1Ч
Изобретение относится к горному делу и может быть использовано в системах управления креплением очистных забоев.
Целью изобретения является повышение надежности управления за счет устранения лолсных срабатываний устройства.
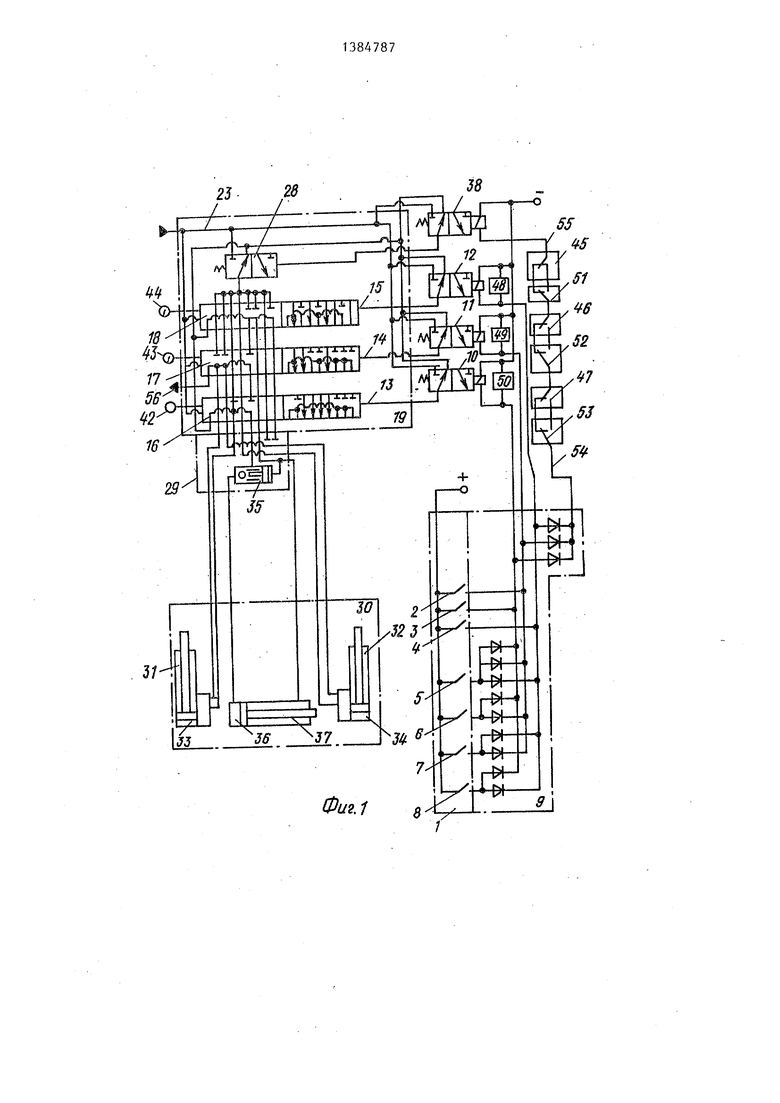
На фиг. 1 приведена принципиальная электрогидравлическая схема устройства; на фиг. 2 - гидрораспределитель, разрез.
Устройство дистанционного управления содержит пульт 1 управления с кнопками 2-8 и шифратором 9, который может быть выполнен, например, в электрическом варианте, диодным. Шифратор 9 электрическими линиями соединен
с электромагнитными приводами (цепя- 20 следовательно цепями 54 и 55 соеди- ми управления) пилотных элементов 10-12, выкоды которых, в свою очередь, соединены каналами 13-15 с полостями управления распределительных
иены с ц епью питания электромагнитно го привода управляющего распределителя 38 и с шифратором 9 пульта управления 1. Коммутационные каналы
выполненными в виде магнитов 39-41, жестко соединенных с распределительными элементами, и герконов (магнито- управляемых элементов) 42-44 (фиг.2) с переключающими контактами 45-47 (фиг. 1) и датчиками входных цепей пилотных элементов 10-12, которые могут быть выполнены в виде электрических реле 48-50 с переключающими контактами 51-53. Реле 48-50 подключены параллельно электромагнитам пилотных элементов 10-12.
