J
СО
4 4
О 00
Изобретение относится к системам управления движением динамических объектов, а именно объектов с присое- AHHSHHijtMH упругими элементами, и мо с жет быть использовано для стабилизации упругих объектов с минимальным наполнением энергии упругих колебаний «
Целью изобретения является увели- 10 чение быстродействия систеьы в режиме стабилизации за счет снижения уровня возмущающего влияния колебаний упругих элементов конструкцииj а также повышение точности управле- 15 шя.
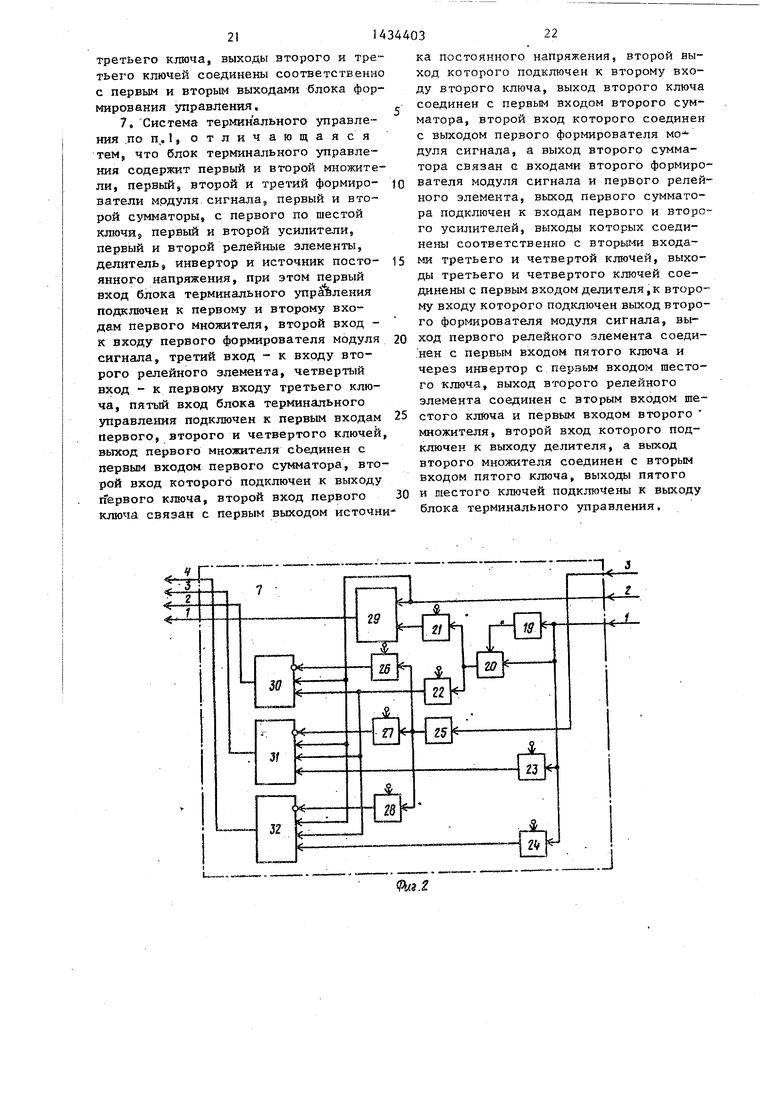
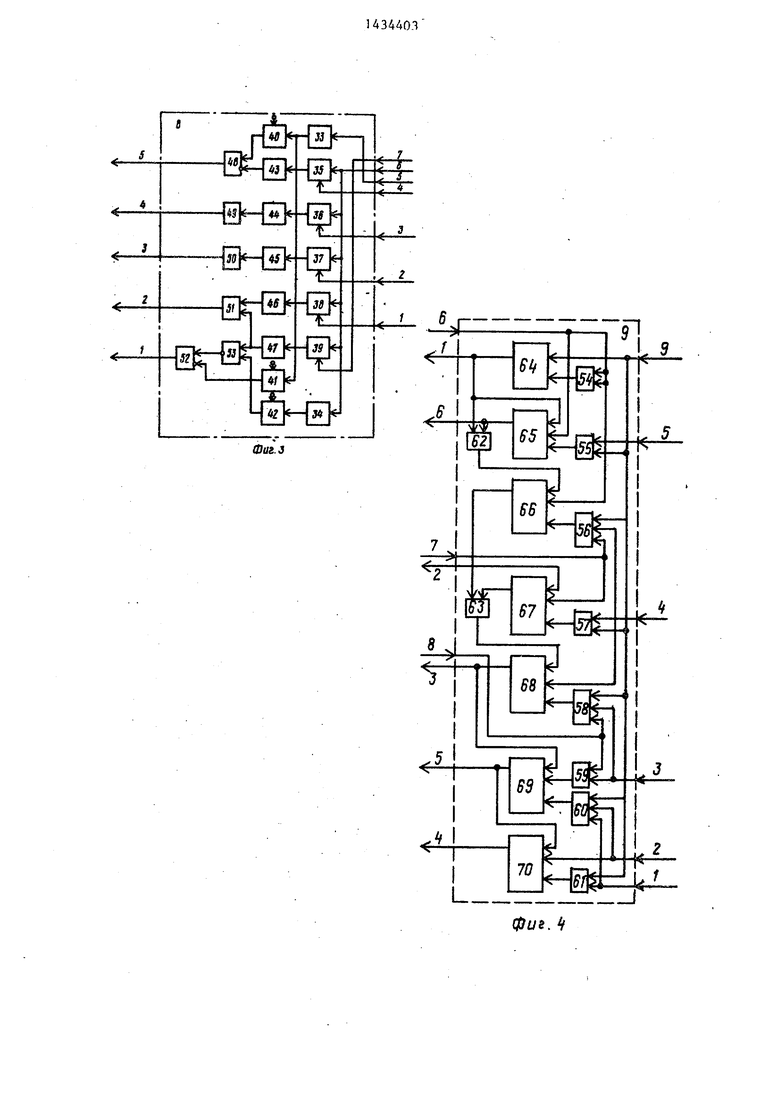
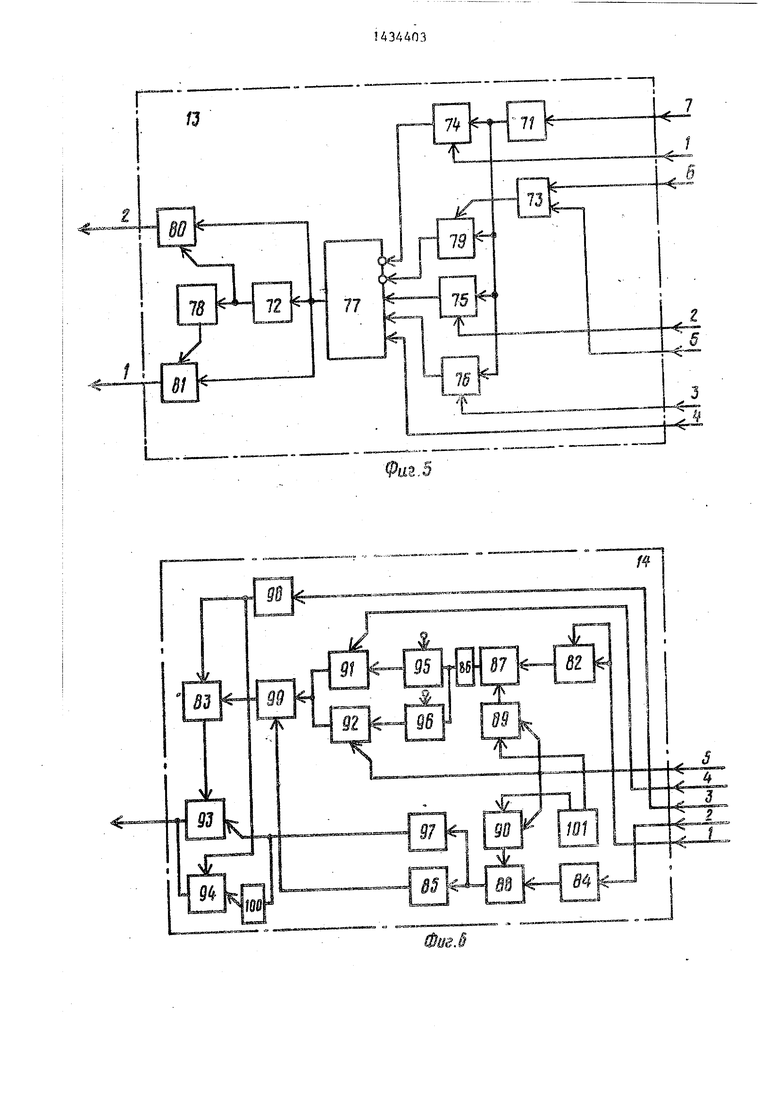
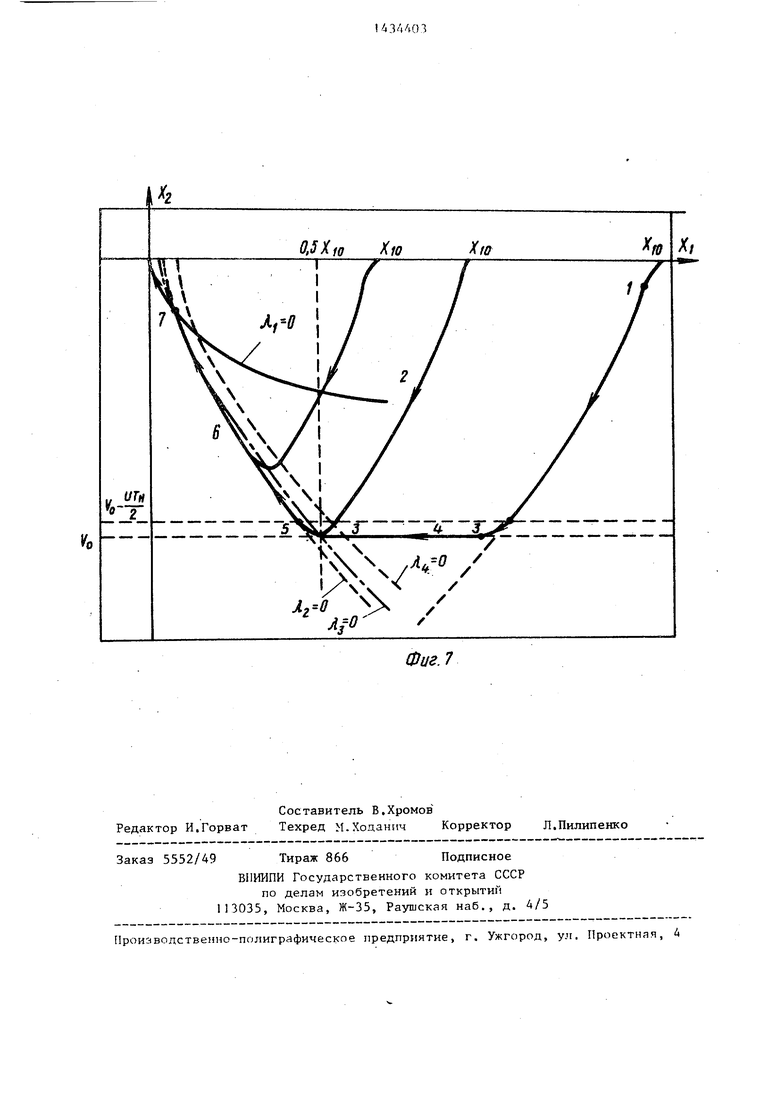
На фиг,1 представлена функциональная схема системы терминального уп- равления| на фиг,2 - блок формирований линий переключений на фиг.З - 20 блок формирования условий переключений на фиг,4 - управляющий ав-. томат, I на фиг.5 - блок,; формирования управления; на фиг,6 - блок терминального управления; на фиг.7 - 25 фазовые портреты движения системы.
Система терминального управле1шя упругим объектом представленная на фиг,19 содержит объект управления 1 блок исполнительных органов 2, датчик угла З, датчик скооости 4. зада тчик положения 5, блок сравнен гя 6,, блок формирования линий переключении 7, блок формирования условий переклк;- чения 85 управляющий автомат 9, пер- вый Юр втор.рй II, третий 12 блоки формирования линейного сигналаj блок фop иpoвaния управления I3j блок терминального управления 14.
Блоки формирования линейного сиг- 40 нала 10 - 12 содержат генератор линейного напряжетшя 15, первый инвертор 16, настраиваемый индикатор уровня 17; настраиваемый делитель напряжения 18
Блок 7 формирования линий переклю- 45 чения, представленный на фиг.2 содержит первый формирователь модуля сиг нала 19J первый множитель 20, первый, второй, тр етий и четвертый настраивае30
35
тый 39 множители, первый 40, второ 4 и третий 42 индикаторы уровня, вый 43 второй 44, третий 45, четв тый 46 и пятый 47 релейные элемент элемент ИЛИ 48, первый 49, второй инверторы, первый 51 и второй 52 э менты И, элемент И-НЕ 53.
Управляющий автомат 9, представ ньш на фиг„4, содержит первый 54, второй 55, третий 56s четвертый 57 пятый 58, шестой 59, седьмой 60, восьмой 6, девятый 62 и десятый 6 элементы ИЖ, первый 64, второй 65 третий 66j четвертый 67э пятый 68 шестой 69 и седьмой 70 триггеры.
