//11. Г2
Г8
00 00
00

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1985 |
|
SU1309243A1 |
| СПОСОБ МУЛЯРА УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ M-ФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 1993 |
|
RU2106054C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ ДВОЙНОГО ПИТАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2076450C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ РЕЖИМОМ РАБОТЫ | 2013 |
|
RU2540319C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ С ФАЗНЫМ РОТОРОМ | 2023 |
|
RU2821722C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |
Изобретение относится к электротехнике. Целью изобретения является увеличение диапазона регулирования частоты вращения и повышение энергетических показателей. Указанная цель достигается тем, что в регулируемом электроприводе для низкочастотного технологического оборудования обмотка ротора дугостаторного электродвигателя выполнена многофазной и составлена -из секций 6, 7, 8,9,равномерно распределенных по окружности ротора . Концы секций соединены перемычками 18, 19, 20, 21 из материала с низким удельным сопротивлением и перемычками 22 из материала с высоким удельным сопротивлением. Для обеспечения регулирования частоты вращения выводы обмотки дугостатора подключены к сети через ключи,управляемые блоком управления. Для возврата энергии в сеть на пониженных скоростях использованы выпрямитель и инвертор. 8 ил. (Q (Л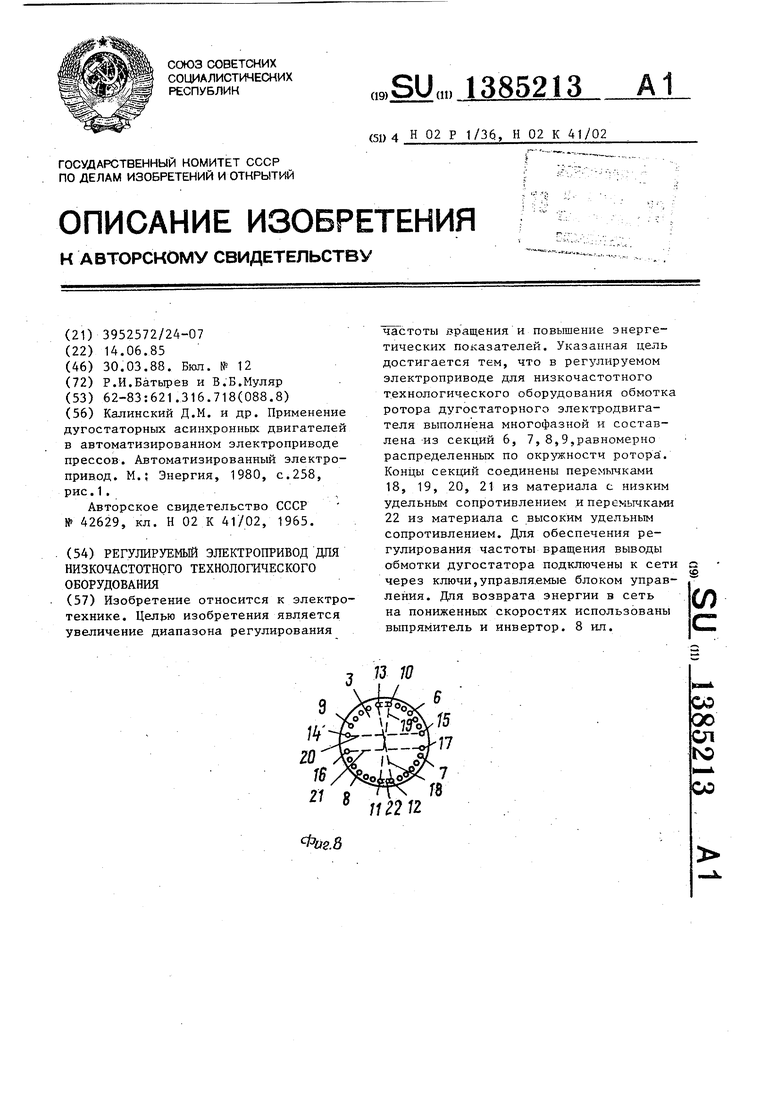
Ф«г.Й
Изобретение относится к электроприводу, в частности к дугостаторному электроприводу, и может быть использовано в кйчестве безредукторного электропривода для ряяличного технологического оборудования, т.е. низкоскоростного и тихоходного химического оборудования.
