СО
ас со IND
со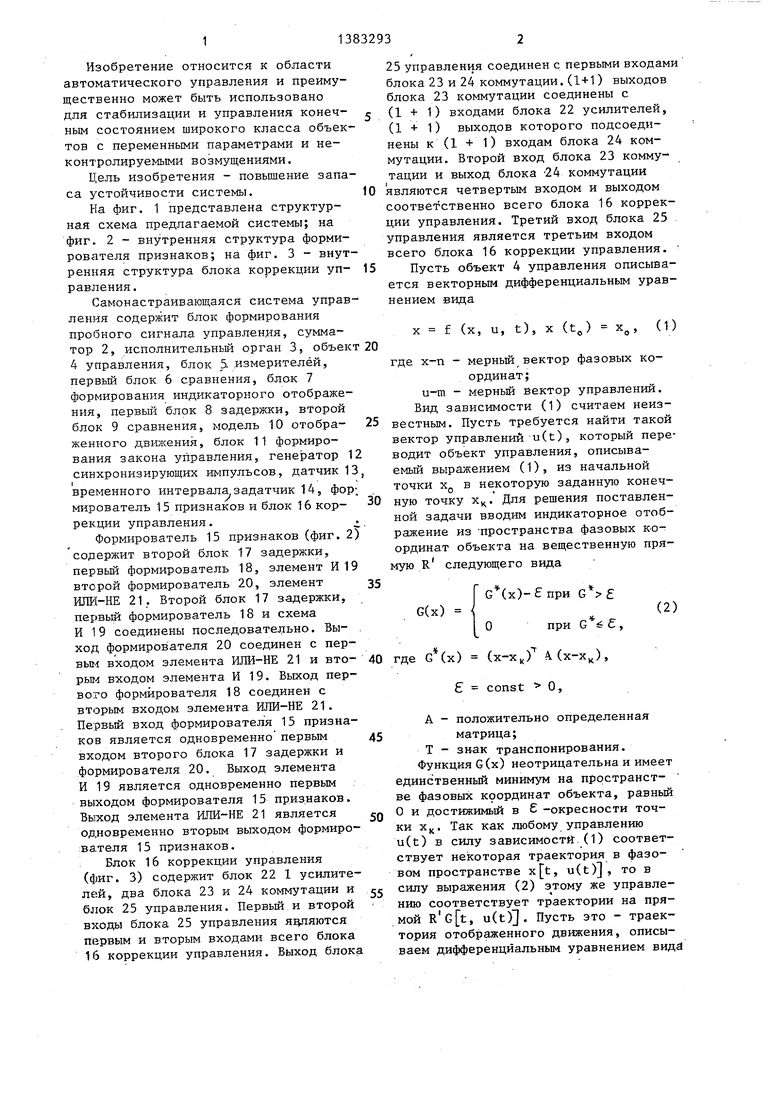

| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1986 |
|
SU1418649A1 |
| Система экстремального управления | 1988 |
|
SU1550474A1 |
| Система терминального управления упругим объектом | 1987 |
|
SU1434403A1 |
| Устройство для активного демпфирования упругих колебаний элементов конструкции вращающегося объекта | 1983 |
|
SU1134927A1 |
| УСТРОЙСТВО ДЛЯ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ | 2014 |
|
RU2541109C1 |
| Система управления | 1984 |
|
SU1173388A1 |
| Способ итерационного измерения рассогласования в двумерных следящих системах и устройство для его осуществления | 2019 |
|
RU2733262C1 |
| ИМПУЛЬСНЫЙ СВЕРХШИРОКОПОЛОСНЫЙ ДАТЧИК ДИСТАНЦИОННОГО МОНИТОРИНГА ДЫХАНИЯ И СЕРДЦЕБИЕНИЯ | 2008 |
|
RU2392852C2 |
| Тренажер сварщика | 1984 |
|
SU1217151A1 |
| Устройство для управления трехфазнымАВТОНОМНыМ иНВЕРТОРОМ | 1979 |
|
SU809470A1 |
Изобретение относится к автоматическому управлению и может быть использовано для стабилизации и управления широкого класса объектов с переменными параметрами и неконтролируемыми возмущениями. Целью изобретения является повьшение запаса устойчивости системы. Цель достигается тем, что самонастраивающаяся система, содержащая блок 1 формирования пробного управления, сумматор 2, исполнительный орган 3, объект 4 управления, блок 5 измерителей, первый блок 6 сравнения, блок 7 формирования индикаторного отображения, первый блок 8 задержки, второй блок 9 сравнения, модель 10 отображенного движения, 15лок 1 1 формирования закона управления, генератор 12 синхронизирующих импульсов, датчик 13 временного интервала и задатчик 14, дополнительно имеет формирователь 15 признаков и блок 16 коррекции управления. 3 ил. И (/)
Фиг.1
Изобретение относится к области автоматического управления и преимущественно может быть использовано для стабилизации и управления конеч- ным состоянием широкого класса объектов с переменными параметрами и неконтролируемыми возмущениями.