Блок формирования управления 3 представленный на фиг,5, содержит первый 71 и второй 72 релейные эле менты, элемент ИЛИ 73, первый 74, рой 75 и третий 76 множители, сумм тор 77, инвертор 78,, первый 79, вт рой 80 и третий 81 ключи.
БЛОК терминального управления 1 представленный на фиг.6, содержит вый 82 и второй 83 множители, перв 84, второй 85 и 86 формиров тели модуля сигнала, первый 87 и в рой 88 сумматоры, первый 89j второ 90, третий 919 четвертьБ 92, пятый 93 и шестой 94 ключи, первый 95 и второй 96 усилители, первый 97 и в рой 98 релейные элементы, делитель 99, инвертор 100, источник постоян ного напряжения 101.
Колебания присоединенных упруго деформируемых элементов (УДЭ) конс рукции объекта управления являются полимодальными. В этом случае наи- более.качественное управление объе том может быть получено при плавно изменении величины нагружающего во действия. Строгий перевод всех осц ляторов в стационарнь е положения в можен лишь при устремлении времени нагружения в бесконечность. При ис пользовании наиболее простого в ре ализации линейного закона изменени нагружающего воздействия строго в
мые усилители напряжения 21-24, пер- о стационарное положение может быть вый релейный элемент 25, второйз третий и четвертый настраиваемые делители напряжения 26-28; первый, второй третий и четвертый сумматоры 29-32,
Блок 8 формирования условий перек-55 лючения, представленный на фиг.З,. содержит первый 33 и второй 34 формиропереведен один наиболее низкочасто ный или наиболе е важный тон упругих колебаний, а для остальных при этом создаются более мягкие услови нагружения. Процесс нарастания наг жающего воздействия должен быть за кончен строго за время, равное пер оду колебаний управляемой гармоник T.w 2 /w, где w- круговая частота
ватели модуля сигнала5- первый 35;, второй 36, 37 э четвертый 38 и пя-.
с
0 5
0 5
0
5
0
5
тый 39 множители, первый 40, второй 4 и третий 42 индикаторы уровня, первый 43 второй 44, третий 45, четвертый 46 и пятый 47 релейные элементы, элемент ИЛИ 48, первый 49, второй 50 инверторы, первый 51 и второй 52 элементы И, элемент И-НЕ 53.
