4 4iik
СО
to
Изобретение относится к весоизмерительной технике и может быть использовано для определения веса груза, транспортируемого конвейерами на тепловых электростанциях, в карьерах, на рудниках, в шахтах.
Цель изобретения - повышение точности определения веса груза, транспортируемого конвейером за счет исключения погрешности в определении мощности холостого хода конвейера.
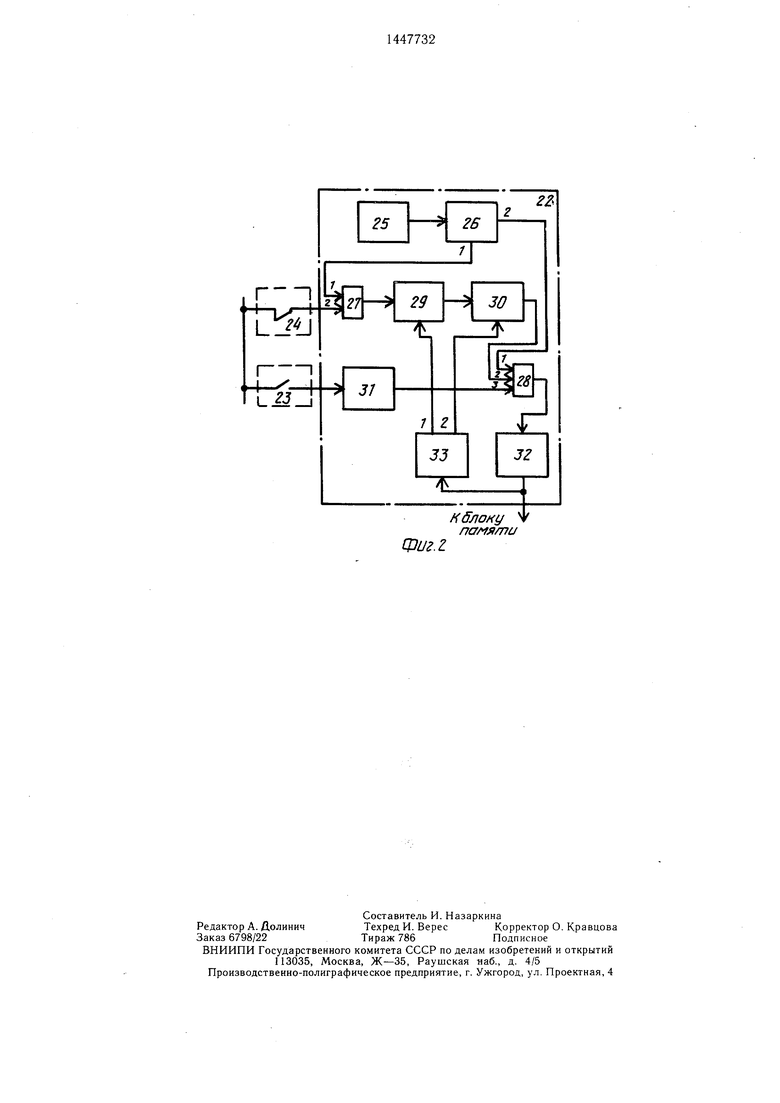
На фиг. 1 изображена блок-схема устройства для определения веса груза, транспортируемого конвейером; на фиг. 2 - блок контроля холостого хода.
