Изобретение относится к автоматическому управлению и преимущественно может быть использовано для стабилизации и последовательного управления конечным состоянием широкого класса объектов с переменными параметрами и неконтролируемыми возмущениями.
Цель изобретения - повышение точности и расширение области применения системы.
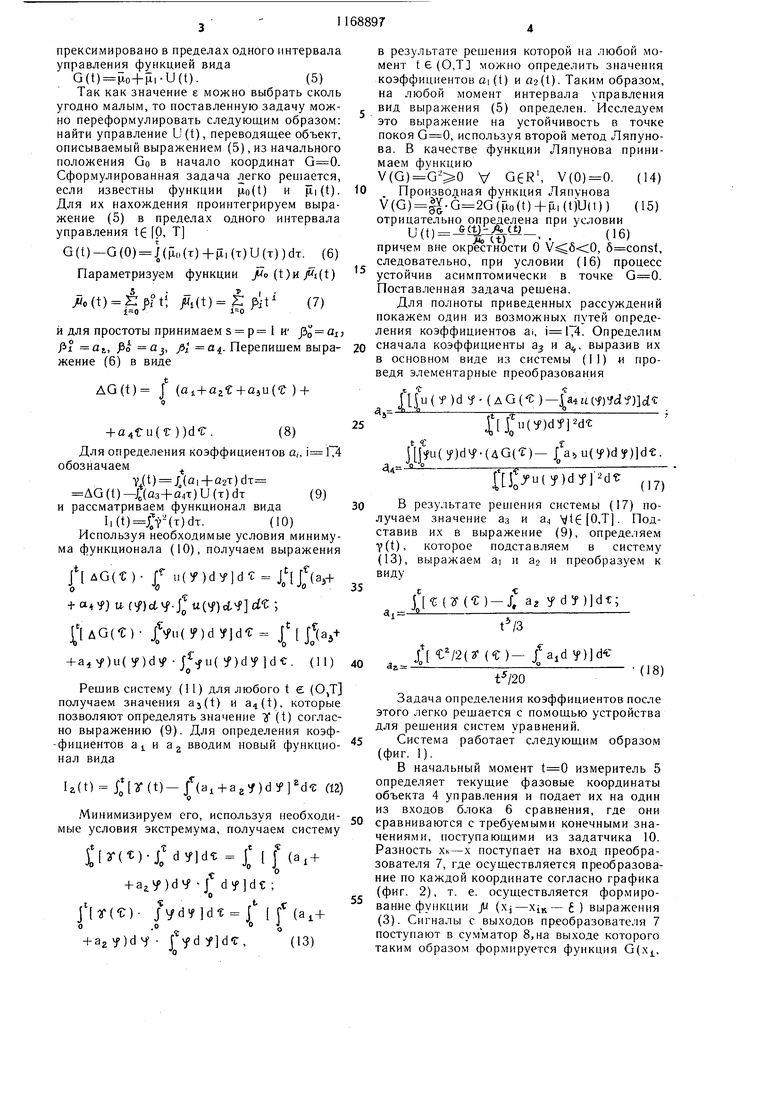
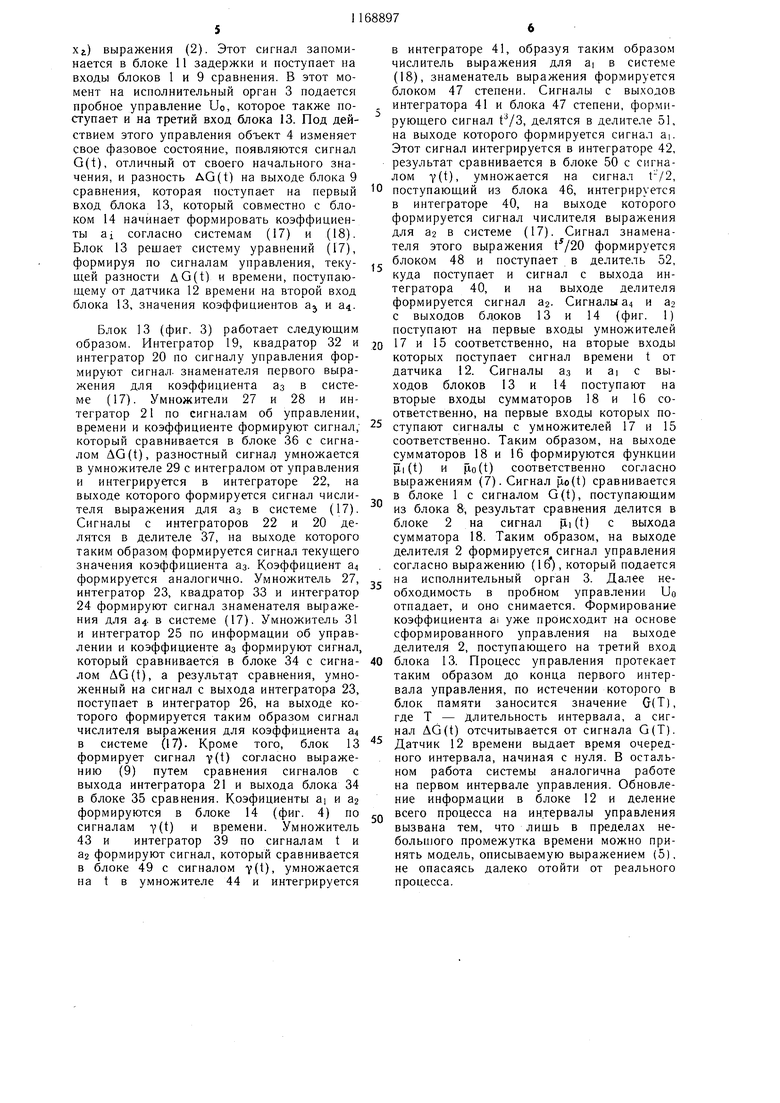
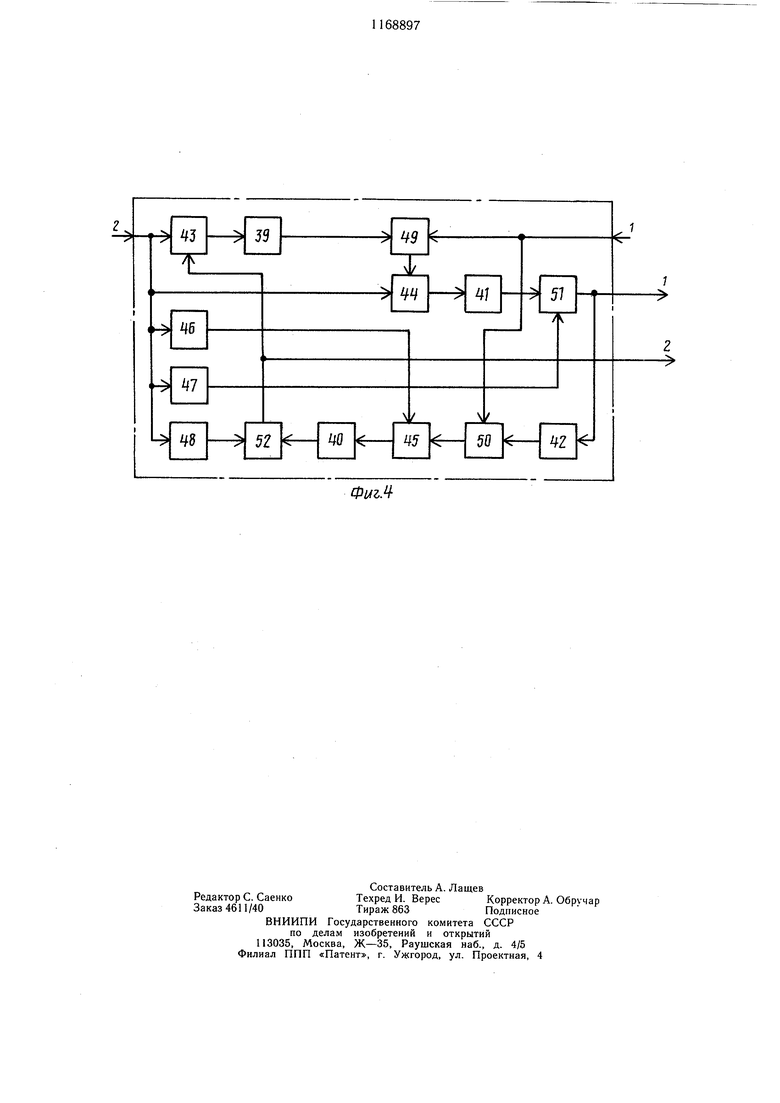
На фиг. 1 представлена структурная схема предлагаемой системы; на фиг. 2 - передаточная характеристика функционального преобразователя; на фиг. 3 и 4 - внутренняя структура соответственно первого и второго блоков решения системы уравнений.
