00
30 05
00
Изобретение относится к весоизмерительной технике и может быть использовано для определения веса груза, транспортируемого конвейерами, на предприятиях строительной индустрии, тепловых электростанциях, на рудниках.
Целью изобретения является повышение точности определения веса груза.
На чертеже представлена схема весов.
Весы содержат датчик 1 тока и дат
третьего блока 10 умножения будет сигнал, пропорциональньм произведению температуры t статорной обмотки двигателя 3 и действующего значения тока в ней. Этот сигнал поступает на второй вход первого операционного усилителя 15, коэффициент усиления . которого по этому входу в масштабе пропорционален произведению темпера турного коэффициента с6 и активного сопротивления фазы статорной обмотки г Q при нулевой температуре. На первый вход первого операционного усили

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения веса груза,транспортируемого конвейером | 1986 |
|
SU1447732A1 |
| Устройство для определения веса расплава в ковшах на подъемных кранах | 1983 |
|
SU1114894A1 |
| Весовой дозатор непрерывного действия | 1985 |
|
SU1265486A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
| Весовой дозатор непрерывного действия | 1986 |
|
SU1339410A2 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2069034C1 |
| Устройство для моделирования электрических машин | 1988 |
|
SU1597886A1 |
| Электропривод шахтной подъемной машины | 1986 |
|
SU1390754A1 |
| Конвейерные весы | 1987 |
|
SU1522044A1 |
Изобретение относится к весоизмерительной технике. Цепь изобретения - повьшение точности опредепения массы груза. Для определения массы компонентов перемещаемого двухкомпо- нентного груза сигналi, пропорциональный массе груза, с выхода сг мматора 22 поступает на вход блока 30 деления. На второй вход последнего поступает сигнал с выхода датчика 32 груза. Этот сигнал пропорционален объему груза, который перемещается конвейером в течение его работы. На выходе блока 31 деления будет сигнал, пропорциональный доли первого компонента в общей массе перемещаемого груза. 1 ил.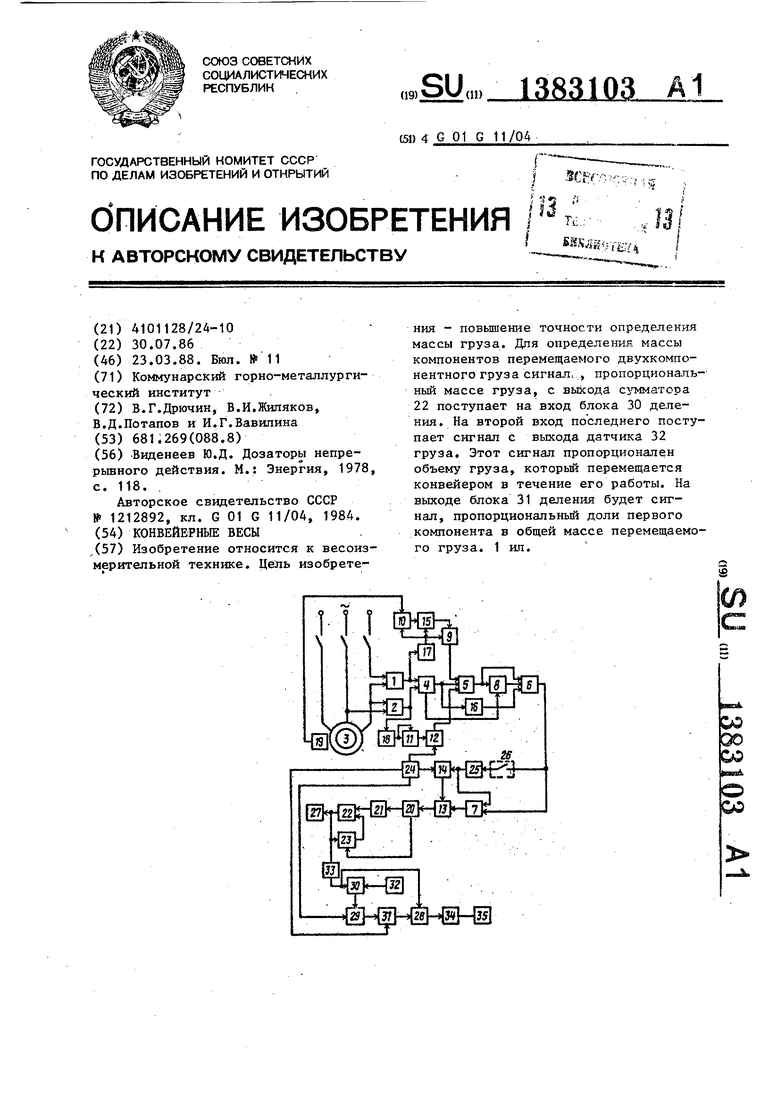
20
25
чик 2 напряжения, подключенные к теля 15 поступает сигнал с выхода торной обмотке асинхронного приводного двигателя 3, датчик 4 скольжения, три блока 5-7 сравнения, пять блоков 8-12 умножения, два блока 13 и 14 деления , два операционных усилителя 15 и 16, два вьтрямителя 17 и 18, датчик 19 температуры, интегратор 20, аналого-цифровой преобразователь 21, сумматор 22, регистр 23 памяти, блок 24 задания, блок 25 памяти, датчик 26 наличия груза и блок 27 индикации.