Управляющий автомат 9, представлен- ньш на фиг„4, содержит первый 54, второй 55, третий 56s четвертый 57, пятый 58, шестой 59, седьмой 60, восьмой 6, девятый 62 и десятый 63 элементы ИЖ, первый 64, второй 65, третий 66j четвертый 67э пятый 68, шестой 69 и седьмой 70 триггеры.
Блок формирования управления 3, представленный на фиг,5, содержит . первый 71 и второй 72 релейные элементы, элемент ИЛИ 73, первый 74, вто рой 75 и третий 76 множители, сумматор 77, инвертор 78,, первый 79, второй 80 и третий 81 ключи.
БЛОК терминального управления 14, представленный на фиг.6, содержит первый 82 и второй 83 множители, первый 84, второй 85 и 86 формирователи модуля сигнала, первый 87 и второй 88 сумматоры, первый 89j второй 90, третий 919 четвертьБ 92, пятый 93 и шестой 94 ключи, первый 95 и второй 96 усилители, первый 97 и второй 98 релейные элементы, делитель 99, инвертор 100, источник постоянного напряжения 101.
Колебания присоединенных упруго- деформируемых элементов (УДЭ) конструкции объекта управления являются полимодальными. В этом случае наи- более.качественное управление объектом может быть получено при плавном изменении величины нагружающего воздействия. Строгий перевод всех осцил- ляторов в стационарнь е положения возможен лишь при устремлении времени нагружения в бесконечность. При использовании наиболее простого в реализации линейного закона изменения нагружающего воздействия строго в
стационарное положение может быть
переведен один наиболее низкочастотный или наиболе е важный тон упругих колебаний, а для остальных при этом создаются более мягкие условия нагружения. Процесс нарастания нагружающего воздействия должен быть закончен строго за время, равное периоду колебаний управляемой гармоники: T.w 2 /w, где w- круговая частота
собственш.х колебаний. В более общем случае время окончания переходного процесса может быть кратно целому числу периодов, т.е. , где 7
Г } о
Характерной чертой предлагаемого алгоритма управления является отсутствие необходимости использования текущей информации об упругих колеба ниях УДЭ.
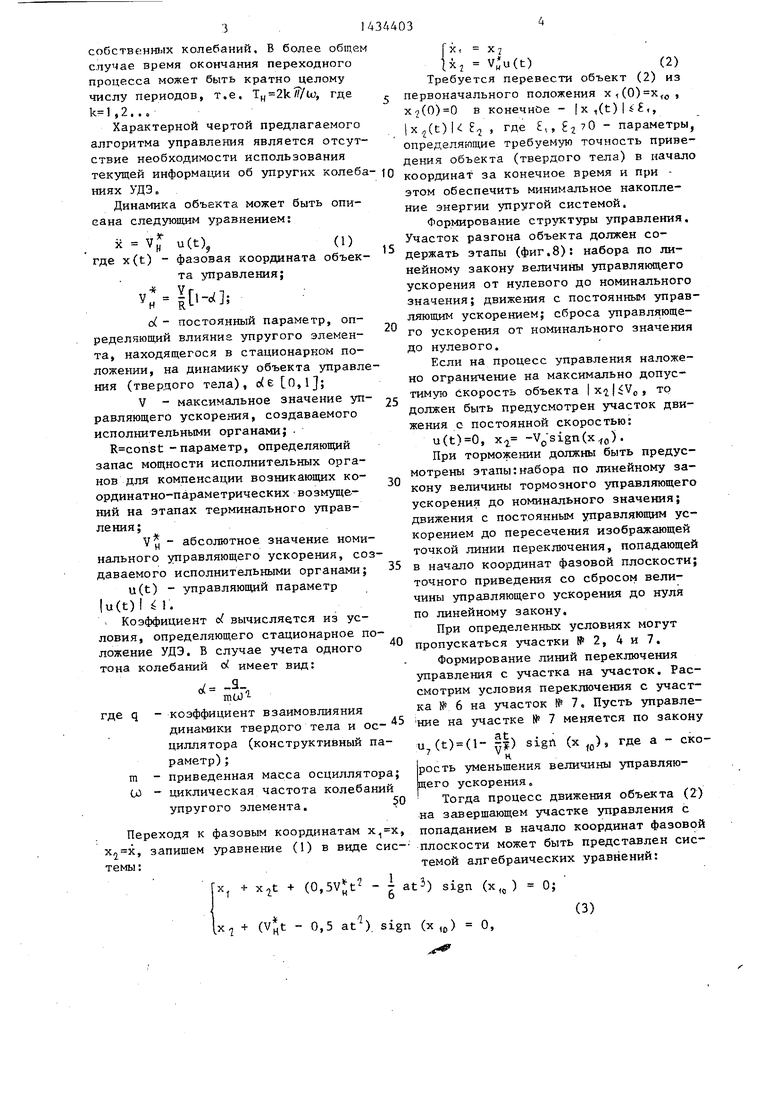
Динамика объекта может быть описана следующим уравнением; ,
ii V
н
u(t)
(1)
где x(t) - фазовая координата объекта управления; Y
Н R
d. постоянный параметр, определяющий влияние упругого элемента, находящегося в стационарном по- , на динамику объекта управления (твердого тела), o(,ljj
V - максимальное значение управляющего ускорения, создаваемого исполнительными органами;
R const - параметр, определяющий запас мощности исполнительных органов для компенсации возникающих ко- ординатно-параметрических возмущений на этапах терминального управления;
V ц - абсолютное значение номинального управляющего ускорения, создаваемого исполнительными органами;
u(t) - управляющий параметр |u(t)l П.
Коэффициент 0 вычисляется из условия, определяющего стационарное положение УДЭ. В случае учета одного тона колебаьшй о имеет вид:
«; -2-,
тЫ где q - коэффициент взаимовлияния
динамики твердого тела и осциллятора (конструктивный праметр) ;
m - приведенная масса осциллято W - циклическая частота колебан упругого элемента.
Переходя к фазовым координатам х , запишем уравнение (1) в виде темы:
а- ю
15
20
25
30
а35
40
, 45
X, Х2
х V(t)(2)
Требуется перевести объект (2) из первоначального положения х,(0)х,д, Х2(0)0 в конечное - |x,(t)U,,
|x(t)U Е-2 Д - параметры, определяющие требуемую точность приведения объекта (твердого тела) в начало координат за конечное время и при - этом обеспечить минимальное накопление энергии упругой системой.
Формирование структуры управления, Участок разгона объекта должен содержать этапы (фиг.8) набора по линейному закону величины управляющего ускорения от нулевого до номинального значения; движения с постоянным управляющим ускорением; сброса управляющего ускорения от номинального значения до нулевого.
Если на процесс управления наложено ограничение на максимально допустимую екорость объекта , то должен быть предусмотрен участок движения с постоянной скоростью:
u(t)0, х -Vp sign().
При торможении должны быть предусмотрены этапы:набора по линейному закону величины тормозного управляющего ускорения до номинального значения; движения с постоянным управляющим ускорением до пересечения изображающей точкой линии переключения, попадающей в начало координат фазовой плоскости; точного приведения со сбросом величины управляющего ускорения до нуля по линейному закону.
При определенных условиях могут пропускаться участки № 2, 4 и 7.
Формирование линий переключения управления с участка на участок. Рассмотрим условия переключения с участка № 6 на участок № 7. Пусть управле- ние на участке № 7 меняется по закону
;U(t)(l- ||) sign
,Н .
(х ..), где а -
рость уменьшения величины управляю- шего ускорения.