Система автоматического управления (фиг. 1) содержит первый блок 1 сравнения, блок 2 деления, исполнительный орган 3, объект 4 управления, измерительное устройство 5, второй блок 6 сравнения, функциональный преобразователь 7, первый сумматор 8, третий блок 9 сравнения, задатчик 10, блок 11 задержки, датчик 12 времени, первый блок 13 решения системы уравнений, второй блок 14 решения системы уравнений, первый блок 15 умножения, второй сумматор 16, второй блок 17 умножения и третий сумматор 18. Первый блок 1 сравнения, блок 2 деления, исполнительный орган 3, объект 4 управления, измерительное устройство 5, второй блок 6 сравнения, функциональный преобразователь 7, первый сумматор 8 и третий блок 9 сравнения соединены последовательно. Датчик 12 времени, первый 13 и второй 14 блоки решения системы уравнений, первый блок 15 умножения и второй сумматор 16 соединены последовательно. Выход третьего блока 9 сравнения соединен с вторым входом первого блока 13 решения системы уравнений, второй .выход которого через второй блок 17 умножения и третий сумматор 18 подключен к второму входу блока 2 деления. Выход датчика 12 времени подключен к вторым входам второго блока 14 решения системы уравнений, первого 15 и второго 17 блоков умножения. Второй выход второго блока 14 решения системы уравнений соединен с вторым входом второго сумматора 16. Выход первого сумматора 8 соединен с первым входом первого блока 1 сравнения, второй вход которого соединен с выходом второго сумматора 16, и через блок И задержки с вторым входом третьего блока 9 сравнения. Выход блока 2 деления соединен с третьим входом первого блока 13 решения системы уравнений, третий выход которого соединен с вторым входом третьего сумматора 18.
Блок 13 (фиг. 3) содержит восемь интеграторов 19-26, пять умножителей 27-31, два квадратора 32 и 33, три блока 34-36 сравнения и делители 37 и 38. Первый вход блока 36 сравнения является первым входом всего блока 13. Первый вход умножителя 27
является вторым входом блока 13. Вход интегратора 19, второй вход умножителя 27 и первый вход умножителя 31 собраны в одну точку и образуют третий вход блока 5 13. Первый, второй и третий выходы блока 13 образованы соответственно выходами блока 35 сравнения, делителей 37 и 38.
Блок 14 (фиг. 4) содержит четыре ийтегратора 39-42, три умножителя 43-45, три блока 46-48 степени, два блока 49 и 50 сравнения и два делителя 51 и 52. Первый вход блока 49 сравнения является первым входом блока 14. Первые входы умножителей 43 и 44 и входы блоков 46-48 степени собраны в одну точку и образуj ют второй вход блока 14, выходы делителей 51 и 52 образуют соответственно первый и второй выходы блока 14.
Пусть объект управления описывается векторным дифференциальным уравнением вида
(X,U,t), X(to)Xo(1)
где X - n-мерный вектор фазовых координат; и - т-мерный вектор управлений.