Цель изобретения - увеличение диа- пазона регулирования частоты вращения и повышение энергетических показателей.
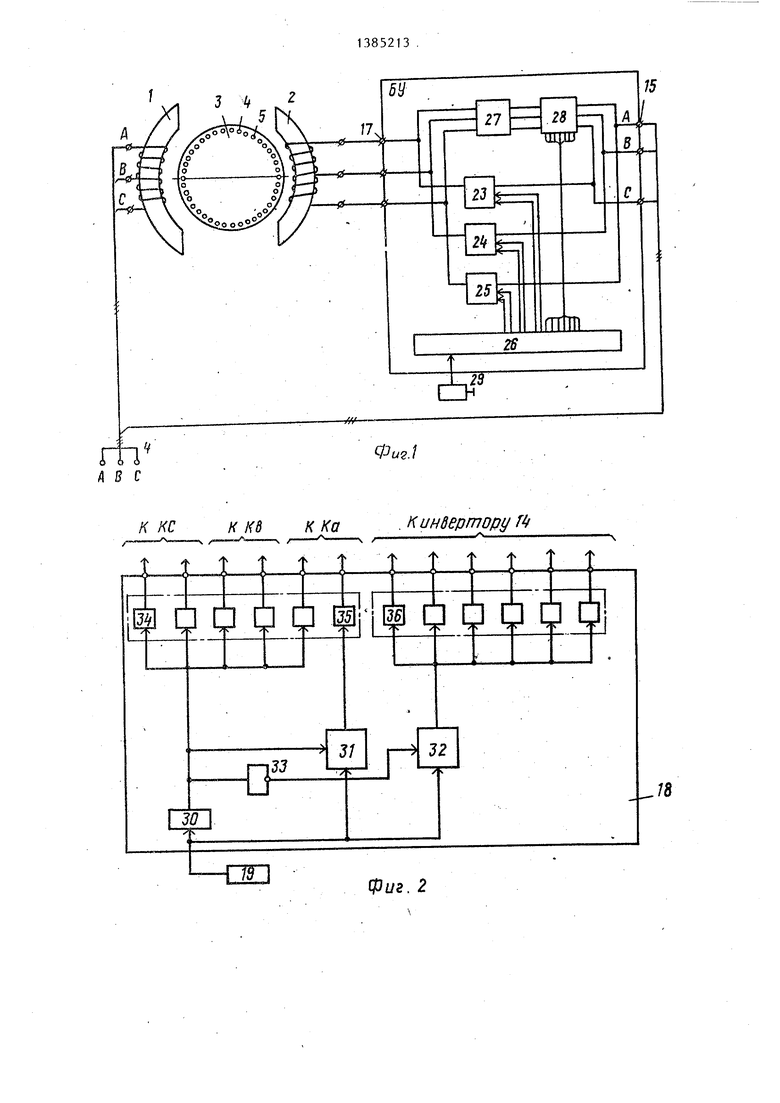
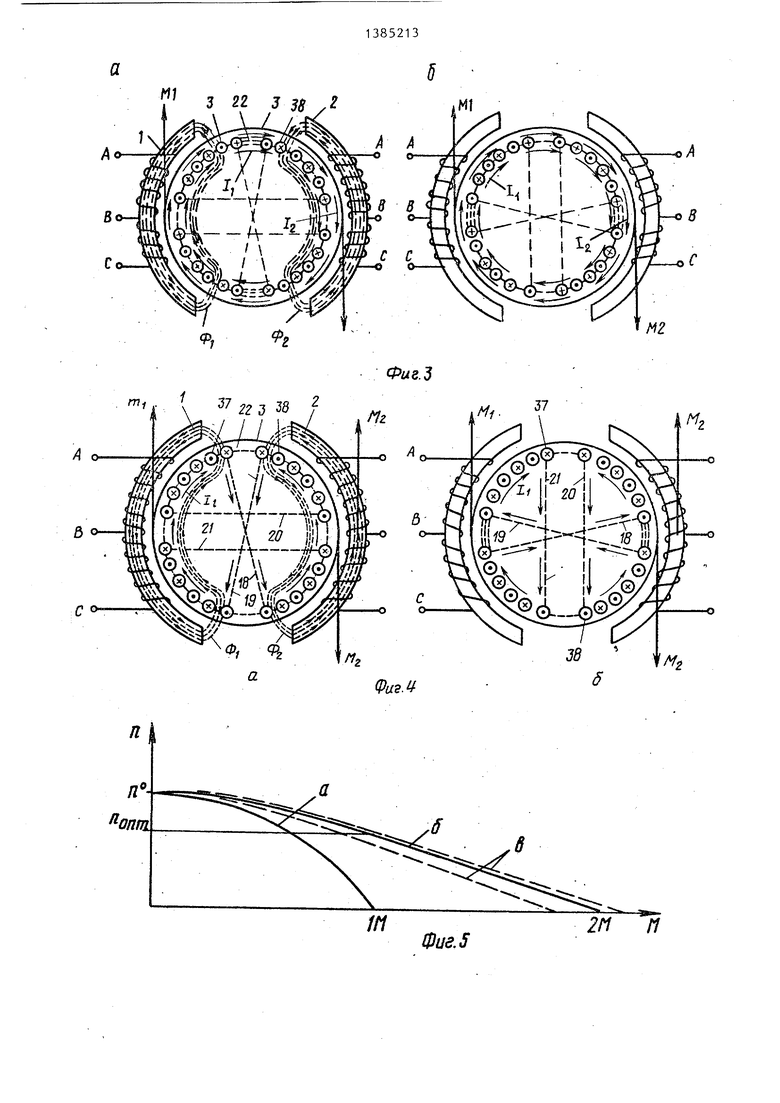
На фиг,1 представлена блок-схема дугостаторного электропривода; на фиг.2 - пример блока управления; на фиг.3(а,б), 4(а-б) -диаграммы токов Б фазе ротора при различных углах его поворота относительно дугостато- ров и на разных режимах работы; на фиг.5,6,7 - механические характерис- ти1уи электропривода, на равных режимах работы; на фит,8 - конструкция ротора двигателя.
Электропривод содержит электродви- гатель с двумя дуговыми статорами 1 и 2 (фиг.), каждый из которых снабжен трехфазной обмоткой с неявновыра- женными полюсами и ротор 3 с обмоткой. Обмотка дугостатора 1 подключена к трехфазной сети 4с фазами А,В,С, Статоры расположены диаметрально противоположно с равным воздушным зазором над боковой поверхностью ротора.
Обмотка 5 ротора 3 выполнена мно- гофазной, каждая фаза которой составлена из четьфех секций 6-9 (фиг.8), равномерно распределенных по окружно- сти ротора 3
Одноименные выводы 10, 11 и 12, 13 диаметрально расположенных секций 6, 8 и 7, 9 в каждой фазе обмотки 5 соединены между собой, а разноименные выводы 14, 15 и 16, 17 смежных секций 6, 9 и 7, 8 соединены между попарно соответственно перемычками 18, 19 и 20; 21 из материала с низким удельным сопротивлением. Кроме того, вьшоды 10, 13 и 11, 12 секций 6,9 и 7,8 соединены попарно перемычками 22 из материала с высоким удельным сопротивлением, например из стали. В электропривод введены управляемые ключи 23 - 25 для подключения обмотки второго дугостатора 2 к фазам А,В,С сети 4, г блок управления 26, и последо- вательно соединенные между собой мостовой выпрямитель 27 и инвертор 28. Вход выпрямителя 27 соединен
с
5 0
5 0
5 «
0 5
0
г
с выводами обмотки второго дугостатора 2, выход инвертора снабжен выводами для подключения к фа зам А,В,С сети. Управляющие входы ключей 23 - 25 и инвертора 28 Соединены с выходами блока управления 26, вход которого подключен к задатчику 29.