В цепь статорной обмотки асинхронного электродвигателя 1 включены датчик 2 тока и датчик 3 напряжения, выходы которых подключены к входам датчика 4 скольжения, промежуточный выход активной мощности которого подключен к входу усилителя 5 и к положительному входу блока 6 сравнения/ к отрицательным входам которого подключены первый выход блока 7 задания и выход блока 8 перемножения, к входам которого подключены выход усилителя 9 и выход выпрямителя 10, выход которого подключен к входу усилителя 9, к входу выпрямителя 10 подключен выход датчика 2 тока, выход датчика 4 скольжения также подключен к входу блока 11 перемножения, к которому подключен выход блока 6 сравнения, который также подключен к положительному входу блока 12 сравнения, к отрицательным входам которого подключены выход усилителя 5 и выход блока 11 перемножения, выход блока 12 сравнения подключен к информационному входу блока 13 памяти и положительному входу блока 14 сравнения, к отрицательному входу которого подключен выход блока 13 памяти, который одновременно подключен к входу блока 15 деления в качестве делимого, в качестве делителя к блоку 15 деления подключен второй выход блока 7 задания, выход блока 15 деления подключен в качестве делителя к входу блока 16 деления, к которому в качестве делимого подключен выход блока 14 сравнения, выход блока 16 ляе- ления подключен к входу интегратора 17, выход которого через аналого-цифровой преобразователь 18 подключен к первому входу сумматора 19 и к управляющему входу регистра 20 памяти, выход сумматора 19 подключен к информационному входу регистра 20 памяти и к блоку 21 индикации, к управляющему входу блока 13 памяти подключен выход блока 22 контроля состоя- ная холостого хода, к входам которого подключены нормально разомкнутый контакт РП реле 23 пуска и нормально замкнутый контакт датчика 24 наличия материала.
Блок 22 контроля холостого хода (фиг. 2) содержит генератор 25, выход которого подключен к входу блока 26 делителя частоты, первый выход которого соединен с первым входом первого блока И 27, а второй выход - с первым входом второго элемента И 28, второй вход первого элемента И 28 соединен с датчиком 24 наличия материала, а его выход через счетчик 29 и триггер 30 подключен ко второму входу второго элемента И 28, третий вход которого подключен к выходу реле 31 времени, а выход через блок 32 формирования импульсов записи - к управляющему входу блока 13 памяти и к блоку 33 формирования управляющ.их
0 импульсов сброса, первый выход которого подключен к управляющему входу счетчика 29, а второй - к входу сброса триггера 30,. вход реле 31 времени соединен с реле пуска 23 конвейера.
Устройство работает следующим образом. При включении приводного электродвигателя 1 на выходе датчиков 2 тока и напряжения 3 появляются сигналы, которые посту- , пают на вход датчика 4 скольжения. Одновременно выходной сигнал датчика 2 тока
0 выпрямляется выпрямителем 10, усиливается усилителем 9 и поступает на вход блока 8 перемножения, где перемножается с выпрямленным сигналом датчика 2 тока. На выходе блока 8 перемножения получаем сигнал, пропорциональный мощности потерь в статоре РСТ, который поступает на вычитающий вход блока 6 сравнения. С промежуточного выхода активной мощности датчика 4 скольжения сигнал, пропорциональный активной мощности Ра, потребляемой приводом конп вейера, поступает на положительный вход блока 6 сравнения, на второй вычитающий вход которого поступает сигнал с выхода блока 7 задания, пропорциональный мощности потерь в стали PC. Сигналы, поступающие на вход блока 6 сравнения, алгебраи5 чески суммируются и на его выходе получаем сигнал, пропорциональный электромагнитной мощноти РЭ„, развиваемой электродвигателем 1 конвейера . Сигнал, пропорциональный активной мощности Ра, одновременно усиливается усилителем 5
0 с коэффициентом усиления 0,05 и поступает на вычитающий вход блока 12 сравнения, как сигнал, пропорциональный мощности постоянных потерь Р 0,05Рс.