Вид зависимости (1) считаем неизвестным. Пусть требуется найти такой вектор управлений U(t), который переводит объект управления, описываемый выражением (1), из начальной точки хо в некоторую заданную конечную точку хк. Для простоты математических выкладок принимаем и . Для решения поставленной задачи 0 вводим отображение из пространства фазовых координат объекта на вещественную прямую R следующего вида:
G(xi,x2)(i(xi-xiK--е)+ц(х2-XL X-е), ,(2)
5 где ( (х{-XjK.- )
{ ixi-XIK -f, ixj-х к1 t
p, |xi-XiJ b ,2.
(3)
Функция G (xi, X2) равна 0 в g-окрестности 0 конечной точки XK и сумме модулей отклонений текущих фазовых координат от их заданных значений, уменьшенных на е, вне этой окрестности. Таким образом функция G(XI, Х2) неотрицательна и имеет единственный минимум на пространстве фазовых 5 состояний объекта, равный О и достигаемый в 8 - окрестности точки х. Так как любому управлению U(t) в силу зависимости (1) соответствует некоторая траектория в фазовом пространстве X t, U(t), то в силу выражения (2) этому же управлению соответствует траектория на прямой , и (t) . Назовем ее отображенным движением. По аналогии с выражением (1) это движение можно описать некоторым дифференциальным уравнением
(G,U,t), G(Xo)Go.
(41
Разобьем время процесса на равные интервалы управления длительностью Т и примем, что выражение (4) может быть anпрексимировано в пределах одного интервала управления функцией вида G(t)(t).(5) Так как значение е можно выбрать сколь угодно малым, то поставленную задачу можно переформулировать следующим образом; найти управление U(t), переводящее объект, описываемый выражением (5), из начального положения GO в начало координат . Сформулированная задача легко рещается, если известны функции jlo(t) и ili(t). Для их нахождения проинтегрируем выражение (5) в пределах одного интервала управления tg О, Т G(t)-G(0) }(f,,(T)(T)U(T))dT. (6) Параметризу гм функции (t)(t) A(t) ipFtt A(t) |: jbh (7) и для простоты принимаем s р I и J3o fii аг., РО 0}, Pi aj,. Перепищем выраженке (6) в виде AG(t) / (ai+aj€-faju() + + a4Tu(T))dT.(8) Для определения коэффициентов а/, i 1 обозначаем 1.(t) ;,(a, + a2T)dT AG(t)-4(a3+a4T)U(T)dT(9) и рассматриваем функционал вида Ii(t)rf (T)dT. Используя необходимые условия минимума функционала (10), получаем выражения (t:)- / u(y) ;(аз+ 4-cx4f} u(/)ctsf-j u(vf)ii f cii:; AGCiT)- jy.(P) f 0аз+ Г, n /Irti 1 P W/ + a«y)u( y)dv( (:f). (11) o Рещив систему (11) для любого t е (О,Т получаем значения a5(t) и a4(t), которые позволяют определять значение У (t) согласно выражению (9). Для определения коэф-фициентов а I и а 2 вводим новый функционал вида Ia(t) (t)f(a,+a2) (12) о Минимизируем его, используя необходимые условия экстремума, получаем систему (C) { (а,+ + агУ)(1У f ; flfCC)- f (a,+ 0.00J, + a.,)d j yd ,(13) в результате решения которой на любой момент tе(О,ТЗ можно определить значения коэффициентов а (t) и «2(1). Таким образом, на любой момент интервала управления вид выражения (5) определен. Исследуем это выражение на устойчивость в точке покоя , используя второй метод Ляпунова. В качестве функции Ляпунова принимаем функцию V(G) V G6R, V(0)0. (14) Производная функция Ляпунова V(G)(iio(t)+H,|(tjU(t)) (15) отрицательно определена при условии U(t) mL|a, /(16) причем вне окрестности О , 6 const, следовательно, при условии (16) процесс устойчив асимптомически в точке . Поставленная задача решена. Для полноты приведенных рассуждений покажем один из возможных путей определения коэффициентов ai, 4. Определим сначала коэффициенты а и а, выразив их в основном виде из системы (И) и проведя элементарные преобразования и ( У )d f (А G СС )(f)d)cti: t J/Ky) (ip)dy-(4G(T)- jja5u()dy)d«. ( (,, В результате решения системы (17) получаем значение аз и а ,T. Подставив их в выражение (9), определяем V(t), которое подставляем в систему (13), выражаем ai и а2 и преобразуем к виду г;(Г(С) -; аг у dy)ldt; (гГ(С)- f a,dV)dC Задача определения