Блок управления содержит компаратор 30 (фиг.2), вход которого подключен к выходу задатчика 29, к информационным входам аналоговых ключей 31 и 32, а выход компаратора 30 подключен непосредственно к управляющему входу первого аналогового ключа 34, через элемент НЕ 33 - к управляющему входу второго аналогового ключа 32 « ко входам пяти плат управления 34; вход шестой платы управления 35 соединен с выходом первого аналогового ключа 31, а входы шести плат управления 36 - к выходу второго аналогового ключа 32,
Устройство работает следующим образом.
В начальном положении задатчика 29, соответствующему верхнему значе- |Нию угловой скорости ротора 3 дугостаторного электропровода, блок логического управления 26 открывает при помощи, управляющих сигналов ключи переменного тока 23 - 25, соединяющие сетевые клеммы блока управления с его выходными клеммами, т.е. с обмоткой дугостатора 2. Таким образом, оба дугостатора 1 и 2 оказываются подключенными к трехфазной сети 4.
При этом в воздушном зазоре обоих дугостаторов возникает бегущее магнитное поле, замыкающееся по; апайке магнитопровода дугостатора и стали ротора Ф, и Ф(фиг,3). Ключи пере- .менного тока 23 - 25 подключены своими входами к выходным клеммам блока управления 26 таким образом, что у дугостатора 2 на двух выводах смещена фаза питающего напряжения по сравнению с дугостатором 1 на 120, поэтому направление вращения магнитных потоков дугостаторов 1 и 2 противоположно.
Переменное магнитное поле ф и Ф, наводит в обмотке 5 ротора 3 токи li и 1.
На фиг,За гфедставлен дугостатор- ный электропривод в момент времени, когда ротор 3 находится в положении а, т.е, когда равные части обмотки ротора 3 расположены прямо против дугоствторов 1 и 2, На фиг.З условно показана одна фаза обмотки ротора 3: одна часть 37 обмотки 5 находится против дугостатора 1, другая часть 38 обмотки 5 - против дугостатора 2.
В этом случае ток 1 течет по первой части 37 обмотки 5, проходя через перемычки 22, замыкается во второй части 38 обмотки 5, Ток I наво- дится во второй части 38 обмотки 5, и проходя через перемычки 22, замыкается в первой части 37 обмотки -5, В каждый момент времени направления токов 1 и 1 совпадают (фиг.З).
В результате взаимодействия вра- ща ющегося магнитного поля Ф, с током возникает вращаюищй момент М,, направленный в сторону.вращения магнитного поля Ф,. В результате взаимо действия вращающего магнитного поля ф с током возникает вращающий момент М, направленный в сторону магнитного поля Ф-г. Благодаря тому, что магнитные поля (, и ф вращаются в противоположные стороны, вращающие моменты М и Мг|, приложенные к ротор 3, складываются, и он вращается под действием суммарного момента с синхронной угловой скоростью п°, обуслов ленной числом пар полюсов обмоток дугостаторов 1 и 2. При повороте ротора 3 на 90° - в положение б, когда против дугостаторов 1 и 2 располагаются перемычки 22 (фиг.З), картина токов в частях 37 и 38 обмотки 5 ротора 3 остается прежней, напр.авле- ние и величина вращающих моментов сохраняется. При следующем повороте ротора 3 на 90/ он вновь занимает положение а (фиг.За), затем снова положение б и т.д.