Тогда процесс движения объекта (2) на завершающем участке управления с попаданием в начало координат фазовой плоскости может быть представлен системой алгебраических уравнений:
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1985 |
|
SU1381445A1 |
| Система стабилизации объекта с присоединенным упругим элементом переменной жесткости | 1988 |
|
SU1603340A1 |
| Система управления объектом с присоединенным упругодеформируемым элементом | 1986 |
|
SU1403015A1 |
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1987 |
|
SU1500990A2 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Аналого-цифровое множительное устройство | 1983 |
|
SU1124346A1 |
| Цифровая система управления | 1986 |
|
SU1439531A1 |
| Устройство для активного демпфирования упругих колебаний элементов конструкции вращающегося объекта | 1983 |
|
SU1134927A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU798704A1 |
| Устройство для регулирования асинхронного двигателя | 1983 |
|
SU1202006A1 |
Изобретение относится к системам терминального управления упругим объектом, а именно к системам управления движением динамических объектов, т.е. объектов с присоединенными упругими элементами, и может быть использована для стабилизации упругих объектов с минимальным накоплением энергии упругих колебаний. Целью изобретения является увеличение быстродействия системы в режиме стабилизации за счет снижения возмущающего влияния колебаний упругих элементов конструкции, а также повышение точности системы. Система терминального управления упругим объектом содержит объект 1 управления, блок исполнительных органов 2,датчик угла 3, датчик скорости 4, задатчик положения 5, блок сравнения 6, блок 7 формирования линий первключения,блок 8 формирования условий переключения, управляющий автомат 9, первый 10, второй 11 и третий 12 блоки формирования линейного сигнала, блок 13 фор- § мирования управления и блок 14 терми- нального управления. 7 ил.
+ Xot +
(o,5v;;t
( - 0,5 at, sign (x,,) 0,
1
- i ati,
sign (x,, ) 0;
(3)
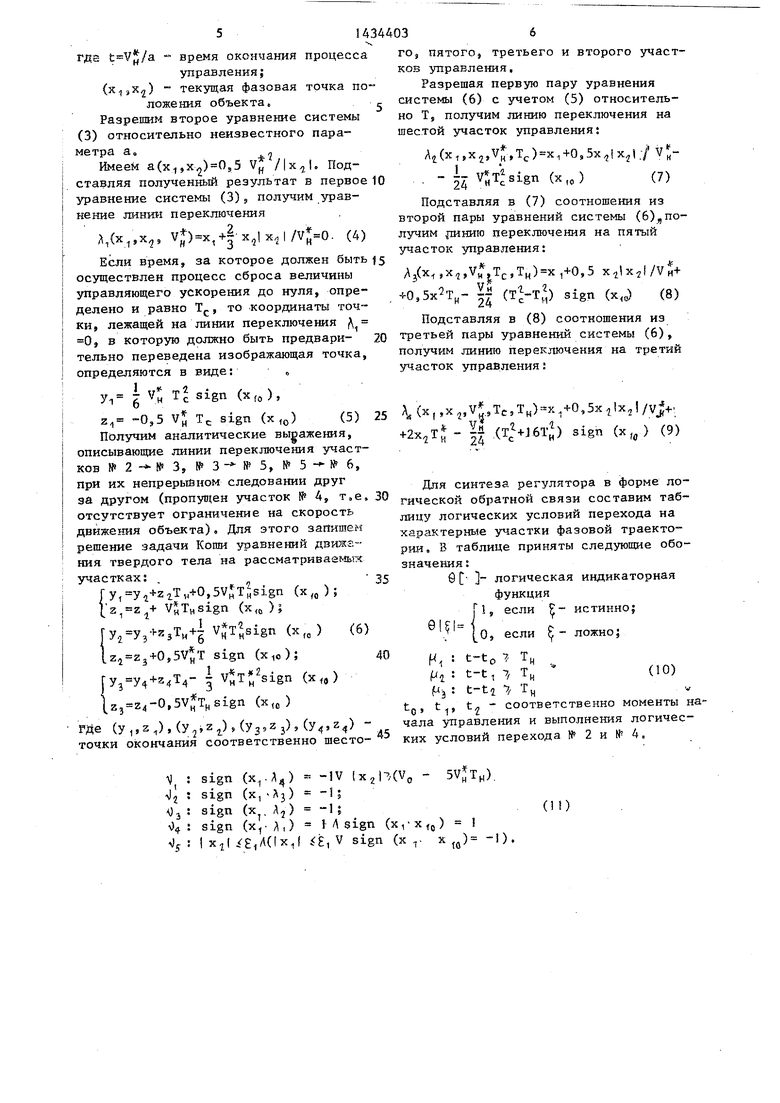
где - время окончания процессаго, пятого, третьего и второго участуправления;ков управления, () текзтщая фазовая точка по- Разрешая первую пару уравнения
ложения объекта,гсистемы (6) с учетом (5) относительРазрешим второе уравнение системыно Т, получим линию переключения на
(3) относительно неизвестного пара-шестой участок управления;
- ,|A,(x,,X2,V.T)x,+0,5x,x,|,-/V);Имеем a(xi,x)0s5 V /|х,К Под- - - . ставляя полученный результат в первое 10 37 н -c S ( ю )
(7)
уравнение системы (3). получим уран- „/ч
Подставляя в (7) соотношения из
нение линии переключения .„„ ,,.
второй пары уравнении системы (6),поДДх, V)x, . (4)лучим шнига переключения на пятый
участок управления: Если время, за которое должен быть 5
осуществлен процесс сброса величиныAjC ,X,,VH ,Tj-,Тц)х ,+0,5 x lx-jl/VH
управляющего ускорения до нуля, опре- о, Ь ( sign (х,, (8) делено и равно Т, то координаты точ- м ,гг с ц о и- ки, лежащей на линии переключения Д Подставляя в (8) соотношения из
0, в которую должно быть предвари- 20Третьей пары уравнений системы (6),
тельно переведена изображающая точка,получим линию переключения на третий
определяются в виде: участок управления;
У1 g VH Т sign (Xfo ),
-0,5 VIJ TC sign (х,о) (5) 25 A,(x,,X2,yJ.,Tc,T,)-x.-0,,,/v
Л 24
t n
Получим аналитические вы§ажения, - т .() sign (х , ) (9)
описывающие линии переключения участков № 2 - № 3, № 3 - № 5, № 5 - № 6,
при их непрерыйном следовании друг д синтеза регулятора в форме лоза другом (пропущен участок № 4, т.е. 30гической обратной связи составим таб- отсутствует ограничение на скорость логических условий перехода на движения объекта). Для этого запишемхарактерные участки фазовой траекто- решение задачи Коши уравнений движг- g таблице приняты следующие обо- ния твердого тела на рассматриваешкзначения:
участках; , 5 б логическая индикаторная
ry,,.+0,5VHT;;sign (,), функция
fa, VulHsign (х, );Г5 если „ истинно;
ГУ,.4 (,0 ) (6) 615 о, если - ложно;
lz4 Z3- -055V T sign (); 40 . t-t, Т
ГУ V T 2sign (х,,)Р : t-t, 7, Т, (10)
(
(, sign (x,j ) соответственно моменты наГДе (у,,2,),()ЛУз.2 j), (,z) -чала управления и выполнения логичесточки окончания соответственно шее условий перехода № 2 и № 4.
А) : sign (х.;) - -IV Ix l- /CVo - ).
л : sign (х, АЗ s
3 sign (х. Aj) -1;( О
N) : sign (х,.А,) М sign (хгх,) 1
l : I х.,( .,A(IXi( , V sign (х . х ,д) -1).