На суммирующий вход блока 12 сравнес ния поступает сигнал с выхода блока 6 сравнения, пропорциональный электромагнитной мощности РЭМ, который одновременно поступает на вход блока 11 перемножения, где перемножается с выходным сигналом датчика 4 скольжения, пропорциональным
0 скольжению S. В результате на выходе блока 11 перемножения получаем сигнал, пропорциональный мощности потерь в роторной цепи .5, который поступает на вычитающий вход блока 12 сравнения. Входные сигналы блока 12 сравнения алгебраи5 чески суммируются и на его выходе получаем сигнал, пропорциональный мощности на валу электродвигателя 1 Pg - Р „-Рр-/ ;, , который поступает на суммирующий вход
блока 14 сравнения и одновременно на ин- формаигйоБный вход блока 13 памяти, где он sanoMifHaeTCfl как пропорциональный мощности холостого хода Р. С выхода блока 13 памяти сигнал, пропорциональный Р, поступает на вычитающий вход блока 14 сравнения и одновременно на вход блока 15 деления в качестве делителя. На второй вход блока 15 деления в качестве делителя поступает сигнал со второго выхода блока 7 задания, пропорциональный постоянной величи- не конструктивных параметров конвейера, которые практически не изменяются в процессе эксплуатации конвейера (линейная масса роликов на грузовой ветви qfp, линейная масса роликов на порожней ветви «ур, линейная масса ленты q,, длина L конвейера), т. е. сигнал этот пропорционален величине Lg(qp- -qp-}-qj, -2)-1000. В результате на выходе блока 15 деления получаем сигнал пропорциональный переменным величинам, характеризующим конвейер (коэффициент сопротивления KW, КПД конвейера Щт), которые изменяются в процессе длительной эксплуатации конвейера Это обстоятельство позволяет периодически в процессе эксплуатации осуществлять коррек- тировку коэффициента пропорциональности между мощностью на валу электродвигателя и весом груза. На отрицательный вход блока 14 сра внения поступает сигнал с выхода блока 13 памяти, пропорциональный мощности холостого хода Р. Входные сигналы блока 14 сравнения алгебраически суммируются, в результате на его выходе получаем сигнал, пропорциональный мощности, затраченной на транспортирование материала -РХ, который поступает на вход блока 16 деления в качестве делимого. На второй вход блока 16 деления в качестве делителя поступает выходной сигнал блока 15 деления. В результате деления на выходе блока 16 деления получаем сигнал, пропорциональный весу груза, находящегося в данный момент времени на конвейере. Данный сигнал поступает на вход интегратора 17, который интегрирует входной сигнал и по достижении определенной величины выходного сигнала осуществляется режим сброса. Выходной сигнал интегратора 17 через АЦП 18 в виде цифрового кода поступает на первый вход сумматора 19, на второй вход которого поступает сигнал с выхода регистра 20 памяти и суммируется с первым входным сигналом. Сигнал с выхода сумматора 19 поступает на вход регистра 20 памяти и на вход блока 21 индикации. До первого сброса интегратора 17 с выхода регистра 20 памяти поступает сигнал, равный нулю, следовательно, на выходе сумматора 19 будет сигнал, равный сигналу на первом его входе. Запись в регистр 20 памяти осуществляется по команде, поступающей с интегратора 17 в момент сброса выходного сигнала. Записанный в регистр 20 памяти сигнал в виде
цифрового кода сохраняется до очередного сброса интегратора 17. При этом на выходе сумматора 19 будет уже сигнал, равный сумме сигналов, поступающих с регистра 20 памяти и с АЦП 18. Эта сумма, пропорциональная весу груза, транспортируемого конвейером в течение всей работы конвейера, поступает в блок 21 индикации, на кдтором фиксируется вес груза, перевезенного конвейером на данный момент времени. На управляющий вход блока 13 памяти поступает сигнал с выхода блока 22 контроля состояния холостого .хода, по команде которого блок 13 памяти запоминает сигнал, поступающий на его информационный вход, пропорциональный мощности РЛ на валу электродвигателя 1. При этом мощность Рд , записанная в память, принимается за мощность холостого хода Р. Для более точного соответствия Р мощности холостого хода PI необходимо точно определять момент холостого хода конвейера. С этой целью в устройство введен блок 22 контроля состояния холостого хода.