Так как суммарный момент сохраняется постоянным, ротор 3 равномерно вращается с синхронной угловой ско- ростью. При этом возникающие силы притяжения между ротором 3 и дугоста торами 1 и 2 равны друг другу и направлены в разные стороны (дугостато- ры 1 и 2 расположены диаметрально
противоположно с одинаковым воздушным зазором над боковой поверхностью ротора) и, компенсируя друг друга, уравновешивают ротор 3. Величина токов О и 3 зависит как от ЭДС дугостаторов, так и от сопротивления цепи контуров.
В данном случае сопротивление замкнутого контура, состоящего из
.
Q Q
5
0
5
двух равных частей 37 и 38 обмоток 5 и перемычек 22, обуславливается величиной сопротивления перемычек 22; их сопротивления намного вьшге сопротивления обмоточного провода, так как они выполнены из материала с более высоким удельным сопротивлением.
Таким образом, если перемычки 22 изготовлены, например, из стали, характеристика дугостаторного электропривода в этом случае будет эквивалентна характеристике асинхронного электродвигателя со стальным ротором и иметь вид, показанный на фиг;5.
Преимущество мягкой характеристики заключается в больших пусковых моментах и возможности устойчивого.нращеипя ротора во всем диапазоне угловых скоростей от синхронной до нуля, , На фиг.З представлена механическая характеристика (я) электропривода с одним дугостатором, сумь арная характеристика (б) -электропривода с двумя асинхронными дуговыми статорами. Изменяя геометрию перемычек 22 (сечение, длину) , а также их электро- Ьроводиые свойства, можно подобрать необходимую механическую характеристику (в) данного электропривода для конкретного типа технологического оборудования -(фиг,5),с максимальным КПД в точке качестве ключей переменного тока 23 - 25 (фиг.1) можно использовать, например, тиристор- ные схемы со встречно-параллельным включением тиристоров, пропускающих по очереди положительную и отрицательную полуволну питающего напряжения.
При изменении положения движка задатчика-29 в сторону уменьшения угловой скорости п блок логического управления 26 изменяет угол зажигания одного из пар тиристоров хдабого ключа переменного тока 23 - 25, например, ключа 25.