Кроме этого, в случае необходимости определения веса компонентов перемещаемого двухкомпонентного груза весы дополнительно содержат шестой блок 28 умножения, четвертый блок 29 сравнения, третий и четвертьй блоки 30 и 31 деления, датчик 32 груза, цифроанапоговый 33 и аналого-цифровой 34 преобразователи, второй блок 35 индикации.
Весы работают следующим образом.
Для определения веса груза, транспортируемого конвейером, необходимо вначале осуществить пуск конвейера без груза (. в режиме холостого хода). При этом контакты датчика 26 наличия груза замкнуты и на выходе датчика 4 скольжения имеют место сигналы, пропорциональные мощности
30
35
40
45
первого выпрямителя 17, при этом к эффициент усиления по первому вход в масштабе пропорционален активном сопротивлению r,g . С учетом этого выходе первого операционного усили ля 15 имеет место сивнал, пропорци нальньм (1, Г,о + I , г о-oi t) , т.е падению напряжения на активном соп тивлении статорной обмотки двигате ля 3. Сигнал на выходе пятого блок 12 умножения пропорционален мощнос потерь PJ., в стали асинхронного дви гателя, так как на один вход пятог блока 12 умножения поступает сигна с выхода блока 24 задания (пропорц нальный величине сн потери в стали при номинальном нап жении и1ц), а на другой вход - сиг с выхода датчика 2 напряжения, но , предварительно пропущенный через в рой вьшрямитель 18 и четвертьй бло 11 умножения. Сигналы с выхода вто рого блока 9 умножения и с первого выхода датчика 4 скольжения поступ ют на соответствующие входы первог блока 5 сравнения с масщтабным уве
личением в три раза, так как сигна с указанных вьшодов пропорциональн фазовым величинам (т.е. мощности п терь в статорной обмотке Р„ | ,п одн
I оср потребляемой
Р, и скольжению SQ двигателя 3 в режиме работы конвейера без груза. Сигнал с датчика 4 скольжения поступает на первый (суммирующий) вход первого блока 5 сравнения, на другие вычитающие входы которого поступают соответственно сипналы с выходов блоков 9 и 12 умножения. Сигнал на выходе второго блока 9 умножения пропорционален мощности Р;у,оф потерь в фазе статорной обмотки двигателя 3 с учетом изменения ее-температуры. Изменение температуры контролируется датчиком 19 температуры. На выходе
0
5
5 теля 15 поступает сигнал с выхода
0
5
0
5
первого выпрямителя 17, при этом коэффициент усиления по первому входу в масштабе пропорционален активному сопротивлению r,g . С учетом этого на выходе первого операционного усилителя 15 имеет место сивнал, пропорциональньм (1, Г,о + I , г о-oi t) , т.е. падению напряжения на активном сопротивлении статорной обмотки двигателя 3. Сигнал на выходе пятого блока 12 умножения пропорционален мощности потерь PJ., в стали асинхронного двигателя, так как на один вход пятого блока 12 умножения поступает сигнал с выхода блока 24 задания (пропорциональный величине сн потери в стали при номинальном напряжении и1ц), а на другой вход - сигнал с выхода датчика 2 напряжения, но , предварительно пропущенный через второй вьшрямитель 18 и четвертьй блок 11 умножения. Сигналы с выхода второго блока 9 умножения и с первого выхода датчика 4 скольжения поступают на соответствующие входы первого блока 5 сравнения с масщтабным уве
личением в три раза, так как сигналы с указанных вьшодов пропорциональны фазовым величинам (т.е. мощности потерь в статорной обмотке Р„ | ,п одной
фазы и мощности Р
oqp
I оср потребляемой0
одной фазой двигателя). В результате этого на выходе первого блока 5 сравнения имеет место сигнал, определяемый разностью сигналов, пропорциональных мощности Р,о (Р,о ЗР,ОД,), потребляемой двигателем из сети, мощности потерь в статорной обмотке
(Р
М 10
ЗР )
И МОЩНОСТИ ПО5
в стали Р двиг ателя, т.е. этот
мю
i ерь л хл л i.tfi, л. j
сигнал пропорционален электромагнитной мощности Рдд,о развиваемой двигателем 3. Этот сигнал поступает на второй (суммирующий) вход второго
31
блока 6 сравнения, на другие (вычитающие) входы которого поступают сигналы с выхода первого блока 8 умножения и с выхода второго операционного усилителя 16. Сигнал с выхода первого блока 8 умножения пропорционален произведению ,о 3о, т.е. пропорционален мощности потерь роторно обмотке двигателя. Сигнал с выхода второго операционного усилителя 16 пропорционален мощности дополнительных потерь Рд, так как на его вход поступает сигнал, пропорциональньй мощности, потребляемой одной фазой двигателя 3 из сети, а коэффициент передачи второго операционного усилителя 16 должен быть равен 0,015.