Блок 22 контроля состояния холостого хода обеспечивает запись мощности Р в качестве мощности холостого хода Р в блок 13 памяти лищь в том случае, если окончился переходный режим, т. е. пуск, отсутствует груз по всей длине грузовой ветви конвейера и если поступил импульс записи мощности холостого хода. Интенсивность импульсов записи мощности холостого хода определяется степенью изменения мощности холостого хода при эксплуатации конвейера, отсюда интервал между импульсами может быть равен смене, суткам, неделе, месяцу.
При прекращении загрузки конвейера срабатывает датчик 24 наличия материала и его нормально замкнутый контакт замыкается и на первый вход элемента И 27 поступает положительный сигнал. А на второй вход элемента И 27 поступает сигнал с первого выхода делителя 26 частоты, который представляет собой последовательность тактовых импульсов. При замкнутом контакте ДНМ элемент И 27 пропускает импульсы делителя 26 частоты, которые считываются счетчиком 30. Счетчик 30 считает импульсы в течение времени, за которое конвейер может полностью разгрузиться, после этого с его выхода сигнал через триггер 29 поступает на второй вход элемента И 28. При включении электродвигателя 1 срабатывает реле 23 пуска, включенное в пусковые цепи электродвигателя 1, замыкая свой нормально разомкнутый контакт РП. При замыкании контакта РП срабатывает реле 31 времени, которое с выдержкой времени пропускает входной сигнал, который поступает на первый вход элемента И 28. Выдержка времени выбирается равной времени пуска конвейера На третий вход элемента И 28 поступает сигнал со второго выхода делителя 26 частоты. Этот сигнал представляет собой последовательность тактовых импульсов. Интервал между импульсами задается временем, величина которого определяется интенсивностью изменения мощности холостого хода при эксплуатации конвейера.
Так как мощность холостого хода изменяется в течение длительного времени, то интервал между импульсами может быть равен смене, суткам, неделе, месяцу. При совпадении всех трех сигналов на входе элемента И 26 он открывается, и на его выходе появляется сигнал, который поступает на вход формирователя импульса 32 записи. С выхода формирователя 32 импульса записи сигнал в виде импульса поступает на уп- равляющий вход блока 13 памяти в качестве команды, по которой блок 13 памяти запоминает входной сигнал, пропорциональный мощности РВ на валу электродвигателя . Одновременно выходной сигнал формирователя 32 импульса записи поступает на вход блока 33 формирования импульса сброса, с первого выхода которого сигнал поступает на вход сброса информации счетчика 30, а со второго выхода сигнал поступает на вход сброса информации триггера 29. После этого счетчик 30 и триггер 29 переводятся в нуль. Для создания импульсов в блоке 22 контроля состояния холостого хода используется эталонный генератор 25 частоты, с выхода которого импульсы поступают на вход делителя 26 частоты.
Формула -изобретения
1. Устройство для определения веса груза, транспортируемого конвейером, содержащее асинхронный приводной двигатель конвей- ера, в цепь статорной обмотки которого вклю чены датчики тока и напряжения, выходы которых подключены к входам датчика скольжения, выход которого соединен с входом первого усилителя и с суммирующим входом первого блока сравнения, вычитающие входы которого подключены к первому выходу блока задания и выходу первого блока перемножения, к входам которого подключены выход второго усилителя и выход выпрямителя, выход которого соединен также с вхо- дом второго усилителя, а вход выпрямителя соединен с выходом датчика тока, входы второго блока перемножения соединены с выходом датчика скольжения и с выходом первого блока сравнения, который соединен также с суммирующим входом второго блока сравнения, вычитающие входы которого
соединены с выходами первого усилителя и второго блока перемножения, выход второго блока сравнения соединен с суммирующим входом третьего блока сравнения, выход блока памяти соединен с вычитающим входом третьего блока сравнения и с входом делимого первого блока деления, вход делителя которого соединен с вторым выходум блока задания, а его выход соединен с входом делителя второго блока деления, вход делимого у которого соединен с выходом третьего блока сравнения, а выход - с входом интегратора, выход которого соединен через аналого-цифровой преобразователь с первым входом сумматора и с управляющим входом регистра памяти, информационный вход которого соединен с выходом сумматора, с которым соединен также блок индикации и датчик наличия материала, отличающееся тем, что, с целью повыщения точности определения веса груза за счет исключения погрещности в определении мощности холостого хода конвейера, оно снабжено блоком контроля состояния холостого хода, выход которого соединен с управляющим входом блока памяти, информационный вход которого соединен с выходом блока сравнения, первый вход блока контроля состояния холостого хода соединен с датчиком наличия материала, а второй - с реле пуска конвейера.