Поскольку другая полуволна оста- ется без изменения, возникает асимметрия фаз А питающего напряжения (неравенство полуволн), что, в свою очередь, приведет к появлению постоянной составляющей напряжения в фазе А, действующей на вращаюнрйся ротор с током, как тормозное усиление. Чем дальще положение движка асимметрии задатчика 29 от начального положения, тем больше асимметрия фазы А, увеличение доли постоянной составляющей в ней .и, следовательно, увеличение тормозного усиления на ротор, что приводит к уменьшению его угловой скорости из-за мягкой механической характеристики (erne одно преимущество мягкой характеристики электропривода) .
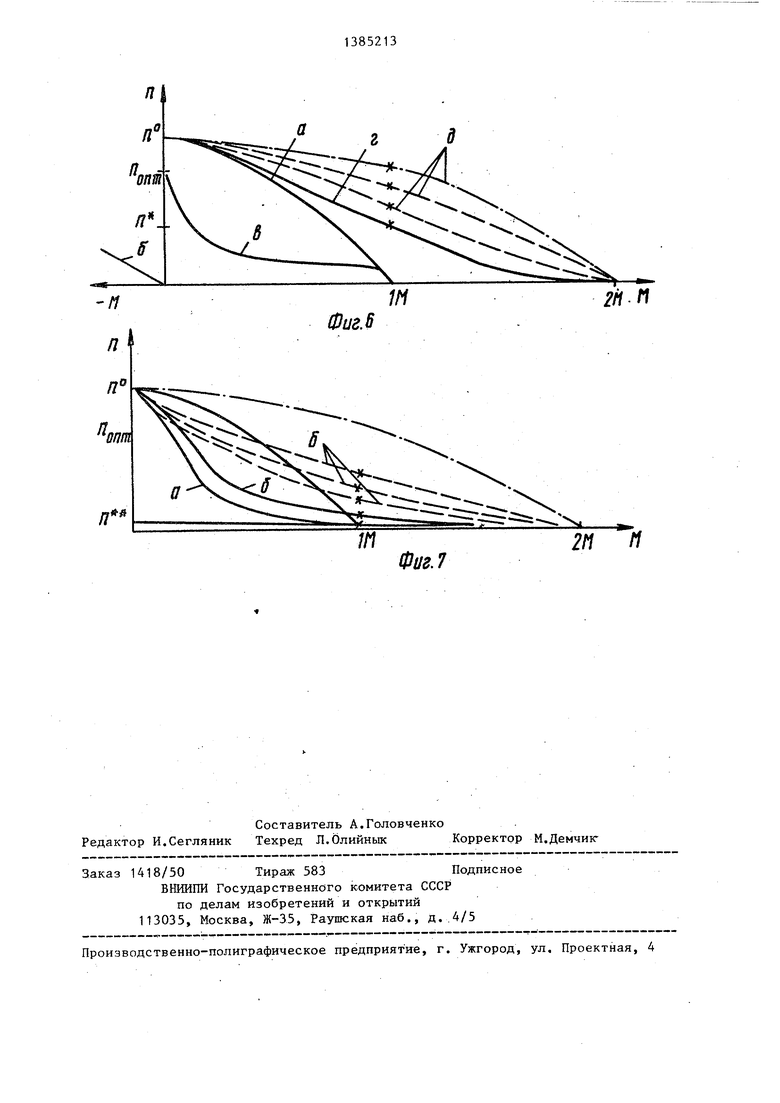
Рассмотрим механическую характеристику электропривода в данном режиме,Q 20, вторая часть 38 обмотки 5, пере- Дугостатор 1 включен в, се,ть непосредственно и механическая характеристика (а фиг,6) привода от его воздействия не изменилась.
Дугостатор 2 работает в совмещен- ном режиме и воздействует на ротор 3 двумя усилиями: -двигательным (а) и тормозным (б) (фиг.6). Суммарная характеристика взаимодействия статора 1 и дугостатора 2 дает механическую характеристику (г) дугостаторного электропривода в совмещенном режиме (фйг.6)„
Таким образом, можно изменить угловую скорость ротора 3 от синхронной 25 ка дугостатора 2 возникает вращающий момент М, приложенный к дуго20
мычка 19, Ив этом случае сохраняется картина направлений токов относительно дугостаторов 1 и 2, В результате взаимодействия вращающегося магнитного потока Ф, и тока 1, возникает вращающий момент М, направленный в сторону вращения магни тног) поля. Часть 38 трехфазной обмотки 5 ротора 3 создает вращающийся магнитный .поток Ф, замыкающийся в дугоста- торе 2, который наводит в обмотках дугостатора 2 ток.
В результате взаимодействия вращающегося магнитного потока ф и тоскорости п° до некоторой скорости п , двигаясь по семейству характеристик (д) до характеристик (г).
При пoмoa и описанных технических средств возможно и дальнейшее сниже- OQ кие угловой скорости ротора (от 0,05- Oj1 п), однако в этом случае почти вся энергия, потребляемая дугостато- ром 2, пойдет на поддержание тормозного усиления и энергетические характеристики привода будут невысоки.
Можно считать оптимальным и экономически целесообразным глубину регулирования угловой скорости ротора 3 методом совмещенного режима около 1:3 (до п 0,3 п°) , В этом случае КПД электропривода будет, не хуже 0,5,
При дальнейшем изменении положения движка задатчика блок логического управления закрывает ключи 23 - 25 переменного тока и открывает инвертор 28.
