, подсоединен к выходу интегратора 57 и второму входу третьего сумматора 55. Второй вход четвертого сумматора 56 через третий инвертирующий усилитель 51. реализованный на усилителе 99, входном резисторе 100, резисторе обратной связи 101, соединен с выходом первого сумматора 53. Третий вход четвертого сумматора 56 соединен с выходом четвертого инвертирующего усилителя 52, реализованного на усилителе 102, входном резисторе 103, резисторе обратной связи 104. Вход четвертого инвертирующего усилителя 52 соединен с третьим входом формирователя 9 сигнала переключения и с входом четвертого неинвертирующего усилителя 48, реализованного на усилителе 105 и резисторе обратной связи 106, который через резистор 107 соединен с общей точкой. Выход четвертого неинвертирующего усилителя 48 соединен с третьим входом третьего сумматора 55.
Блок управления 10 содержит (фиг.4) четыре триггера 108-111, два неинвертирующих усилителя 112, 113, четыре инвертирующих усилителя 114-117, сумматор 118, три логических элемента Й-НЕ 119-121 и три коммутирующих блока, каждый из которых содержит соответственно управляющий элемент 122, 123, 124 и двух- позиционный ключ 125. 126, 127. Первый триггер 108 реализован на усилителе 128, входном резисторе 129, резисторе обратной связи 130 и стабилизаторе 131, через который выход усилителя 128 соединен с общей точкой. Вход первого триггера 108 соединен с первым входом управляющего устройства 10, а выход первого триггера 108 - с первыми входами трех логических элементов И-НЕ 119-121. К второму 12 входу первого логического элемента И-НЕ 119 подключен второй триггер 109, реализованный на усилителе 132, входном резисторе 133, резисторе обратной связи 134 и стабилитроне 135, через который выход усилителя 132 соединен с общей точкой. Вход второго триггера 109 соединен с вторым
входом управляющего устройства 10 и входами первого 114 и второго 115 инвертирующих усилителей, реализованных соответственно на усилителях 136. 137. входных резисторах 138, 139 и резисторах обратной связи 140, 141. Выходы этих усилителей через двухпозиционный ключ 125 первого коммутирующего блока, управляемый управляющим элементом 122. подсоединенным к первому логическому элементу И-НЁ 119, соединены с первым входом сумматора 118. Сумматор 118 реализован на усилителе 142, трех входных резисторах 143-145 и резисторе обратной связи 146. Выход сумматора 118 подсоединен к выходу управляющего устройства 10. Второй вход сумматора 118 через двухпозиционный ключ 126 второго коммутирующего блока, управляемый управляющим элементом 123. подключенным через второй логический элемент И-Н Е 120 к входу третьего триггера 110, реализованного на усилителе 147, входном резисторе 148, резисторе обратной связи 149 и стабилитроне 150, через который выход усилителя 147 соединен с общей точкой, соединен с входами третьего 116 и четвертого 117 инвертирующих усилителей. Эти усилители реализованы соответственно на усилителях 151, 152, входных резисторах 153, 154 и резисторах обратной связи 155. 156. Входы этих усилителей и третьего триггера 110 соединены с третьим входом управляющего устройства 10, четвертый вход которого соединен с входами первого 112 и второго 113 неинвертирующих усилителей, реализованных соответственно на усилителях 157, 158, резисторах обратной связи 159, 160, которые через резисторы 161, 162 соединены с общей точкой, и с входом четвёртого триггера 111, реализованного на усилителе 163, входном резисторе 164, резисторе обратной связи 165 и стабилитроне 166, через который выход усилителя 163 соединен с общей точкой. Выход четвертого триггера 111 подсоединен к второму входу третьего логического элемента И-НЕ 121. выход которого соединен с управляющим элементом 124 третьего коммутирующего блока, управляющего двухпозиционным ключом 127, через который выходы первого 112-и второго 113 неинвертирующих усилителей подключены к третьему входу сумматора 118.
