(Л
оо со о ел 4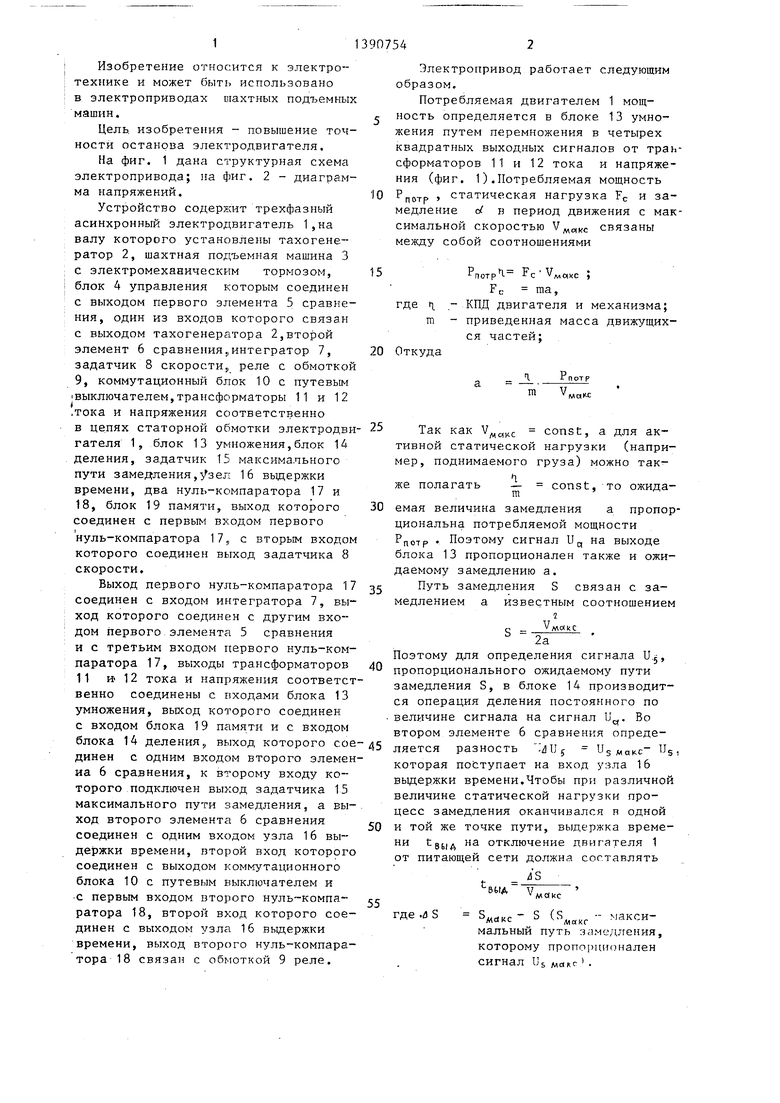

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Устройство токовой защиты электропривода | 1981 |
|
SU964835A1 |
| Электропривод подъемной машины | 1987 |
|
SU1511837A1 |
| Электропривод шахтной подъемной машины | 1984 |
|
SU1277332A1 |
| Устройство управления тормозом шахтной подъемной машины | 1988 |
|
SU1583342A1 |
| Устройство задания режима движения шахтной подъемной установки | 1986 |
|
SU1406110A1 |
| Устройство для защиты обмоток электродвигателя от конденсации влаги | 1989 |
|
SU1758755A1 |
| АВТОМАТИЗИРОВАННЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1969 |
|
SU257583A1 |
| Устройство для программирования скорости | 1981 |
|
SU1030770A1 |
| Плужковый сбрасыватель ленточного конвейера | 1986 |
|