(7)
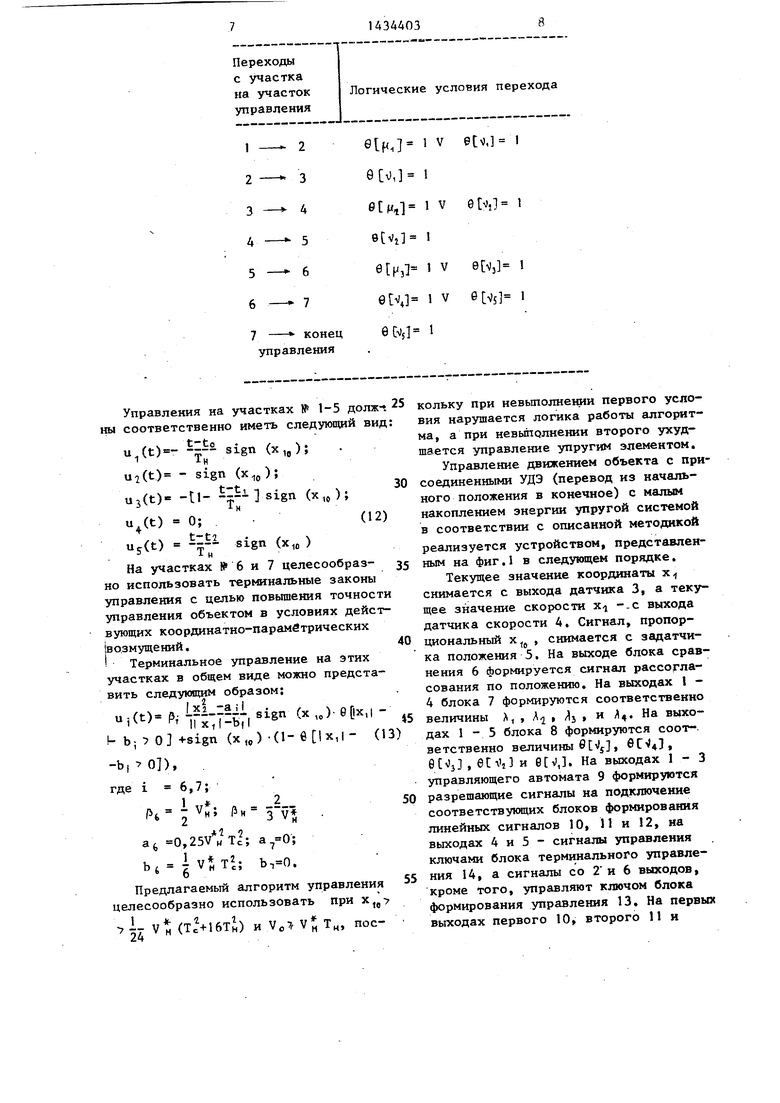
Управления на участках № 1-5 долж-. ны соответственно иметь следующий вид
u(t)- sign (х,,);
ui(t) - sign ();
U3(t) tl- (х„);
u (t) 0; -(12)
t-12
Uj(t) -|- sign (x,o )
Ha участках № 6 и 7 целесообразно использовать терминальные законы управления с целью повьппения точности управления объектом в условиях действующих координатно-парамйтрических возмущений,
Терминальное управление на этих участках в общем виде можно представить следукицим образом;
Ui(t) р -)- ,| -
- Ь; 0 +sign (х„) -d-ettx,- (13 ), . где i 6,7;
Pi
р„
} V J н
а(, 0, bt .
Предлагаемьй алгоритм управления 55
1в
целесообразно использовать при х -7 V (Тс+16Тн) и Vo V Тц, пос-. 25 д:
°
)
и
3)
35
40
50
55
кольку при невьшолнегаи первого условия нарушается логика работы алгоритма, а при невьптолнении второго ухудшается управление упругим элементом.
Управление движением объекта с присоединенными УДЭ (перевод из начального положения в конечное) с малым накоплением энергии упругой системой в соответствии с описанной методикой
реализуется устройством, представленным на фиг,1 в следующем порядке, Текущее значение координаты х снимается с выхода датчика 3, а текущее значение скорости х -.с выхода датчика скорости 4, Сигнал, пропорциональный к , снимается с задатчи- ка положения 5. На выходе блока сравнения 6 формируется сигнал рассогласования по положению. На выходах 1 - 4 блока 7 формируются соответственно величины Л, , А , ,1j , и Л. На выходах 1 - 5 блока 8 формируются соот-, ветственно величины , , ее Vj и ,. На выходах 1 - 3 управляющего автомата 9 формируются разрешающие сигналы на подключение соответствующих блоков формирования линейных сигналов 10, П и 2, на выходах 4 и 5 - сигналы управления ключами блока терминального управления 14, а сигналы со 2 и 6 выходов, кроме того, управляют ключом блока формирования управления 13, На первых выходах первого 10, второго 11 и
личинам
1г
а на
Третьего 12 блоков формирования линейных сигналов формирутатся соответственно сигналы, пропорциональные веt.:t t-ti
т
,1 . «
вторых выходах - сигналы завершения формирования линейных сигналов На выходе блока терминального управления I4 формируется либо значение управления U, , либо u-y (в зависимости от сигналов, снимаемых с четвертого и пятог о выходов управляющего автомата) На выходах блока формирования гправ- ления 13 формируются сигналы управ- ления разной полярности (с выхода 1 снимается только отрицательньй сигнал с выхода 2 - положительный).
Устройство работает следующим образом,
При необходимости перевести объект с присоединёнными УДЭ из начального положения в. конечное (из состояния покоя в состояние покоя) подается разрешающий сигнал на управляющий вход системы. Этот сигнал поступает на шестой вход управляющего автомата
9и переводит систему в режим функ- тонирования. Сигналы с выходов датчика скорости 4, блока сравнения 6 и задатчика положения 5 подаются соответственно на первый второй к третий входы блока 7 и блока терминала- ного управления lAj а также на пятьтйд шестой и седьмой входы блока 8, На выходах блока 7 формируются сигналы,, пропорциональные .значениям Д ( , Л. э
АЗ и Д согласно формулам , (4)j (7), (8) и (9) и поступают на первые четыре входа блока 3. Блок 8 реализует текущие значения логических уело™ вяй перехода. На его выходах формируются сигналы 9 С )sis Cfj. , и 0 r-Jj (см. (11) и поступают на первые пять входов, управляющего ав томата 9. Управляющий автомат 9 осуществляет последовательное включение блоков формирования линейньк сигналов
10- 12 и блока терминального управления 14 в зависимости от выполнения логических условий переходов(таблица
и фиг,7 ). На выходе блока терминального управления формируются последо
Блок 8 формирования условий перевательно сигнахш, пропорциональные
, Ufe и U, согласно формуле (13). Сигна- ™« работает следуюсичм образом лы соответственно с первых выходов первого 10, второго 11 и третьего 12 блоков формирования ,пинейных сигналов, с выхода блока терминального упСигналы, пропорциональные х, , Д, Д,2 S 1 4 поступают соответствен но на первые входы множителей 39, 3 37s 36 и 35, на вторь е входы которых
0
5
0
5
о
0
5
равнения 4, со второго и шестого выходов упраБ,пяющего автомата 9, а также с выхода задатчика положения 5 поступают- на входы блока формирования управления IB, который реализует управления U, -.U5- согласно формулам (12) и в зависимости от знака сигнала подключает свои соответствующие выходы ко входам блока исполнительных органов 2 t,
Блок 7 фор:-шрования линий переключения работает следующим образом.