Цель изобретения - повьшение запаса устойчивости системы.
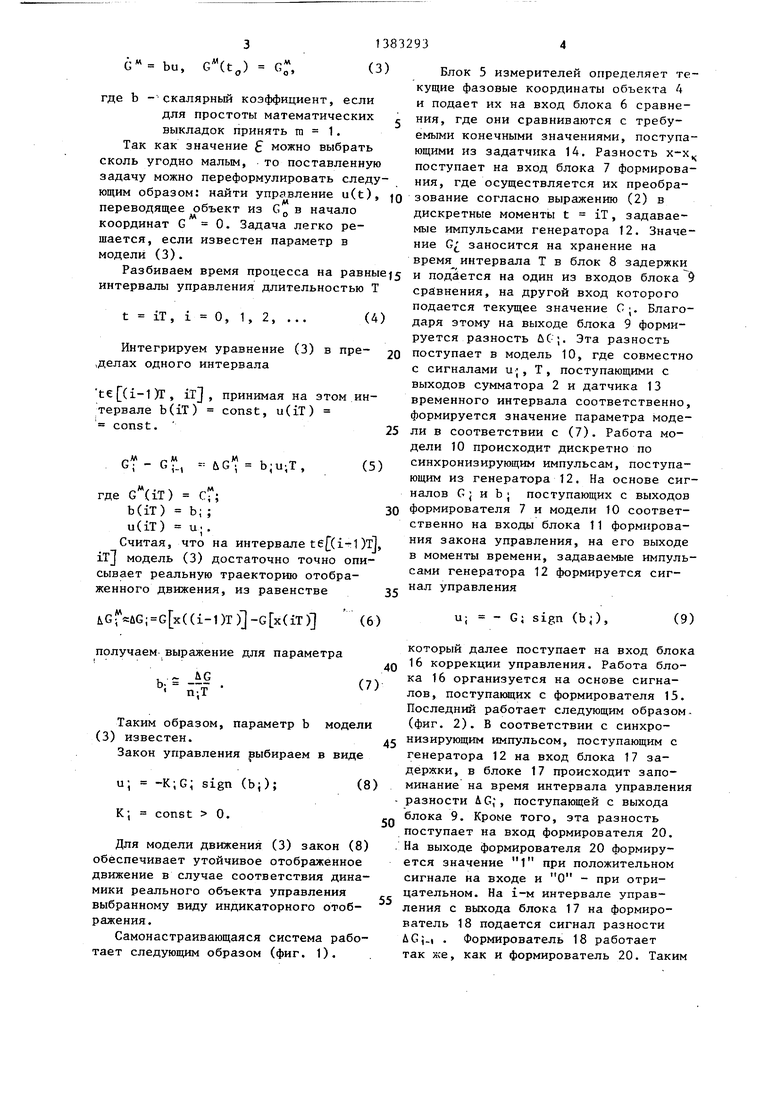
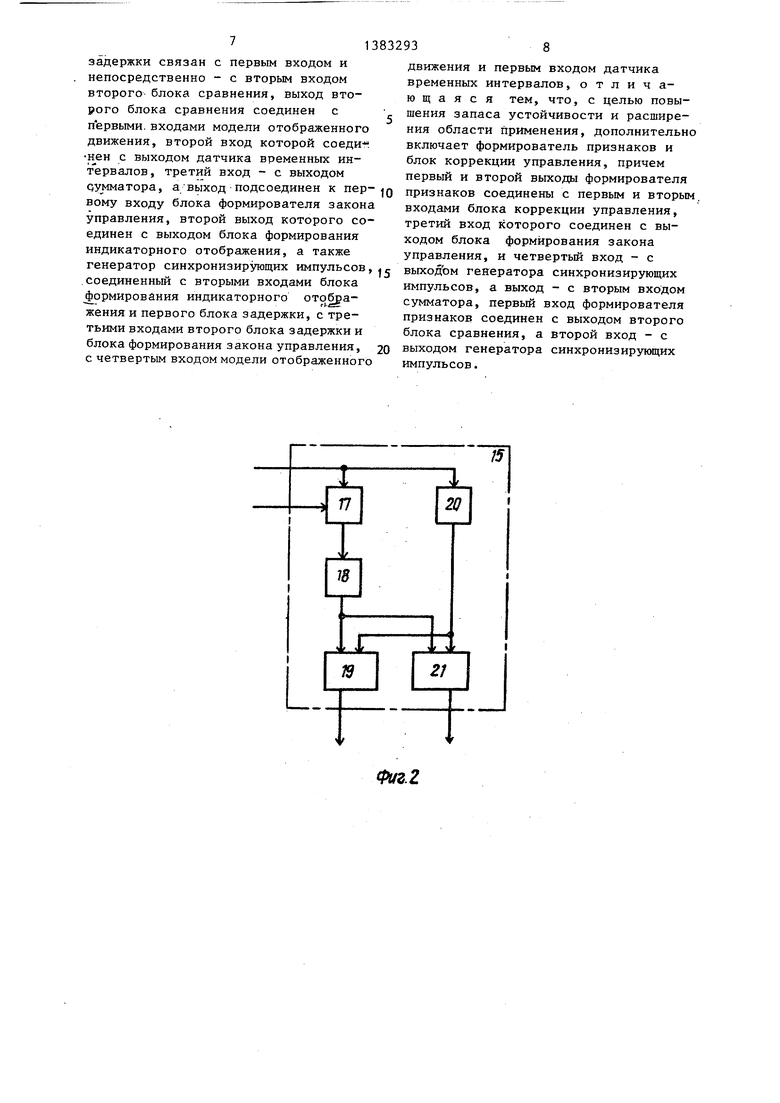
Fla фиг. 1 представлена структурная схема предлагаемой системы; на фиг.. 2 - внутренняя структура формирователя признаков; на фиг. 3 - внутренняя структура блока коррекции уп- равления.
Самонастраивающаяся система управления содержит блок формирования пробного сигнала управления, сумматор 2, исполнительньй орган 3, объект 4 управления, блок 5. измерителей, первый блок 6 сравнения, блок 7 формирования индикаторного отображения, первый блок 8 задержки, второй блок 9 сравнения, модель 10 отобра- женного двил :ения, блок 11 формирования закона управления, генератор 1 синхронизирующих импульсов,, датчик 13 временного интервала задатчик 14, фор мирователь 15 признаков и блок 16 кор- рекции управления..
Формирователь 15 признаков (фиг. 2) содержит второй блок 17 задержки, первый формирователь 18, элемент И 19 второй формирователь 20, элемент ШШ1-НЕ 21. Второй блок 17 задержки, иервьй формирователь 18 и схема И 19 соединены последовательно. Вы- ход формирователя 20 соединен с первым входом элемента ИЛИ-НЕ 21 и вто- рым входом элемента И 19. Выход первого формирователя 18 соединен с вторым входом элемента ИЛИ-НЕ 21. Первый вход формирователя 15 признаков является одновременно первым входом второго блока 17 задержки и формирователя 20. Выход элемента И 19 является одновременно первым выходом формирователя 15 признаков. Выход элемента ИЛИ-НЕ 21 является одновременно вторым выходом формиро- :ва.теля 15 признаков.
Блок 16 коррекции управления (фиг. 3) содержит блок 22 1 усилителей, два блока 23 и 24 коммутации и блок 25 управления. Первый и второй входы блока 25 управления являются первым и вторым входами всего блока 16 коррекции управления. Выход блока