SU1419969A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах шахтных подъемных машин. Цель изобретения - повьшение точности остановки электродвигателя. Указанная цель обеспечивается за счет применения блока 13 умножения, блока 14 деления, задатчика 15 максимального пути замедления при определении оптимального закона управления электродвигателем 1. Электропривод позволяет реализовать замедление шахтной подъемной машины 3 на свободном выбеге с переносом точки начала замедления. Интенсивность процесса замедления машины 3 регулируется пропорционально статической нагрузке в заданном диапазоне ее изменения. 2 ил.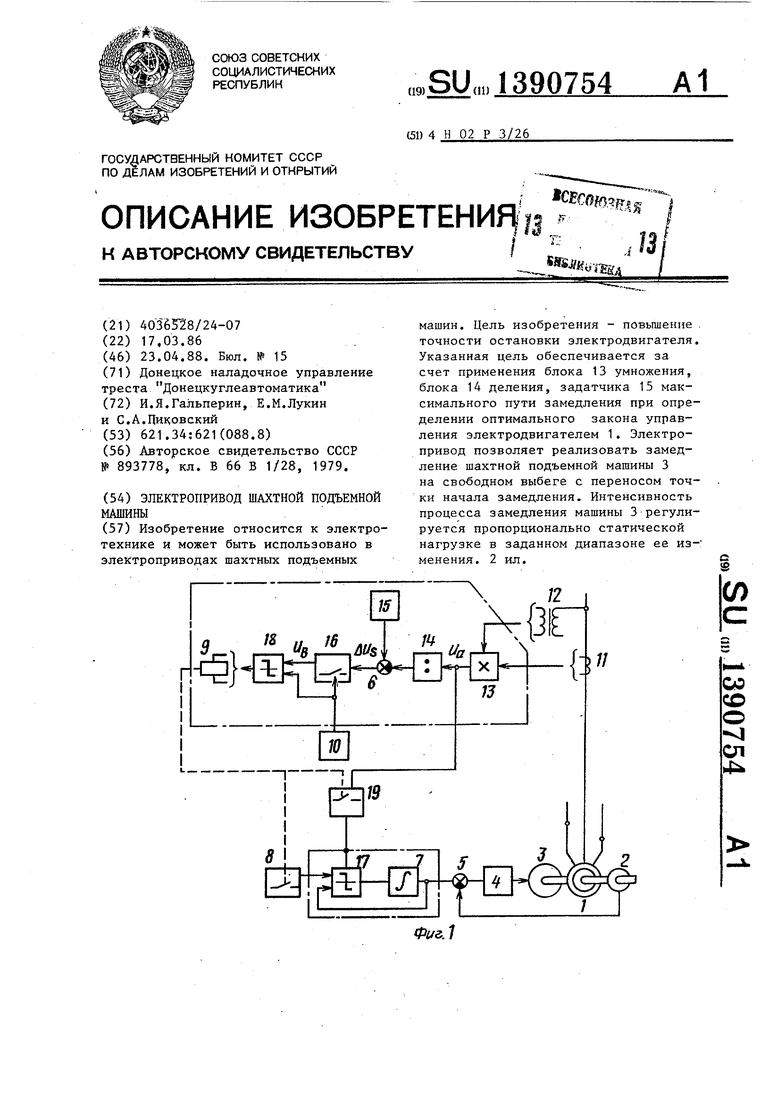
Фие.1
Изобретение относится к электро-- ехнике и может быть использовано электроприводах шахтных подъемных ашин.
Цель, изобретения повышение точности останова электродвигателя.
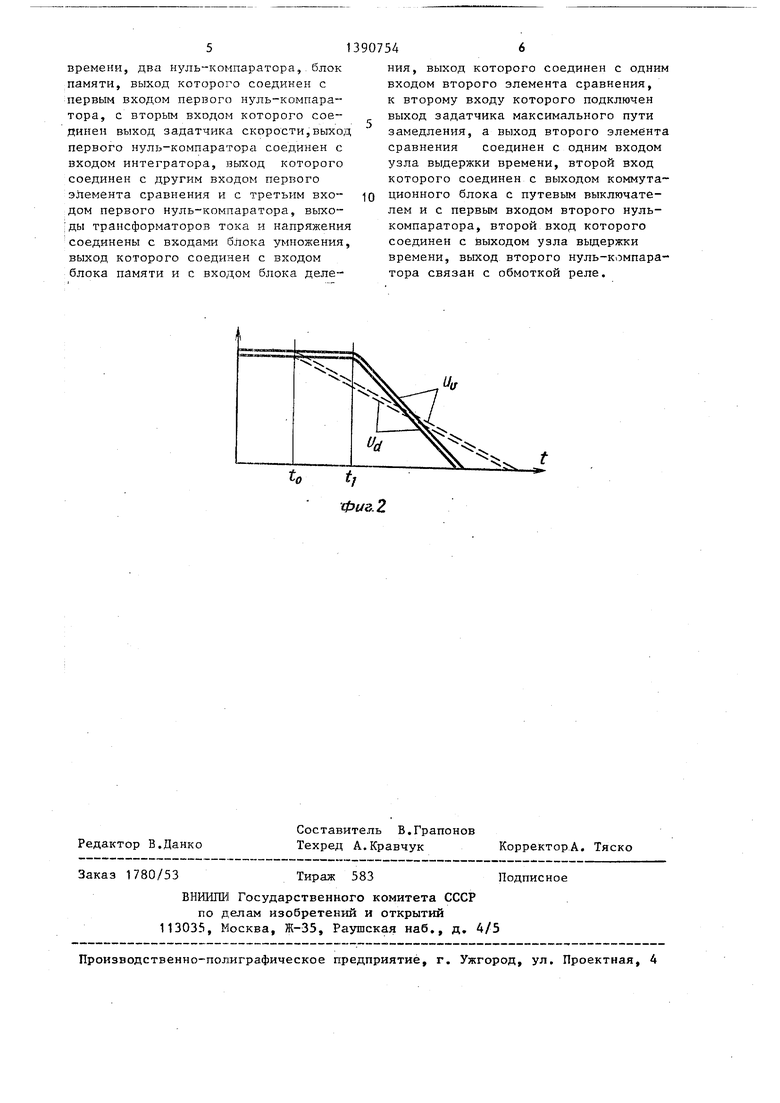
На фиг. 1 дана структурная схема электропривода; на фиг. 2 - диаграмма напряжений.