Сигнал;, пропорциокалькый Xjs поступает на входы формирователя модуля 19, уси,пителей 23 и 24 и на второй ВХОД множителя 20, на первый вход которого подается сигнал с выхода формирователя модуля5 пропорциональный lx,2l. Сигнал5 пропорциональный х , поступает на первые входы сумматоров 29, 30J 31 и 32 Сигнал, пропорциональный Xffl 5 поступает на вход релейного элемента 25, на выходе которого формируется сигнал, пропорциональный sign х ,д ) J и подается на входы делителей напряжения 26 - 28
Сигнал с выхода множителя 20, пропорциональный x.|x,l, подается на входы усрихителей 21 и 22, на вькодах которых формируются соответственно сигналы, пропорциональные 2/3 )/ /V и 0,5 ., При этом сигнал с выхода усилителя 2I поступает на второй вход сумматора 29, а сигнал с выхода усилителя 22 - на третьи входы сумматоров 30 - 32, На выходах делителей 26 28 формируются соответственно сигналы, пропорциональные величинам 2 V (х,с), 24 нСТс тЬ sign (х,) и - V(T4l6 0
Н - 10
sign (x,,j), подаются на инверсные входы сумматоров 30 - 32, На выходах усилителей 23 и 24 формируются соответственно сигналы, пропорциональные
величинам 0,5 Х7.Тц и 2 и подаются на четвертые входы сумматоров 31 и 32 На выходах сумматоров 29 - 32 формируются соответственно сигналы, пропорциональные А, , Д-, , Д,, и Л4 (формулы (4), (7) - (9)),
Блок 8 формирования условий пере ™« работает следуюсичм образом
Сигналы, пропорциональные х, , Д, , Д,2 S 1 4 поступают соответственно на первые входы множителей 39, 38, 37s 36 и 35, на вторь е входы которых
подается сигнал, пропорциональный х,„ На выходах множителей 35-39 формируются соответственно сигналы, пропорциональные величинам , х /Ij, X -Д , X , А, и , и подаются на входы релейных элементов 43-47. Сигнал, пропорциональный х, поступает на вход формирователя модуля 33, на выходе которого формируется сигнал, пропорциональный |Xj|, и подается на входы индикаторов уровня 40 и 41. Кроме того, сигнал, пропорциональный , поступает на вход формирователя модуля 34, на выходе которого формируется сигнал, пропорциональный |x и подается на вход индикатора уровня 42. На выходе индикатора уровня 40 формируется единичный сигнал при условии выполнения соотношения ,,
0,5Vn TH и поступает на вход элемента ИЛИ 48 (в противном случае сигнал на выходе индикатора уровня 40 отсутствует) . Аналогичным образом действуют и индикаторы уровня 41 и 42. На их выходах единичные сигналы появляются соответственно при выполнении условий 1x11 и lx,(7f,. Сигналы с выходов индикаторов уровня 41 и 42 поступают соответственно на инверс- нь1й вход элемента И 52 и на вход элемента И-НЕ 53. На выходах релейных элементов 43-47 формируются единичные сигналы соответственно при выполнении условий х,7/ О, x,Aj т О,
X, О, X, Д 7, О и X , Х,,7,0.
При невыполнении этих условий сигналы отсутствуют. Сигналы с выходов релейных элементов 43-47 подаются соответственно на инверсный вход элемента ИЛИ 48, входы инверторов 49 и 50 и на входы элементов И 51 и И- НЕ 53. Кроме того, сигнал с выхода релейного элемента 47 подается на вход элемента И 51, ас выхода элемента И-НЕ 53 - на вход элемента И 51 На выходах элемента ИЛИ-48, инверторов 49 и 50, элементов И 51 и 52 формируются соответственно сигналы
, , , б 53 формулы (11)).
Блок 10 формирования линейного сигнала состоит из генератора линейного сигнала 15, инвертора 16, индикатора уровня 17 и настраиваемого делителя напряжения 18. Единичный сигнал, поступаюп1ий с соответствующего выхода управляюп его автомата 9, подается на первый вход генератора линей
здчоз i :
ког о напря, и запускает его. При этом на выходе инвертора 16 сигнал отсутствует. На выходе генератора линейг ного напряжения 13 формируется сигнал, Пропорциональный t (t - время, прошедшее с момента включения генератора 15), и поступает на входы индикатора уровня 17 и делителя напряжения 18,
10 на выходе которого формируется сигнал, пропорциональный t/T. На выходе индикатора уровня 18 формируется единичный сигнал при выполнении условия 17/Т ц (в противном случае сигнал от15 сутствует) и поступает на соответст, вующий вход управляющего автомата 9. При исчезновении сигнала на первом входе генератора 15 на выходе инвертора 16 формируется единичный сигнал,
20 который подается на второй вход генератора 15 и отключает его. После этого на выходе делителя напряжения 18 сигнал также исчезает. При отсутствии сигнала на .первом входе генератора
25 15 он находится в выключенном состоянии и на выходе делителя напряжения 18 сигнал также отсутствует.
Управляющий автомат 9 состоит из десяти элементов -ШИ 54-63 и семи
30 триггеров 64-70, Сигнал с управляющего входа системы (девятый вход управляющего автомата) открьшает триггер 64 и, одновременно, устанавливает триггеры 65-70 в нулевое состоя35 ние. Сигнал с триггера поступает на первый выход управляющего автомата и одновременно подготавливает к рабо- . те триггеры 65 и 66 (триггеры 65-70 могут быть открыты только при нали40 чии единичного сигнала на первых входах) . При появлении единичного сигнала на шестом входе управляющего автомата триггер 65 открывается, а Триггер 64 запирается. Сигнал с вы45 хода триггера 65 подается на шестой выход управляющего автомата и одновременно подготавливает триггер 66 к работе. При появлении сигнала на пятом входе автомата триггер 66 открыCQ вается, а триггер 65 запирается. В случае появления сигнала на пятом входе автомата раньше, чем на шестом, триггер 65 остается в нулевом состоянии и открывается сразу триггер 66.
55 Сигнал с выхода триггера 66 поступает на второй выход автомата и одновременно подготавливает к работе триггеры 67 и 68. При появлении сигнала на седьмом входе управляющего автома13143
та триггер 67 открьшается и подготавливает к работе триггер 68, а триггер 66 запирается При появлении сигнала на четвертом входе автомата триггер 68 открьшается, а триггер 67 запирается. В случае появлении сигнала . на четвертом входе автомата раньше, чем на седьмом, триггер 67 оста
ется в нулевом СОСТОЯНИИ} а открывается сразу триггер 68 Сигнал с выхода триггера 68 поступает на третий выход автомата и одновременно подготавливает к работе Триггер 69. При появлении сигнала на восьмом либо на третьем входах автомата открьшается :триггер 69, а триггер 68 запирается,, Сигнал с выхода триггера 69 подается на пятый выход автомата и одновременно подготавливает к работе триг- гер 70, При появлении сигнала на втором входе автомата открьшается триггер 70 и сигнал с его выхода поступает на четвертый выход автоматаа а триггер 69 запирается. При появлении сигнала на первом входе авт§1мата триггер 70 запирается,.а автомат отключается. В случае появления сигнала на первом входе автомата раньше, чем на втором,- триггер 70 остается в ну- левом состоянии, а триггер 69 запирается и отключает управляющий автомат.
Блок 1А терминального управлел-шя работает след-ующим образом.
Сигнал,, пропорциональный х,, поступает на вход формирователя модуля 84, на выходе которого формируется сигнал, пропорциональный |х/|, и подается на первый вход сумматора 88, Сигнал, пропорциональный х, поступает на входы множителя 82, на выходе которого формируется сигнал, пропорциональный х и подается на первый вход сумматора 87« Сигнал, про
порциональный х,д , поступает на вход д порциональный величине релейного элемента 98 на выходе которого формируется сигнал, пропорциональный sign (х 5) а и подается на вход множителя 83, а также через ключ 94 - на выход блока терминального У SQ равления. При Появлении единичного сигнала на пятом входе блока терминального управления (при этом на четвертом входе сигнал отсутствует, а
При исчезновении сигнала на четве том входе блока терминального упр ния ключ 91 закрывается, блок отк чается ,
Блок 3 формироваьгая управлени работает следующим образом„
Сигнаит, пропорциональный х,, , ступает на вход релейного элемент 71, на выходе которого формируетс сигнал, пропорциональный sign (х и подается на первые входы множит лей 74 - 76, а также через ключ 7 на пяго1Й (инверсный) вход с ммато 77. Сигналы с первого второго и
клкч 91 закрыт) открьюаются ключи 89, 90 и 92, Сигнал со второго выхода источника постоянного напряжения 101 пропорциональный Ь (см (13)), через ключ 90 подается на второй вход
сумматора 88s сигнал со второго вы- хода пропорциональный - а(см,(13)), через ключ 89 поступает на второй вход сумматора 87, Сигнал с выхода сз мматора 87, пропорциональный х -а, поступает на формирователь модуля 86.