25 управления соединен с первыми входам блока 23 и 24 коммутации.(1+1) выходов блока 23 коммутации соединены с (1 + 1) входами блока 22 усилителей, (1+1) выходов которого подсоединены к (1 +1) входам блока 24 коммутации. Второй вход блока 23 коммутации и выход блока 24 коммутации являются четвертым входом и выходом соответственно всего блока 16 коррекции управления. Третий вход блока 25 управления является третьим входом всего блока 16 коррекции управления. Пусть объект 4 управления описывается векторньш дифференциальным уравнением вида
X f (х, U, t), X
(4) X,
(1)
где х-п - мерньш вектор фазовых координат;
u-m - мерньй вектор управлений. Вид зависимости (1) считаем неизвестным. Пусть требуется найти такой вектор управлений u(t), который переводит объект управления, описываемый выражением (1), из начальной точки XQ в некоторую заданную конечную точку х,. Для решения поставленной задачи вводим индикаторное отображение из пространства фазовых координат объекта на вещественную пряную R следующего вида
G(x)
G(x)-SnpH G
(2
О при G б, где G (х) (х-х) А(х-х), const О,
А - положительно определенная матрица;
Т - знак транспонирования. Функция G(X) неотрицательна и имеет единственный минимум на пррстранст- ве фазовых крординат объекта, равный О и достижимый в -окресности точки х. Так как любому управлению u(t) в силу зависимости.(1) соответствует некоторая траектория в фазовом пространстве , u(t)J, то в силу выражения (2) этому же управлению соответствует траектории на прямой , u(t). Пусть это - траектория отображенного движения, описываем дифференциальным уравнением вид
с bu,
,) G;,
где b - скалярный коэффициент, если
для простоты математических выкладок принять га 1.