Устройство содержит трехфазный асинхронный электродвигатель 1,на валу которого установлены тахогене- ратор 2, шахтная подъемная машина 3 с электромеханическим тормозом, блок 4 управления которым соединен с выходом первого элемента 5 сравнения, один из входов которого связан с выходом тахогенератора 2,второй элемент 6 сравнения.,интегратор 7, задатчик 8 скорости, реле с обмоткой 9, коммутационный блок 10 с путевым выключателем,трансформаторы 11 и 12 тока и напряжения соответственно в цепях статорной обмотки электродвигателя 1, блок 13 умножения,блок 14 деления, задатчик 15 максимального пути замедления,зел 16 вьздержки времени, два нуль-компаратора 17 и 18, блок 19 памяти, выход которого соединен с первым входом первого нуль-компаратора 17, с вторым входом которого соединен выход задатчика 8 скорости.
Выход первого нуль-крмпаратора 17 соединен с входом интегратора 7, выход которого соединен с другим входом первого,элемента 5 сравнения и с третьим входом первого нуль-компаратора 17, выходы трансформаторов 11 И 12 тока и напряжения соответственно соединены с входами блока 13 умножения, выход которого соединен с входом блока 19 памяти и с входом блока 14 деления,, выход которого соединен с одним входом второго элемен- иа 6 сравнения, к второму входу которого .подключен выход задатчика 15 максимального пути замедления, а вы-, ход второго элемента 6 сравнения соединен с одним входом узла 16 вы- времени, второй вход которого соединен с выходом коммутационного блока 10 с путевым выключателем и с первым входом второго нуль-компаратора 18, второй вход которого соединен с выходом узла 16 выдержки времени, выход второго нуль-компаратора 18 связан с обмоткой 9 реле.
Электропривод работает следующим образом.
Потребляемая двигателем 1 мощ- ность определяется в блоке 13 умножения путем перемножения в четырех квадратных выходных сигналов от трансформаторов 11 и 12 тока и напряжения (фиг. 1).Потребляемая мощность
Р
потр
, статическая нагрузка FC и замедление о в период движения с максимальной скоростью V,o(Kc связаны между собой соотношениями
Рпотр 1. ;
F,; ma,
КПД двигателя и механизма; приведенная масса движущихся частей;
где п.
m
Откуда
РПОТР
m
мак,с
Так как V,- const, а для активной статической нагрузки (например, поднимаемого груза) можно так1-1же полагать - const, то ожидаm
емая величина замедления а пропорциональна потребляемой мощности РПОТР Поэтому сигнал U на выходе блока 13 пропорционален также и ожидаемому замедлению а.
Путь замедления S связан с замедлением а известным соотношением
2 (kC
S
2а
40
Поэтому для определения сигнала ., пропорционального ожидаемому пути
замедления S, в блоке 14 производится операция деления постоянного по величине сигнала на сигнал Ь ,,. Во втором элементе 6 сравнения определяется разность .ulJ Ug макс Hg, которая поступает на вход узла 16 вьвдержки времени.Чтобы при различной величине статической нагрузки процесс замедления оканчивался в одной
и той же точке пути, выдержка времени tg(,,д на отключение двигателя 1 от питающей сети должна составлять
/з з
5
бЫА V
маис
где & S
S
- S (л,«кг аксиMdKC
мальный путь замедтгения, которому пропорционален сигнал Us макг .