Переключающие контакты 45-47 герконов 42-44 (датчиков распределительных элементов) и переключающие конта- кты 51-53 соответствующих датчиков входных цепей пилотных элементов соединены попарно, а указанные пары последовательно цепями 54 и 55 соеди-
иены с ц епью питания электромагнитного привода управляющего распределителя 38 и с шифратором 9 пульта управления 1. Коммутационные каналы
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления стволом гидромонитора | 1980 |
|
SU883452A1 |
| ГИДРОСИСТЕМА ПРОМЫШЛЕННОГО ТРАКТОРА | 1995 |
|
RU2084357C1 |
| ЛИНЕЙНАЯ ЦИКЛИЧЕСКАЯ ПИЛА ПО МЕТАЛЛУ | 2023 |
|
RU2811348C1 |
| Устройство для управления разгрузкой думпкаров | 1979 |
|
SU1058870A1 |
| Устройство для шагового перемещения горной машины | 1979 |
|
SU863879A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794243C1 |
| СПОСОБ ПОВЫШЕНИЯ ЖИВУЧЕСТИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ ЛЕТАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И ЕГО БЛОК КОММУТАЦИИ | 2004 |
|
RU2279995C1 |
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, СТРУЙНЫЙ ДВИГАТЕЛЬ, РАСПРЕДЕЛИТЕЛЬ И БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ | 1995 |
|
RU2093715C1 |
| Манипулятор для очистки железнодорожных полувагонов | 1985 |
|
SU1335492A1 |
| Устройство для управления бурильной установкой горного комбайна | 1980 |
|
SU1104261A1 |
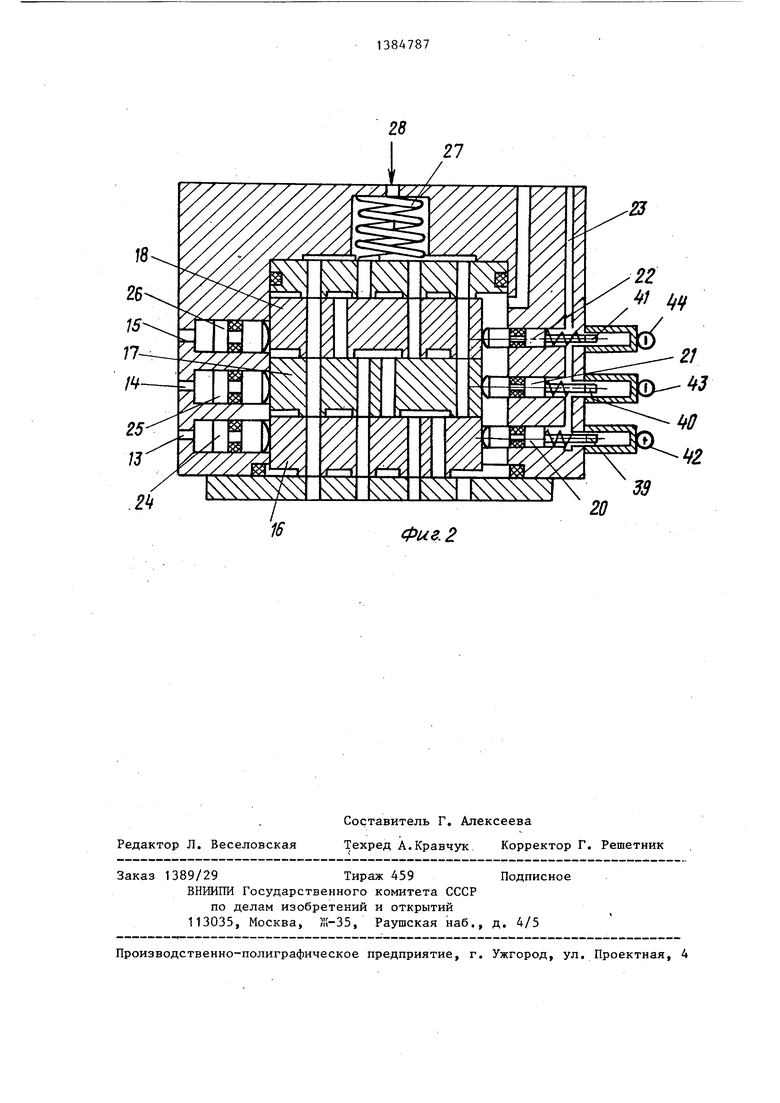
Изобретение относится к горному (делу и м.б. использовано при креплении очистных забоев. Цель - повьппение; надежности управления за счет устранения ложных срабатьшаний устр-ва. Для этого оно снабжено датчиками положения распределительных элементов (РЭ) 16-18, датчиками входных цепей пилотных-элементов (ПЭ) 10-12 и управляющим распределителем (УР) 38 с электромагнитным приводом. Датчики перемещения РЭ 16-18 выполнены в виде магнитоуправляемых контактов 42- 44, постоянные магниты которых расположены в камерах возвратных поршней, а на торцах камер выполнены контакты 42-44. Датчики входных цепей ПЭ 10-12 выполнены в виде электрических реле 48г50. Переключающие контакты 46 и 47 датчиков положения РЭ 16-18 и переключающие контакты 51- 53 реле 48-50 соединены попарно и включены последовательно с цепью питания электромагнитного привода УР 38 череэ пульт 1 управления. Подача питания на УР 38 возможна только в случае, если при отключенном ПЭ 10-12 соответствующий РЭ 16-18 находится в крайнем левом положении, а при включенном РЭ 10-12 - в крайнем правом положении. 2 з.п. ф-лы, 2 ил. (D (Л оо 00 4 00 
элементов 16-18, гидрораспр еделителя 25распределительных элементов 16-18 19. Гидрораспределитель 19 являетсясоединены с линией 56 слива, с по- дешифратором и содержит корпус, вследней связаны также полости пилот- полости которого размещен пакет плос-ных элементов 10-12, впускного клапа35
40
ких золотников распределительных элементов 16-18, контактирующих с воз- ЗО вратными подпружиненными поршнями 20-22, полости управления которых постоянно соединены с напорной линией 23,- и приводными поршнями 24-26, полости управления которых соединены каналами 13-15 с выходами пилотных элементов 10-12. Распределительные элементы 16-18 сжаты пружиной 27.