на выходе которого формируется сигнал, пропорциональный |х - , и
подается на вход усилителя 96. Сигнал с выхода усилителя 96, пропорциональный величине /ij х - а , через ключ 92 поступает на первый вход делителя 99, Сигнал с выхода сумматора 88,
пропорциональный fx-, Ъ , подается на вход релейного элемента 97, а также на вход формирователя модуля 85, на выходе которого формируется сигнал, пропорциональный llxj- , и поступает на второй вход делителя 99
На выходе релейнсп о элемента 97 формируется единичный сигнал при выполнении условия х,| b ( 7 О и поступает на управляющий вход ключа 93, а также чарез инвертор 100 - на управляющий вход ключа 94, (При х, - Ь, 7 О ключ 93 открыт, а ключ 94 закрыт; при х,|- Ь 0 наоборот). Сигнал с выхода делителя 99, пропорциональный
х - аб величине j,. подается на
11 -1 I (,1
вход множителя 83, на выходе которого формируется сигнал, пропорциональный /Ь - - ;р:-ь -| sign (х.), и через
ключ 93 поступает на выход блока терминального управления. При появлении единичного сигнала на четвертом входе блока терминального управления сигнал на пятом входе исчезает, открьшается ключ 91, а ключи 89 90 и 92 за- крьшаются, В этом случае на выходе делителя 99 формируется сигнал, пропорциональный величине
При исчезновении сигнала на четвертом входе блока терминального управлния ключ 91 закрывается, блок отключается ,
Блок 3 формироваьгая управления работает следующим образом„
Сигнаит, пропорциональный х,, , поступает на вход релейного элемента 71, на выходе которого формируется сигнал, пропорциональный sign (х,), и подается на первые входы множителей 74 - 76, а также через ключ 79 - на пяго1Й (инверсный) вход с мматора 77. Сигналы с первого второго и
третьего входов блока формирования управления поступают соответственно на вторые входы множителей 74 - 76, В зависимости от этих сигналов на выходах множителей 74-76 сигналы либо отсутствуют, либо формируются сигналы, пропорциональные соответственно беличинам ----- sign (х ,g ) ,
t-ti . . . t-t-J
тТ, о) - sign (х,,).
Н h
Сигналы с пятого и шестого входов блока формирования управления поступают на входы элемента ROH 73, сиГ- нал с выхода которого управляет ключом 79. Сигналы соответственно с выходов множителей 74-76 и с четвертого входа блока формирования управления поступают ка второй (инверс- ный), третий, четвертый и первый входы сумматора 77, на выходе котораго поочередно формируются управляющие сигналы согласно формулам (12)5(13). Ключи 80 и 81, управляемые релейный элементом 72, в зависимости от знака сигнала подключают выход сумматора 77 к соответствующим выходам блока формирования управления.
Предлагаемая система позволяет на порядок и более снизить уровень энергии, накопленной упругой системой к концу этапа переориентации по сравнению с режимом разворота, использующим прототип, реализующий ал- горитм релейного управления, и соответственно сократить длительность переходных процессов стабилизации на 25-50% при относительном увеличении времени программного разворота не более чем на 3%. В этом случае общая длительность углового маневра (разворот + стабилизация) сокращается не менее чем на 10-25%. Кроме того, как минимум в два раза уменьша- ется максимальная амплитуда колебани присоединенного УДЭ, ограниченная амплитуда колебаний присоединенного УДЭ, ограниченная величиной статических деформаций:
hsi q. , j rr7r,
и тем самым понижается вероятность возникновения недопустимо больших по величине деформаций, приводящих к вы ходу УДЭ из строя.
Требуемая точность управления обеспечивается за счет использования теминальных законов при приведении изоражающей точки в качало координат фазовой плоскости. Повышение, точности по Сравнению с прототипом обусловлено тем, что требуемое качество управления с использованием предлагаемого устройства обеспечивается независимо от знака действующего ограниченного по величине возмущения.
Формула изо-бретения
подключен к первому входу блока сравнения, к второму входу которого подключен выход 3адатчика положения и третий вход блока формирования линий переключения, выход блока сравнения соединен с вторым входом блока формирования .линий переключения, а также блок формирования условий переключения, первые четыре входа которого соединены с соответствующими выходами блока формирования линий переключения отличающаяся тем, что, с целью увеличения быстродейс.твия системы в режиме стабилизации за счет снижения уровня возмущающего влияния колебаний упругих элементов конструкции, а также повьппения точности системы, она дополнительно снабжена управ- ляюпщм автоматом, тремя блоками фсзр- мирования линейных сигналов и блоком терминального управления, при этом выходы датчика скорости, блока сравнения и задатчика положения соединены соответственно с пятым, шестым и седьмым входами блока формирования условий переключения и первым, вторым и третьим входами блока терминального управления, с первого по пятый выходы блока формирования условий переключения соединень соответственно с первого по пятый входами управляющего автомата, а шестой, седьмой и восьмой входы управляющего автомата связаны соответственно с первыми выходами первого, второго и третьего блоков
1 шровання линейиь.гх сигналов., первый второй и третий Еыходы втравляющего автомата соединены соответственно € входами первого второго и третьего блоков формиро1зания линейньпс сигнало а четвертый и пятый выходы управляю- -1щего автомата соединень; соответственно с четвертым и пятым входами блока терминального управления, первыйg второй и третий входы блока формирования з правления подключены соответсвенно к, вторым выходам nepBorOs второго и. третьего блоков формирования линейного сигнала, четвертый вход блока формирования управления соединен р выходом блока терминального уп ра.влени.я, пятый и шестой входы- соот- ветственно с вторым и шестым выхода- t M управляющего автомата, седьмой . вход - с выходом задатчика положения, 2 Система терминального управления попо1, отличающаяся тем, что блок формирования линейного сигнала содержит генератор линейного напряжения, инвертор,, нacтpaивae -Iый индикатор уровня и настраиваемый де- литель напряжения;, при этом вход бло Kia формирования линейного сигнала со единен с первь№1 и через инвертор с вторым входами генератора линейного напряжения, выход которого через настраиваемый индикатор уровня соеди
не-н с первьгм выходом блока формирова-:j2 мент ИЛИ, первый и второй инверторы, Ю1Я линейного сигналаg а через наст- первый и второй элементы И, элемент раиваемый делитель напряжения - с И-НЕу при этом первый, второй, ттзе- вторым выходом блока формирования ли- тий, четвертый и седьмой входы блока
формирования условий переключения соединены соответственно с первыми входами четвертого, третьего, второго,
нейного сигнала,
3t Система терминального управления по П.1, отличающаяся тег-г, что блок формироваь-шя линий переключения содержит формирователь модуля сигнала, множитель, первый вто40
первого и пятого множителей, шестой вход - с вторыми входами с первого по питый множителей и входом второго форройс,-третий и четвертьй настраиваемые д мирователя модуля сигнала, а пятый усилители напряженияэ релейный эле- мента первый, второй и третий настраиваемые делители напряжения, а также первый, второй, третий и четвертьй сумматоры, при этом первый вход бло- ка формирования линий переключения соединен с первым входом и через формирователь модуля сигн.ала с вторыми входами множителя, с входом третьего и ВХОДОМ четвертого 5 страиваемых .- усилителей напряжения5 второй вход блока формирования линий переключения соединен с первыми входами первого, второгоJ третьего и четвертого суг-мавход - с входом первого формировате модуля сигнала, выход первого форми вателя модуля сигнала связан с входами первого и второго индикаторов Vpoвня, а вход третьего индикатора уровня связан с выходом второго фор аирователя модуля сигнала, выход пе вого, второго, третьего, четвертого пятого множителей соединены соответ ственно с входа первого, второго, третьего, четвертого и пятого релей ных элементов, выход первого индика тора уровня подключен к первому вхо ду элемента ИЛИ, к второму входу ко
8