Формируемая в узле 16 вьщержка времени должна быть пропорциональна сигналу , . Реализуется это,например, следующим образом. Во время движения подъемных сосудов вне зоны замедления сигнал U на выходе узла 16, выполненного по одной из известных схем, поддерживается пропорциональным сигналу /3Ug. В фиксиро- ванной точке пути, соответствующей началу замедления для пути замедления срабатывает коммутацион- ньш блок 10 с путевым выключателем (момент времени t на фиг. 2). В-.ре- зультате начинается процесс уменьшения сигнала Ug с постоянной интенсивностью. Поэтому время, необходимое для уменьшения сигнала U. до
О
нуля, пропорционально только вели- чине этого сигнала. Когда сигнал Ug уменьщится до нуля, обратится в нуль и напряжение на выходе нуль- компаратора 18. Б результате напряжение на обмотке 9 реле обратится в нуль и тем самым будет подана команда на отключение электродвигателя 1 от. питающей сети (т.е. на начало замедления в момент времени t ). Если статическая нагрузка столь ма- ла, что сигнал Uj уменьшился до нуля или даже изменил свой знак еще до срабатывания коммутационного блока 10 с путевым выключателем,то обмотка 9 реле удерживается во вклю- ченном состоянии за счет поступления на вход нуль-компаратора 18 положительного сигнала и отключается в момент времени t (т.е. без вьщер- жки времени).
В ходе замедления интенсивность сигнала по.какой-либо причине может оказаться недостаточной для остановки машины в заданной точке пути (например, в режиме спуска груза пос ле отключения электродвигателя от питающей сети будет происходить даже увеличение скорости). Поэтому предусмотрена возможность принудительного торможения машины в функции
ошибки по скорости ли Uv - Uj(
с помощью блока 4 (выполненного, например, на основе регулируемого механического тормоза) и динамического торможения электродвигателя 1. Для этого в момент.начала замедления реле с обмоткой 9 ра змыкает свой контакт в задатчике 8 скорости и тем самым подает команду на умень
O 5
0 5 О 0
0
5
шение по линеигтому закону сигнала Uy заданной скорости, а также размыкает контакт в б:токе 19 памяти.
Выполненный по одной из известных схем блок 19 памяти работает как пропорциональное звено, если контакт обмотки реле замкнут, а в момент размыкания контакта (т.е. в момент начала замедления) запоминает текущее значение сигнала 11, которое поступает на вход нуль-компаратора 18 и используется в качестве опорного потенциала в цепи отсечки этого нуль-компаратора по напряжению. Поэтому сигнал U на выходе первого нуль-компаратора 17 и соответственно интенсивность уменьшения сигнала и так же,как и сигнала U) пропорциональны этому значению сигнала UQ,, т.е. статистической нагрузке. При этом схема нуль-компаратора 18 выполнена таким образом, что при достаточно малом сигнале U, сигнал Uf, и соответственно интенсивность уменьшения сигнала U у не мо- гут быть меньше некоторого минимума, соответствующего началу замедления в момент срабатывания кoм ryтaциoннo- го блока 10 с путевым выключателем, т.е. в момент времени t,, (фиг. 2), Таким образом, изобретение обеспечивает сочетание точности работы, гибкости и приспосабливаемосфи электродвигателя к меняющимся условиям эксплуатации.
Формула изобретения
Электропривод шахтной подъемной машины, содержащий трехфазный асинхронный электродвигатель, на валу которого установлены тахогенератор, шахтная подъемная машина с электромеханическим тормозом, блок управления которым соединен с выходом первого элемента сравнения, один из входов которого связан с выходом та- хогенератора, второй элемент сравнения, интегратор, задатчик скорости, реле, коммутационный блок с путевым выключателем, отличающий- с я тем,что,с целью повьш1ения точности останова электродвигателя, в него введены трансформаторы тока и напряжения в цепях статорной обмотки электродвигателя, блок умножения блок деления, задатчик максимального пути замедления, узел вьщержки
5
времени, два нуль-компаратора,.блок памяти, выход которого соединен с первым входом первого нуль-компаратора, с вторым входом которого соединен выход задатчика скорости,выхо первого нуль-компаратора соединен с входом интегратора, выход которого соединен с другим входом первого элемента сравнения и с третьим вхо- дом первого нуль-компаратора, выхо- :ды трансформаторов тока и напряжени соединены с входами блока умножения выход которого соединен с входом блока памяти и с входом блока деле
ния
, выход которого соединен с одним входом второго элемента сравнения, к второму входу которого подключен выход задатчика максимального пути замедления, а выход второго элемента сравнения соединен с одним входом узла выдержки времени, второй вход которого соединен с выходом коммутационного блока с путевым выключателем и с первым входом второго нуль- компаратора, второй вход которого соединен с выходом узла вьщержки времени, выход второго нуль-компаратора связан с обмоткой реле.
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