Устройство работает следующим образом. Сигнал задания по ускорению поворота экскаватора с командоаппарата 1 поступает на первый сумматор 2 и через задатчикЗ интенсивности скорости поворота экскаватора на второй сумматор 8. На втором сумматоре 8 сигнал задания по скорости поворота сравнивается с сигналом фактической скорости поворота, поступающим с датчика 7 скорости поворота, и определяется сигнал ошибки скорости поворота,
поступающий на вторые входы формирователя 9 сигнала переключения и блок управления 10 и первый вход датчика 5 косвенного измерения возмущения. Сигнал с датчика 7 скорости поворота также посту0 пает на первый вход датчика 4 упругого момента, в котором по этому сигналу и сигналу с датчика 6 тока якорной цепи определяются сигналы фактического ускорения поворота экскаватора и упругого момента. Первый
5 из этих сигналов используется для определения на первом сумматоре 2 сигнала ошибки ускорения, поступающей на третий входы формирователя 9 сигнала переключения и блок управления 10. Второй из этих
0 сигналов вместе с сигналом ошибки скорости поворота используется в датчике 5 косвенного измерения возмущения для определения сигнала возмущения, поступающего на четвертый вход блока управления
5 Ю. По сигналам ошибки скорости и ускорения поворота и сигналууправления электроприводом 11 в формирователе 9 сигнала переключения согласно (1) формируется сигнал переключения, поступающий на пер0 вый вход блока управления 10. На выходе блока управления 10 формируется сигнал управления электроприводом 11 вида (3), обеспечивающий независимое от внешних и внутренних возмущений воспроизведе5 ние электроприводом управляющего воздействия и устранение колебаний упругого момента. Переключение коэффициентов усиления осуществляется в блоке управления 10 автомататически согласно (4), (5), (6)
0 в зависимости от соотношения знака сигнала переключения и сигналов ошибок по скорости и ускорению поворота и знака сигнала возмущения.
Положительный эффект по сравнению с
5 прототипом достигается за счет, во-первых,, сокращения времени экскавации на (2-3)% путем устранения устройства выбора зазора и задания сразу же допустимого значения скорости поворота экскаватора, и,
0 во-вторых, уменьшением в скользящем режиме на (40-50)% динамических нагрузок колебаний упругого момента, которые возникают при выбранном зазоре из-за неравномерного износа шестерен в много5 двигательных приводах и составляют 1,5- 1.7 стопорного значения.
Формула изобретения 1. Способ ограничения динамических нагрузок механизма поворота экскаватора, основанный на задании и контроле скорости поворота экскаватора, по которым определяют сигнал ошибки по скорости, и измерении тока якорной цепи электродвигателя, отличающийся тем, что, с целью повышения производительности экскаватора за счет уменьшения времени переходного процесса и сокращения времени простоев, формируют сигнал возмущения, задают и вычисляют значение ускорения поворота, по которым определяют сигнал значения ошибки ускорения поворота, по этому сигналу и сигналу ошибки по скорости формируют сигнал переключения, знак которого сравнивают со знаками сигналов ошибок по скорости и ускорению поворота и знаком сигнала возмущения, в зависимости от соотношений знаков указанных сигналов определяют коэффициент усиления в цепях обратных связей по скорости и ускорению поворота и возмущения, с помощью которых формируют сигнал управления на электропривод.