коэффициентов после этого легко решается с помощью устройства для решения систем уравнений. Система работает следующим образом (фиг. 1). в начальный момент измеритель 5 определяет текущие фазовые координаты объекта 4 управления и подает их на один из входов блока 6 сравнения, где они сравниваются с требуемыми конечными значениями, поступающими из задатчика 10. Разность хк-X поступает на вход преобразователя 7, где осуществляется преобразование по каждой координате согласно графика (фиг. 2), т. е. осуществляется формирование функции JU (Xj-xiK-E ) выражения (3). Сигналы с выходов преобразователя 7 поступают в сумматор 8,на выходе которого таким образом формируется функция С(х, Хг) выражения (2). Этот сигнал запоминается в блоке 11 задержки и поступает на входы блоков 1 и 9 сравнения. В этот момент на иснолнительный орган 3 подается пробное управление Uo, которое также поступает и на третий вход блока 13. Под действием этого управления объект 4 изменяет свое фазовое состояние, появляются сигнал G(l), отличный от своего начального значения, и разность AG(t) на выходе блока 9 сравнения, которая поступает на первый вход блока 13, который совместно с блоком 14 начинает формировать коэффициенты ai согласно системам (17) и (18). Блок 13 решает систему уравнений (17), формируя по сигналам управления, текущей разности дО(1) и времени, поступающему от датчика 12 времени на второй вход блока 13, значения коэффициентов а и а.Блок 13 (фиг. 3) работает следующим образом. Интегратор 19, квадратор 32 и интегратор 20 по сигналу управления формируют сигнал, знаменателя первого выражения для коэффициента аз в системе (17). Умножители 27 и 28 и интегратор 21 по сигналам об управлении, времени и коэффициенте формируют сигнал, который сравнивается в блоке 36 с сигналом AG(t), разностный сигнал умножается в умножителе 29 с интегралом от управления и интегрируется в интеграторе 22, на выходе которого формируется сигнал числителя выражения для аз в системе (17). Сигналы с интеграторов 22 и 20 делятся в делителе 37, на выходе которого таким образом формируется сигнал текущего значения коэффициента аз. Коэффициент а формируется аналогично. Умножитель 27, интегратор 23, квадратор 33 и интегратор 24 формируют сигнал знаменателя выражения для а в системе (17). Умножитель 31 и интегратор 25 по информации об управлении и коэффициенте аз формируют сигнал, который сравнивается в блоке 34 с сигналом AG(t), а результат сравнения, умноженный на сигнал с выхода интегратора 23, поступает в интегратор 26, на выходе которого формируется таким образом сигнал числителя выражения для коэффициента а в системе (17). Кроме того, блок 13 формирует сигнал f(i) согласно выражению (9) путем сравнения сигналов с выхода интегратора 21 и выхода блока 34 в блоке 35 сравнения. Коэфициенты а и ад формируются в блоке 14 (фиг. 4) по сигналам Y(t) и времени. Умножитель 43 и интегратор 39 по сигналам t и а2 формируют сигнал, который сравнивается в блоке 49 с сигналом f{i), умножается на t в умножителе 44 и интегрируется в интеграторе 41, образуя таким образом числитель выражения для а в системе (18), знаменатель выражения формируется блоком 47 степени. Сигналы с выходов интегратора 41 и блока 47 степени, формирующего сигнал , делятся в делителе 51, на выходе которого формируется сигнал ai. Этот сигнал интегрируется в интеграторе 42, результат сравнивается в блоке 50 с сигналом Y(t), умножается на сигнал t-/2, поступающий из блока 46, интегрируется в интеграторе 40, на выходе которого формируется сигнал числителя выражения для аг в системе (17). Сигнал знаменателя этого выражения формируется блоком 48 и поступает в делитель 52, куда поступает и сигнал с выхода интегратора 40, и на выходе делителя формируется сигнал Нг. Сигналы а4 и а с выходов блоков 13 и 14 (фиг. 1) поступают на первые входы умножителей 17 и 15 соответственно, на вторые входы которых поступает сигнал времени t от датчика 12. Сигналы аз и