Так как значение f можно выбрать сколь угодно малым, то поставленную задачу можно переформулировать следующим образом: найти управление u(t), переводящее объект из G в начало координат G 0. Задача легко решается, если известен параметр в модели (3).
Разбиваем время процесса на равные интервалы управления длительностью Т
t IT, i О, 1, 2, ... (4)
Интегрируем уравнение (3) в пре- 20 ,делах одного интервала
30
t€ (i-1 УГ , ilj , принимая на этом интервале b(iT) const, u(iT)
const.
сГbct b
iU;T,
где ) СГ;
b(iT) b; ;
u(iT) u;.
Считая, что на интервале te(i-1 )т|, irj модель (3) достаточно точно описывает реальную траекторию отображенного движения, из равенстве 35
iGf«uGi G x((i-1)T)(iT) (6)
30
получаем- выражение для параметра UG
- пГт-
Таким образом, параметр b модели (3) известен.45
Закон управления выбираем в виде
и; -K;G; sign (b;); К; const 0.
Для модели двгасения (3) закон (8) обеспечивает утойчивое отображенное движение в случае соответствия динамики реального объекта управления выбранному виду индикаторного отображения.
Самонастраивающаяся система работает следующим образом (фиг. 1).
3293
Q
Блок 5 измерителей определяет текущие фазовые координаты объекта 4 и подает их на вход блока 6 сравнения, где они сравниваются с требуемыми конечными значениями, поступающими из задатчика 14. Разность х-х поступает на вход блока 7 формирования, где осуществляется их преобразование согласно выражению (2) в дискретные моменты t il, задаваемые импульсами генератора 12. Значение G заносится на хранение на
Q
|5
20
5
35
время интервала Т в блок 8 задержки и подается на один из входов блока 9 сравнения, на другой вход которого подается текущее значение С;. Благодаря этому на выходе блока 9 формируется разность йС ;. Эта разность поступает в модель 10, где совместно с сигналами и;. Т, поступающими с выходов сумматора 2 и датчика 13 временного интервала соответственно, формируется значение параметра модели в соответствии с (7). Работа модели 10 происходит дискретно по синхронизирующим импульсам, поступающим из генератора 12. На основе сигналов G J и b; поступающих с выходов 30 формирователя 7 и модели 10 соответственно на входы блока 11 формирования закона управления, на его выходе в моменты времени, задаваемые импульсами генератора 12 формируется сигнал управления
U:
- G; sign (b;).
(9)
40
45
50
55
который далее поступает на вход блока 16 коррекции управления. Работа блока 16 организуется на основе сигналов, поступакмцих с формирователя 15. Последний работает следующим образом- (фиг. 2). В соответствии с синхронизирующим импульсом, поступающим с генератора 12 на вход блока 17 задержки, в блоке 17 происходит запоминание на время интервала управления разности iG;, поступающей с выхода блока 9. Кроме того, эта разность поступает на вход формирователя 20. На выходе формирователя 20 формируется значение 1 при положительном сигнале на входе и О - при отрицательном. На i-M интервале управления с выхода блока 17 на формирователь 18 подается сигнал разности AGj.i . Формирователь 18 работает так же, как и формирователь 20. Таким
образом, на выходах формирователей 18 и 20 и i-M интервале управления формируются сигналы sign (ЛС;., ) и sign (дС;) соответственно. Оба сигнала поступают на входы элементов И 19 и ИЛИ-НЕ 21. На выходах схем 19 и 21 формируются сигналы признаков
и
гii,j.соответственно, согласно выражениям
тг.