На выходе второго блока 6 сравнения будет сигнал, пропорциональный сумме полезно отдаваемой двигателем мощности Р-го и мощности механических потерь Р,(дех двигателе, т.е.
+ Р,
Этот сигпропорционален Fjjj . i J,e) нал поступает через датчики 26 наличия груза на вход блока 25 памяти и одновременно на первый (суммирующий) вход третьего блока 7 сравнения на выходе которого сигнал равен нулю, так как имеет место равенство сигналов на суммирующем и вычитающем (с выхода блока 25 памяти) входах третьего блока 17 сравнения. В блоке 25 памяти сигнал, пропорциональньй акх го мех записывается и
хранится до очередного пуска конвейера без груза. Сигнал с выхода блока 25 памяти поступает в качестве делимого на вход второго блока 14 деления, а в качестве делителя на вход второго блока 14 деления поступает сигнал с вькода блока 24 задания, ко торьй пропорционален постоянным величинам элементов конвейера, практически не изменяющимся в процессе эксплуатации конвейера (линейная масса роликов на грузовой ветви g., линейная масса роликов на:порожней ветви gp , линейная масса ленты g, длина конвейера L), т.е. сигнал с этого выхода блока 24 задания пропорционален
L«g (2gA +
е + e l,
Sp 6 Р
). Операция деления сигнала с выхода блока 25 памяти на сигнал, пропорциональньй величине t«g- (2g,,, + gp + gp ) и поступающий с выхода блока 24 задания, позволяет получить сигналы на выходе второго блока 14-деления, пропорциональньй переменным величинам, характеризующи
0
5
0
5
0
0
5
5
103
конвейер (коэффициенты сопротирления k,, W , КПД конвейера /дд) 5 которые изменяются в процессе д.пптельной эксплуатации конвейера. При таком действии на выходе второго блока 1А деления имеет место сигнал, пропорциональньй величине k-w /1000V.,, Это
L М
позволяет периодически в процессе, эксплуатации осуществлять корректировку коэффициента пропорциональности между весом груза, трансгортгтруемого конвейером, и мощностью Р, .
При подаче груза на конвейер датчик 26 наличия груза на конвейере, размыкает свои контакты и блок 25 памяти отключается от второго блока 6 сравнения. На выходе блока 25 памяти при этом остается сигнал, пропорциональньй мощности , а на выходе второго блока 14 деления остается сигнал, пропорциональньй k-w / /1000 -м. Это будет до очередного пуска конвейера без груза. При перемещении груза по конвейеру сигнал с выхода второго блока 6 сравнения пропорционален мощности Р, определяемой перемещаемым грузом. Этот сигнал в третьем блоке 7 сравнения сравнивается с сигналом, пропорциональным P,.f. поступающим с выхода блока 25 памяти. На выходе третьего блока 7 сравнения будет сигнал, пропорциональный разности . Эта разность поступает на вход первого блока 13 деления в качестве делимого, на другой вход которого поступает сигнал с выхода второго блока 14 деления. В результате этого на выходе первого блока 13 деления будет сигнал, пропорциональньй весу груза, находящегося в данный момент времени на конвейере. Этот сигнал интегрируется интегратором 20, в котором по достижении определенной величины выходного сигнала осуществляется режим сброса. Выхгодной сигнал интегратора 20 через аналого-цифровой преобразователь 21 в В1ще цифрового кода поступает на первьй вход сумматора 22. До первого сброса интегратора 20 с выхода регистра 23 памяти на второй вход сумматора 22 поступает сигнал, равньй нулю. Следовательно, до первого сброса интегратора 20 на выходе сумматора 22 будет сигнал в виде цифрового кода, определяемьй только сигналом, поступающим на первьй вход сумматора 22. Запись в регистр 23
памя ти осуществляется по команде, поступающей с интегратора 20 в момент сброса выходного сигнала. Запи- саньый в регистре 23 памяти сигнал в виде цифрового кода сохраняется до очередного сброса интегратора 20. Пр этом на выходе сумматора 22 будет уже сигнал, равный сумме сигналов, поступающих с регистра 23 памяти и с аналого-цифрового преобразователя 21. Эта сумма, пропорциональная весу груза, транспортируемого конвейером в течение всей работы конвейера, поступает в блок 27 индикации, на кото- ром фиксируется вес груза.