а с выходов блоков 13 и 14 поступают на вторые входы сумматоров 18 и 16 соответственно, на первые входы которых поступают сигналы с умножителей 17 и 15 соответственно. Таким образом, на выходе сумматоров 18 и 16 формируются функции jli(t) и io(t) соответственно согласно выражениям (7). Сигнал fio(t) сравнивается в блоке 1 с сигналом G(t), поступающим из блока 8, результат сравнения делится в блоке 2 на сигнал pli(t) с выхода сумматора 18. Таким образом, на выходе делителя 2 формируется сигнал управления согласно выражению (16), который подается на исполнительный орган 3. Далее необходимость в пробном управлении Uo отпадает, и оно снимается. Формирование коэффициента ai уже происходит на основе сформированного управления на выходе делителя 2, поступающего на третий вход блока 13. Процесс управления протекает таким образом до конца первого интервала управления, по истечении которого в блок памяти заносится значение (j(T), где Т - длительность интервала, а сигнал AG(t) отсчитывается от сигнала G(T). Датчик 12 времени выдает время очередного интервала, начиная с нуля. В остальном работа системы аналогична работе на первом интервале управления. Обновление информации в блоке 12 и деление всего процесса на интервалы управления вызвана тем, что лишь в пределах небольшого промежутка времени можно принять модель, описываемую выражение.м (5), не опасаясь далеко отойти от реального процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1984 |
|
SU1171755A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Система идентификации колебаний присоединенного к объекту упругого элемента переменной жесткости | 1986 |
|
SU1432457A1 |
| Устройство для формирования сигнала управления с оптимальными коэффициентами обратной связи | 1984 |
|
SU1242913A1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ОРТОГОНАЛЬНЫХ ФУНКЦИЙ | 2005 |
|
RU2282891C1 |
| Устройство для решения систем дифференциальных уравнений | 1977 |
|
SU714406A1 |
| Субоптимальный фильтр для оценки параметра случайного процесса | 1989 |
|
SU1619307A1 |
| Квазиоптимальная по быстродействию система управления | 1981 |
|
SU987575A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2010 |
|
RU2437137C2 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ, содержащая последовательно соединенные первый блок сравнения, блок деления, исполнительный орган, объект управления, измерительное устройство, второй блок сравнения, функциональный преобразователь, первый сумматор и третий блок сравнения, второй вход второго блока сравнения соединен с выходом задатчика, выход первого сумматора - с первым входом первого блока сравнения, отличающаяся тем, что, с целью повышения точности и расширения области применения системы, она содержит блок задержки, последовательно соединенные датчик времени, первый блок решения системы уравнений, второй блок решения системы уравнений, первый блок умножения, второй сумматор и последовательно соединенные второй блок умножения и третий сумматор, выход первого сумматора через блок задержки соединен с вторым входом третьего блока сравнения, выход которого через первый блок решения системы уравнений соединен с первым входом второго блока умножения, выход датчика времени - с вторыми входами второго блока решения системы уравнений, первого блока умножения и второго блока умножения, третий выход первого блока решения системы уравнений соединен с вторым входом третьего сумматора, выход которого соединен с втоа рым входом блока деления, второй выход второго блока решения системы уравнений подключен к второму входу второго сумматора, выход которого соединен с вторым входом первого блока сравнения, выход блока деления соединен с третьим входом первого бл,ока решения системы уравнений. О) 00 оо
Фиг. 2
Фиг.З
.
| Громыко В | |||
| Д., Санковский Е | |||
| А | |||
| Самонастраивающиеся системы с моделью | |||
| - М | |||
| : Энергия, 1974, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