1, если sign (u,G;-,) 1 и sign () 1
(10)
О, во всех остальных случаях,
1, если sign (uGi-, ) 1 и sign (uG;) - 1
(11)20
О, во всех остальных случаях.
Сигналы признаков поступают на блок 16 коррекции управления, которы работает следующим образом (фиг. 3). При подаче сигнала на первый вход блока 25 управления на его выходе вырабатывается сигнал, согласно которому блоки 23 и 24 коммутации в цепь сигнала u(t) последовательно подключают один из усилителей блока 22 с ближайшим большим к предьщущему значением коэффициента К; из выражения (7). При подаче сигнала на второй вход блока 25 последний подключает в цепь сигнала u(t) один из усилителей блока 22 с ближайшим меньшим к предыдущему значением коэффициента К;. Изменение состояния блоков 23 и 24 коммутации происходит в дискретные моменты времени согласно синхронизирующим импульсам, поступающим на третий вход блока 25 управления с выхода генератора 12. Таким образом, на выходе блока 16 коррекции (фиг. 1) формируется сигнал управления согласно (7) .Изменение значения К в законе (7) происходит в случае выработки того или иного приз нака на выходах формирователя 15 в соответствии с выражением (10) и (11). Сигнал управления через сумматор 2 поступает на исполнительный орган 3, который осуществляет непосредственное изменение состояния объекта 4 управления. Блок 1 формирования пробного сигнала управления формирует некоторый фиксированный
0
5
0
25
30
35
40
45
50
55
сигнал лишь на первом интервале управления для обеспечения возможности идентификации параметра модели отображенного движения в выражении (3) на первом шаге, который используется для формирования сигнала управления на втором интервале управления. Далее необходимость в пробном управлении отпадает и блок 1 отключается. Деление всего процесса на интервалы управления вызвано тем, что лишь в пределах небольшого промежутка времени можно принять модель (3), не опасаясь далеко уйти от реального процесса.
Известная самонастраивающаяся система управления характеризуется невысоким запасом устойчивости и узкой областью применения, что проявляется в том, что в случае несоответствия динамики объекта виду индикаторного отображения (2) возможно возникновение неустойчивого движения вследствие того, что приращение ДС; остается положительным независимо от значения sign (bj) в выражении (8). В предлагаемой системе вероятность возникновения зацикливаний значительно уменьшена благодаря введению блоков 15 и 16.
Реализация предлагаемой системы не представляет особых трудностей, что обусловлено возможностью выполнения ее блоков на базе известных устройств и узлов электроники и автоматики. В частности, все блоки системы, за исключением дополнительно введенных формирователя признаков и блока коррекции управления, аналогичны соответствующим блокам известной системы управления.
Формула изобретения
Самонастраивающаяся система управления, содержащая блок формирования пробного сигнала управления, выход которого подключен к первому входу сумматора, выход которого соединен с входом исполнительного органа, выход которого через объект управления подключен к входу блока измерителей, выход блока измерителей связан с пер- вым входом первого блока сравнения, второй вход которого соединен с выходом задатчика, а выход первого блока сравнения соединен с входом блока формирования индикаторного отображения, выход которого через первый блок
задержки связан с первым входом и непосредственно - с вторым входом второго блока сравнения, выход второго блока сравнения соединен с первыми, входами модели отображенного движения, второй вход которой соеди- нен с выходом датчика временных ин- т ервалов, третий вход - с выходом думматора, а выход подсоединен к первому входу блока формирователя закона управления, второй выход которого соединен с выходом блока формирования индикаторного отображения, а также генератор синхронизирующих импульсов, .соединенный с вторыми входами блока формирования индикаторного жения и первого блока задержки, с третьими входами второго блока задержки и блока формирования закона управления, с четвертым входом модели отображенного
движения и первым входом датчика временных интервалов, отличающаяся тем, что, с целью повышения запаса устойчивости и расширения области применения, дополнительн включает формирователь признаков и блок коррекции управления, причем первый и второй выходы формирователя признаков соединены с первым и вторы входами блока коррекции управления, третий вход которого соединен с выходом блока формирования закона управления, и четвертый вход - с вьгход ом генератора синхронизирующих импульсов, а выход - с вторым входом сумматора, первый вход формирователя признаков соединен с выходом второго блока сравнения, а второй вход - с выходом генератора синхронизирующих импульсов.
Фиг.2
dS±
F., V -,-j V-И
J
Фцг.З
| Система автоматического управления | 1984 |
|
SU1168897A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