торовs третий вход блока формировании линий пехзеклтчения через релей- Н15Ш элемент соединен с входами первого, второго и третьего настраиваемых делителей напряжения, выходы которых соединены с вторыми инвертирующими входами второго, третьего и четвертого сумматоровэ выход множителя соединен с входами первого и второго настраиваемых усилителей напряжения, выход первого настраиваемого усилителя напряжения подключен к второму входу первого сумматораj а выход втор ого настраиваемого усилителя напряжения подключен к третьим входам второго, третьего и четвертого с мматоров, выходы третьего и четвертого настраиваемых усилителей напряжения подключены соответственно к четвертым входам третьего и четвертого сумматоров, выходы первого, второго, третьего и четвертого сумматоров соединены соответственно с первым, вто- рым, третьим и четвертьп-1 выходами блока формирования линий переключения,
4, Система терминального управления ПОП.1, отличающаяся тем, что блок форни.рования условий переключения содержит первый и второй формирователи модуля сигналаг с первого по пятый множители, первый, второй, и третий инцикаторы уровня,с пер ,чого по пятый релейные элементы,, элепервого и пятого множителей, шестой вход - с вторыми входами с первого по питый множителей и входом второго формирователя модуля сигнала, а пятый
вход - с входом первого формирователя модуля сигнала, выход первого формирователя модуля сигнала связан с входами первого и второго индикаторов Vpoвня, а вход третьего индикатора уровня связан с выходом второго фор- аирователя модуля сигнала, выход первого, второго, третьего, четвертого и пятого множителей соединены соответственно с входа первого, второго, третьего, четвертого и пятого релейных элементов, выход первого индикатора уровня подключен к первому входу элемента ИЛИ, к второму входу которого подключен выход первого релейного элемента, выходы второго и третьего релейных элементов соединены соответственно с входами первого и второго инверторов, выход четвертого релейного элемента подключен к первому входу первого элемента И, выход пятого релейного элемента подключен к второму входу первого элемента И и первому входу элемента И-НЕ, к второму входу которого подключен выход третьего индикатора уровня, выход элемента И-НЕ гоединен с первым вхо- дом второго элемента И, второй вход которого связан с выходом второго индикатора уровня, выход второго элемента И соединен с первым выходом блока формирования условий переключения, выход первого элемента И - с вто-20 триггера, пятый выход - с Выходом
рым выходом, выход второго инвертора - с третьим выходом, выход первого инвертора - с четвертым выходом и выход элемента ИЛИ - с пятым выходом
блока формирования условий переключе- 25 вятого элемента ИЛИ, выход четвертого триггера подключен к второму вхо ду десятого элемента ИЛИ,
ния содержит первый и второй релейные элементы, элемент ИЛИ, первый, второй и третий множители, сумматор, инвертор, первый, второй и третий. J5 ключи, при этом первый, второй и третий входы блока формирования управления связаны с первыми входами первого второго и третьего множителей, четвертый вход подключен к первому входу сумматора, пятый и шестой входы - к первому и второму входам элемента ИЛИ, седьмой вход блока формирования управления соединен с входом первого релейного элемента, выход которого
шестой вход - с первым входом второ- д связан с вторыми входами первого, га триггера и вторым входом первого второго и третьего множителей и перг- элемента ИЛИ, седьмой вход - с вторы- вым входом первого ключа, второй ми входами третьего элемента ИЛИ и первым входом четвертого триггера,
восьмой вход - с вторыми входами ПЯ- JQ
того и шестого элементов ИЛИ, а девятый вход управляющего автомата соединен с первым входом первого триггера, вторыми входами второго, четвертого и восьмого элементов ИЛИ, а также 55 третьими входами третьего, пятого и седьмого элементов ИЛИ, выходы с первого по шестой и восьмого элементов ИЛИ подключены соответственно к втовход первого ключа соединен с выходом элемента ИЛИ, выходы первого, вто рого и третьего множителей, а также выход первого ключа подключены соответственно к второму, третьему, четвертому и пятому входу сумматора, выход которого связан с входом второго релейного элемента и первыми входами второго и третьего ключей, выход второго релейного элемента связан с вторьм входом второго ключа и через инвертор с вторым входом
рым входам с первого по седьмой триггеров, выход седьмого элемента ИЛИ связан с третьим входом шестого триггера, выход девятого элемента ИЛИ подключен к третьему входу третьего триггера, а выход десятого элемента ИЛИ подключен к третьему входу пятого триггера, первый выход управ0 ляющего автомата соединен с выходом первого триггера, третьим входом второго триггера и первым входом де-. вятого элемента ИЛИ, второй выход - с выходом третьего триггера, треть5 им входом четвертого триггера и первым входом десятого элемента ЙЖ, третий выход - с выходом пятого триггера и первым входом шестого триггера, четвертый выход - с выходом седьмого
шестого триггера и третьим входом ,седьмого триггера, шестой выход управляющего автомата связан с выходом второго триггера и вторым входом де0
ния содержит первый и второй релейные элементы, элемент ИЛИ, первый, второй и третий множители, сумматор, инвертор, первый, второй и третий. 5 ключи, при этом первый, второй и третий входы блока формирования управления связаны с первыми входами первого, второго и третьего множителей, четвертый вход подключен к первому входу сумматора, пятый и шестой входы - к первому и второму входам элемента ИЛИ, седьмой вход блока формирования управления соединен с входом первого релейного элемента, выход которого
связан с вторыми входами первого, второго и третьего множителей и перг- вым входом первого ключа, второй
вход первого ключа соединен с выходом элемента ИЛИ, выходы первого, втрого и третьего множителей, а также выход первого ключа подключены соответственно к второму, третьему, четвертому и пятому входу сумматора, выход которого связан с входом второго релейного элемента и первыми входами второго и третьего ключей, выход второго релейного элемента связан с вторьм входом второго ключа и через инвертор с вторым входом
третьего ключа, выходы второго и третьего ключей соединены соответственно с первым и вторым выходами блока формирования управления,
7, Система терминального управления .по п., 1, отличающаяся тем, что блок терминального управления содержит первый и второй множители, первый, второй и третий формиро- ватели модуля сигнала первый и второй сумматоры, с первого по шестой ключНз, первый и второй усилители, первый и второй релейные элементь:, делитель, инвертор и источник посто- янноГо напряжения, при этом первый вход блока терминального упрЙления подключен к первому и второму входам первого множителя, второй вход - к входу первого формирователя модуля сигнала, третий вход - к входу второго релейного элемента, четвертый вход - к первому входу третьего ключа, пятый вход блока терминального управления подключен к первым входам первого, второго и четвертого ключей, выход первого множителя сЬединен с первым входом первого сумматора, второй вход которого подключен к выходу riepBoro ключа, второй вход первого ключа связан с первым выходом источни
ка постоянного напряжения, второй выход которого подключен к второму входу второго ключа, выход второго ключа соединен с первым входом второго сумматора, второй вход которого соединен с выходом первого формирователя мо- дуля сигнала, а выход второго сумматора связан с входами второго формирователя модуля сигнала и первого релейного элемента, выход первого сумматора подключен к входам первого и второго усилителей, выходы которых соединены соответственно с вторыми входами третьего и четвертой ключей, выходы третьего и четвертого ключей соединены с первым входом делителя, к второму входу которого подключен выход второго формирователя модуля сигнала, выход первого релейного элемента соеди- .нен с первым входом пятого ключа и через инвертор с первым входом шестого ключа, выход второго релейного элемента соединен с вторым входом шестого ключа и первым входом второго множителя, второй вход которого подключен к выходу делителя, а выход второго множителя соединен с вторым входом пятого ключа, выходы пятого и шестого ключей подключены к выходу блока терминального управления,
C&i/e.
f3
л.
72
/
«
77
75
«
:5
zzT
J
/
Х Ч /
. ,N / Л
. 7
| Авторское свидетельство СССР № 1124732, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