Коммуникационные каналы распределительных элементов 16-18 соединены с напорной линией 23 через впускной клапан 28, а через коллектор 29 - с исполнительными гидроцилиндрами секции 30 крепи, например с штоковы- ми 31. и 32, поршневыми 33 и 34 полостями гидростоек, и через гидрозамок 35 - с поршневой 36 и штоковой 37 полостями домкрата передвижки.
Коллектор позволяет применять устройство дистанционного управления без изменений практически для любого 0 типа механизированной крепи.
Устройство содержит управляющий распределитель 38 с электромагнитным приводом, соединенный гидравлическими
45
на 28 и управляющего распределителя 3.
Устройство работает следующим образом.
В исходном состоянии кнопки 2-8 пульта 1 управления разомкнуты, электромагнитные приводы пилотных.элеме нтов 10-12, а также управляющего рас пределителя 38 обесточены, каналы 13-15 через полости управления пилот ных элементов и впускного клапана 28 соединены с линией 56 слива. С указанной линией соединены также внутренние полости гидрораспределителя 19.
Для выполнения определенной операции, например для разгрузки стоек, т.е. подачи давления в полости 31 и 32, оператор нажимает кнопку 2, и напряжение подается на датчик 49 входных цепей пилотного элемента 11. В связи с тем, что время срабатывания реле 49 меньше времени срабатыва ния пилотного элемента 11, он перебрасывает свой контакт 52 и разрывает цепь питания электромагнитного
линиями с линией 23 напора и с впуск- привода управляющего распределителя
ньм клапаном 28.
Устройство снабжено также датчиками распределительных элементов.
5
0
О
0
5
на 28 и управляющего распределителя 3.
Устройство работает следующим образом.
В исходном состоянии кнопки 2-8 пульта 1 управления разомкнуты, электромагнитные приводы пилотных.элементов 10-12, а также управляющего распределителя 38 обесточены, каналы 13-15 через полости управления пилотных элементов и впускного клапана 28 соединены с линией 56 слива. С указанной линией соединены также внутренние полости гидрораспределителя 19.
Для выполнения определенной операции, например для разгрузки стоек, т.е. подачи давления в полости 31 и 32, оператор нажимает кнопку 2, и напряжение подается на датчик 49 входных цепей пилотного элемента 11. В связи с тем, что время срабатывания реле 49 меньше времени срабатывания пилотного элемента 11, он перебрасывает свой контакт 52 и разрывает цепь питания электромагнитного
Площадь сечения приводных поршней 24-26 больше площади сечения возвратных поршней 20-22, поэтому распределительный элемент 17 под воздействием давления управляющего поршня 25 перемещается в крайнее правое положение, вместе с ним перемещается и магнит 40. Под воздействием магнитного потока геркон 43 перебрасывает свой контакт 46 и замыкает разорванную цепь, соединяющую электр магнитный привод управляющего распределителя 38 с источником питания через пульт управления.
Управляющий распределитель 38, включаясь, переключает впускной клапан 28, который соединяет линию 23 напора с распределительными элементами 16-18. Давление через впускной клапан 28 поступает по каналам распределительных элементов 16-18, коллектора 29 в штоковые полости 31 и 32 стоек (опускаются стойки секции). Этот процесс продолжается до тех пор пока прижата кнопка 2. Для прерывани операций достаточно отпустить кнопку при этом пилотный распределитель 11 отключается, реле 49 своим контактом 52 разрывает цепь питания электромагнитного привода управляющего распределителя 38, который соединяет полость управления впускным клапаном 28 со сливной линией 56, давление в полости управления впускным клапаном снижается до сливного, впускной клапан возвращается в исходное положение и все коммуникационные каналы гидрораспределителя 19 соединяются со сливом. Под действием возвратного подпружиненного поршня 21 распредели тельньш элемент 17 также возвращается в исходное положение, а вместе с ним магнит 40 отходит от геркона 43, которьй перебрасывает свой контакт в исходное положение. При выполнении других операций нажимают другие кнопки и процесс управления выполняется аналогично описанному.
0
5
0
5
0
5
0
5
Устранение ложных включений в устройстве объясняется тем, что подача питания на управляющий распределитель возможна только в случае, если при отключенном пилотном элементе соответствующий распределительньш элемент находится в крайнем левом положении, а при включенном - в крайнем правом положении.
Формула изобретения
Фи2,1
5S
23
Фие.2
| 1979 |
|
SU826014A1 | |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