2. Устройство для ограничения динамических нагрузок механизма поворота экскаватора, содержащее командоаппарат, первый сумматор, датчик косвенного измерения возмущения, датчик тока якорной це- пи электродвигателя регулируемого электропривода, отличающееся тем, что оно снабжено задатчиком интенсивности изменения скорости поворота, датчиком
0
5
0
5
0
упругого момента, датчиком скорости поворота, вторым сумматором, формирователем сигнала переключения и блоком управления, выход которого подключен к первому входу преобразователя и к первому входу формирователя сигнала переключения, выход которого соединен с первым входом блока управления, второй вход блока управления соединен с выходом второго сумматора и с вторым входом формирователя сигнала переключения, к третьему входу которого подключен выход первого сумматора, первый вход датчика косвенного измерения возмущения и третий вход блока управления, четвертый вход блока управления соединен с выходом датчика косвенного измерения возмущения, второй вход которого соединен с первым выходом датчика упругого момента, к второму выходу которого подсоединен первый вход первого сумматора, второй вход последнего соединен с выходом командоаппарата и с входом за- датчика интенсивности изменения скорости поворота, выход которого соединен с первым входом второго сумматора, второй вход которого соединен с выходом датчика скорости поворота и с первым входом датчика упругого момента, к второмуъходу которого подсоединены второй вход управляемого преобразователя и выход датчика тока якорной цепи электродвигателя. ;- 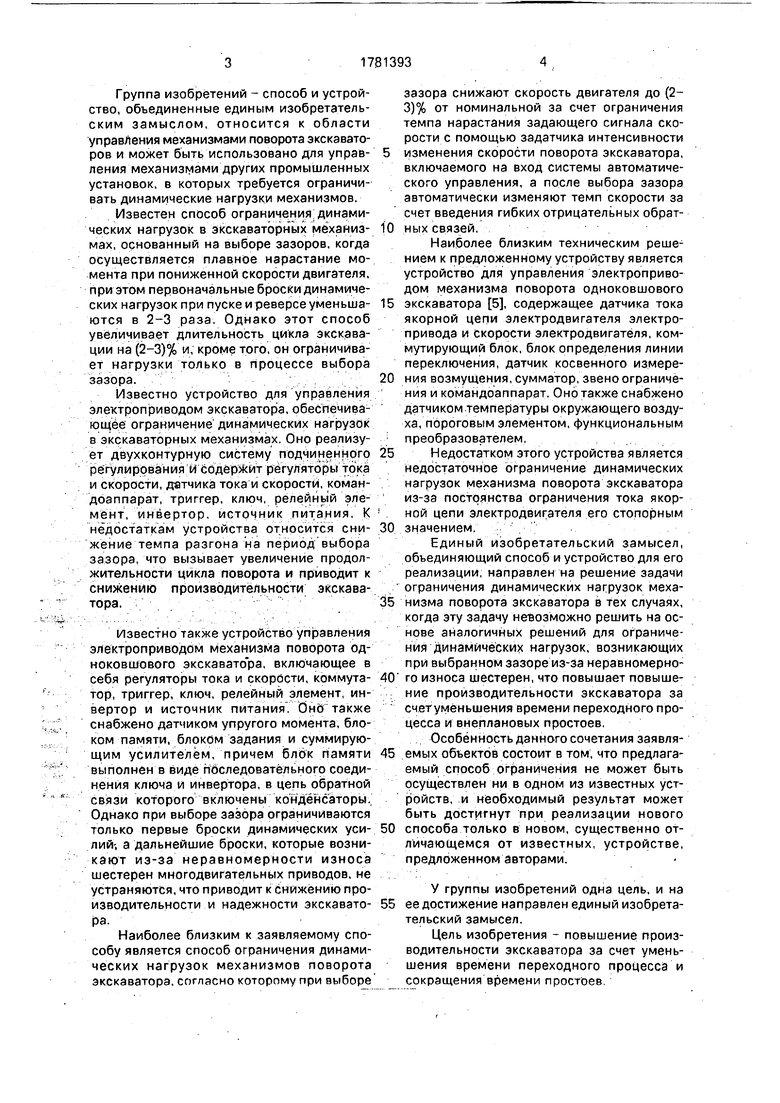