Для определения веса компонентов перемещаемого двухкомпонентного груза сигнал, пропорциональньш весу G двухкомпонентного груза, с выхода сумматора 22 поступает через цифро- аналоговый преобразователь 33 на пер- вьш вход (делимое) третьего блока 30 деления. На второй вход (делитель) третьего блока 30 деления поступает сигнал с выхода датчика 32 груза. Этот сигнал пропорционален объему V груза, который перемещается конвейером в течение его работы. В результате этого на выходе третьего блока 30 деления имеет место сигнал,
порциональный отношению -. Отношение
г
- равно , + (1 - oi),, гдe& - доля
в суммарном весе груза первой компо- ненты,- -g, и - соответственно, удельный вес компонентов груза. Следовательно сигнал с выхода третьего блока 30 деления пропорционален + + (1 Этот сигнал поступает на суммирующий вход четвертого блока 29 сравнения, на вычитающий вход которого поступает сигнал с выхода блока 24 задания по постоянной второго компонента груза, т.е. сигнал, про- порциональный удельному весу y/i. С учетом этого на выходе четвертого блока 29 сравнения будет сигнал, пропорциональный (si(i (Ра) Этот сигнал поступает в виде делимого на вход четвертого блока 31 деления, на второй вход (делитель) которого поступает сигнал с выхода блока 24 задания по постоянным компонентов груза, т.е сигнал, пропорциональный разности jf, В результате чего на выходе четвертого блока 31 деления будет сигн:ап, пропорциональныйot , т.е. доли первого компонента в общем весе перемещаемого груза.
Сигнал с выхода четвертого блока 31 деления поступает на первый вход шестого блока 28 з ножения, на второй вход которого поступает сигнал с выхода цифроаналогового преобразователя 33, т.е. шестой блок 28 умножения осуществляет умножение сигналов, rtpo- порциональных соответственно об и G. В результате, на выходе шестого блока 28 умножения место сигнал, пропорциональный весу первого компонента в перемещаемом грузе. Сигнал с выхода шестого блока 28 умножения через аналого-цифровой
преобразователь 34 поступает на вход блока 35 индикации, на котором фиксируется вес первого компонента в общем весе двухкомпонентного груза, фиксируемого блоком 27 индикации.
Формула изобретения
Конвейерные весы, содержащие датчики тока и напряжения, входы которых подключены к статорной обмотке асинхронного приводного двигателя конвейера, а выходы - к последовательно соединенным датчику скольжения, первому блоку сравнения, первому блоку умножения, второму и третьему блокам сравнения, первому блоку деления, интегратору, аналого-цифровому преобразователю, сумматору и регистру памяти, второй вход которого связан с вторым выходом интегратора, выход регистра памяти связан с вторым входом сумматора, при этом выход второго блока сравнения связан с последовательно соединенным датчиком наличия груза и блоком памяти, выход jKOToporo соединен с вторым входом третьего блока сравнения и с первым входом второго блока деления, второй вход которого связан с первым выходом блока задания, а выход - с вторым входом первого блока деления, выход датчика тока подключен к последовательно соединенным первому вьшрями- телю, первому операционному усипите- лк), второму блоку умножения и второму входу первого блока сравнения, выход которого подключен к второму входу второго блока сравнения, выход первого выпрямителя соединен с вторым входом второго блока умножения, первый выход датчика скольжения связан с последовательно соединенными вторым операционным усилителем и третьим входом второго блока сравнения, вто- рой выход датчика скольжения соединен с вторым входом первого блока умножения, выход сумматора связан с блоком индикации, отличающие- с я тем, что, с целью повышения ТОЧно ти определения веса груза, в них дополнительно введены третий, четвертый и пятый блоки умножения, датчик температуры и второй вьшр5шитель, причем выход датчика температуры со- единен с первым входом третьего блока
умножения, второй вход которого соединен с выходом первого выпрямителя, выход третьего блока умножения связа с вторым входом первого операционного усилителя, кроме этого, выход датчика напряжения связан с входом второго выпрямителя, выход которого соединен с входами четвертого блока умножения, выход которого связан с первым входом пятого блока умножения, второй вход которого соединен с вторым выходом блока задания, выход пятого блока умножения связан с третьим входом первого сравне - ния.
| Виденеев Ю.Д | |||
| Дозаторы непре- рьшного действия | |||
| М.: Энергия, 1978, с | |||
| Прибор для массовой выработки лекал | 1921 |
|
SU118A1 |
| Устройство для определения веса груза,транспортируемого конвейером | 1984 |
|
SU1212892A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