2. Устройство по п. 1, отличающееся тем, что блок контроля состояния холостого хода содержит генератор, делитель частоты, два элемента И, счетчик, триггер, блок формирования управляющего импульса записи, блок формирования управляюидего импульса сброса, реле времени, причем выход генератора соединен с входом блока делителя частоты, первый выход которого соединен с первым входом первого элемента И, а второй выход - с первым входом второго элемента И, второй вход первого элемента И соединен с датчиком наличия материала, а его выход через счетчик и триггер с вторым входом второго элемента И, третий вход которого соединен с выходом реле времени, а выход - с формирователем управляющих импульсов :;аписи, выход которого является выходом блока контроля состояния холостого хода и соединен также с блоком формирования управляющих импульсов сброса, первый выход которого соединен с управляющим входом счетчика, а второй - с входом сброса триггера, вход реле времени соединен с реле пуска конвейера.
.z
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейерные весы | 1986 |
|
SU1383103A1 |
| Способ контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1685834A1 |
| Устройство контроля работоспособности ленточного конвейера | 1989 |
|
SU1759758A1 |
| Устройство контроля загрузки поточно-транспортной системы | 1984 |
|
SU1185105A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТЕКУЩЕГО И ИНТЕГРАЛЬНОГО РАСХОДА СЫПУЧЕГО МАТЕРИАЛА | 1992 |
|
RU2047847C1 |
| Устройство для телединамометрирования глубинно-насосных скважин | 1990 |
|
SU1797131A1 |
| Устройство телединамометрирования глубинно-насосных установок | 1990 |
|
SU1767225A1 |
| Автоматические конвейерные весы | 1986 |
|
SU1337672A1 |
| Устройство контроля скорости ленты конвейера | 1989 |
|
SU1752687A1 |
| Устройство для измерения мощности резания | 1989 |
|
SU1739220A2 |
Изобретение относится к весоизмерительной технике и предназначено для измерения веса транспортируемого конвейерами (К) груза на тепловых электростанциях, в карьерах, на рудниках, в шахтах. Цель - повышение точности измерения веса транспортируемого груза за счет исключения погрешности в определении мош,ности холостого хода конвейера (ХХК). Для этого устр- во снабжено блоком 22 контроля состояния XX, выход которого соединен с управляю- Ш.ИМ входом блока памяти (БП) 13, а входы соединены с датчиком 24 наличия материала и с реле 23 пуска К. Информационный вход БП 13 соединен с выходом блока 12 сравнения, к положительному входу которого подключен выход блока 6 сравнения, а к отрицательным входам - выход усилителя 5 и выход блока перемножения 11. На управляющий вход БП 13 поступает сигнал с выхода блока 22. По его команде БП 13 запоминает сигнал, поступающий на его информационный вход, пропорциональный мощности Яв на валу электродвигателя 1. Мощность PS , записанная в память, принимается за мощность XX Р. Конструктивное выполнение блока 22 обеспечивает запись мощности Ре в качестве РХ в БП 13 лишь в том случае, если окончился переходный режим, т. е. пуск, отсутствует груз по всей длине грузовой ветви К и если поступил импульс записи РХ. 1 3. п. ф-лы, 2 ил. с (Л
| Устройство для определения веса груза,транспортируемого конвейером | 1984 |
|
SU1212892A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