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1382919A1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Устройство управления электроприводами копающих механизмов экскаватора | 1986 |
|
SU1511343A1 |
| Устройство комбинированного управления электроприводом поворота экскаватора | 1990 |
|
SU1810440A1 |
| Устройство управления электроприводами эскаватора | 1986 |
|
SU1432150A1 |
| Устройство для ограничения динамических нагрузок в экскаваторных механизмах | 1986 |
|
SU1416627A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1984 |
|
SU1240649A1 |
| Устройство для автоматизированного управления электроприводом экскаватора-драглайна | 1983 |
|
SU1145093A1 |
Сущность изобретения: устройство содержит: 1 командоаппарат (1), 2 сумматора 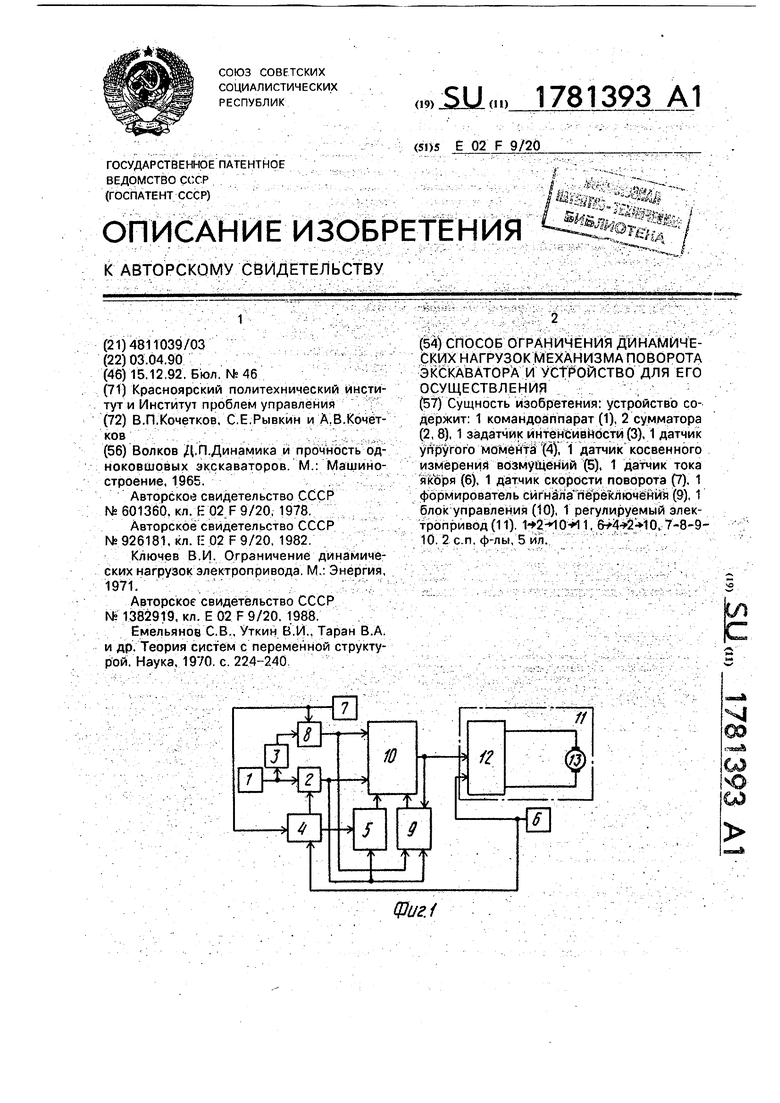
Фиг. 2
ви.
г «Ј
CZH
Физ.З
Вык.
| Волков Д.П.Динамика и прочность одноковшовых экскаваторов | |||
| М.: Машиностроение, 1965, Авторское свидетельство СССР № 601360, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления электроприводом одноковшового экскаватора | 1979 |
|
SU926181A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ключев В.И | |||
| Ограничение динамических нагрузок электропривода | |||
| М.- Энергия, 1971 | |||
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1382919A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| Емельянов С.В., Уткин В.И., Таран В.А | |||
| и др | |||
| Теория систем с переменной структурой | |||
| Наука, 1970 | |||
| с | |||
| Фотореле для аппарата, служащего для передачи на расстояние изображений | 1920 |
|
SU224A1 |