Таким образом, к сети остается подключенным лишь дугостатор 1, трехфазная обмотка которого создает вра35
40
45
,-, 50
статору-2 и направленный в сторону вращающегося магнитного потока. Так как дугостатор 2 закреплен
неподвижно, этот же момент действует на вращающийся ротор 3 в противопо ложном направлении, совпадающим с направлением его вращения. Таким образом, на ротор 3 действует суммарный движущий момент М - М.;, и он вращается с малой угловой скоростью (с большим скольжением) относительно
угловой синхронной скорости магнитного ПОЛЯ. Энергия скольжения, выделенная в роторе, со стороны ду госта- тора 1 при создании момента М наводится в дугостаторе 2 при создании момента KI и через трехфазный выпрямитель 13 (фиг,1) и инвертор 14 возвращается обратно в сеть. Характеристика электропривода в этом режиме будет иметь вид я, представленный на фиг.7. Изменение положения движка задатчика 9 приводит к изменению доли возвращаемой в сеть энергии при помощи, управляемого инвертора 28 и, следовательно, к появлению семейства характеристик (фиг.7), по. которым можно опускаться вниз до малой и даже ползучей скорости п . При этом электроэнергию потребляет один дугостатор 1, а суммарный момент получается двойной (М 1-М0. Полезная работа в этом случае Рг (М -ьМ i)n.
щаюпщйся магнитный поток. Переменный магнитный поток ф, наводит в первой части 37 обмотки 5 тот же ток 1 (фиг.4а). Однако замыкается он теперь не через стальные перемычки 22, а по пути наименьшего сопротивления: в положение а перемычка 18, вторая часть 38 обмотки 5, перемычка 19 - первая часть 37 обмотки 5 (фиг,4а).
,-,
Во второй части 38 обмотки 5 ток 1 теперь течет в том же направлении, что в первой ее части 37 (снизу вверх). В положении (фиг,4) ток замыкается По контуру: первая часть 37 обмотки 5,перемычка 21, вторая часть 38 обмотки 5, перемычка 18,пер- вая часть 37 обмотки 5, перемычка
20, вторая часть 38 обмотки 5, пере-
ка дугостатора 2 возникает вращающий момент М, приложенный к дуго
мычка 19, Ив этом случае сохраняется картина направлений токов относительно дугостаторов 1 и 2, В результате взаимодействия вращающегося магнитного потока Ф, и тока 1, возникает вращающий момент М, направленный в сторону вращения магни тног) поля. Часть 38 трехфазной обмотки 5 ротора 3 создает вращающийся магнитный .поток Ф, замыкающийся в дугоста- торе 2, который наводит в обмотках дугостатора 2 ток.
В результате взаимодействия вращающегося магнитного потока ф и то,
OQ ,
35
40
45
50
55
статору-2 и направленный в сторону вращающегося магнитного потока. Так как дугостатор 2 закреплен
неподвижно, этот же момент действует на вращающийся ротор 3 в противопо ложном направлении, совпадающим с направлением его вращения. Таким образом, на ротор 3 действует суммарный движущий момент М - М.;, и он вращается с малой угловой скоростью (с большим скольжением) относительно
угловой синхронной скорости магнитного ПОЛЯ. Энергия скольжения, выделенная в роторе, со стороны ду госта- тора 1 при создании момента М наводится в дугостаторе 2 при создании момента KI и через трехфазный выпрямитель 13 (фиг,1) и инвертор 14 возвращается обратно в сеть. Характеристика электропривода в этом режиме будет иметь вид я, представленный на фиг.7. Изменение положения движка задатчика 9 приводит к изменению доли возвращаемой в сеть энергии при помощи, управляемого инвертора 28 и, следовательно, к появлению семейства характеристик (фиг.7), по. которым можно опускаться вниз до малой и даже ползучей скорости п . При этом электроэнергию потребляет один дугостатор 1, а суммарный момент получается двойной (М 1-М0. Полезная работа в этом случае Рг (М -ьМ i)n.
7138
При очень малых значениях п (на ползучих скоростях) величина значительно меньше потребляемой электроэнергии дугостатором 1 и вся лишняя электроэнергия за вычетом потерь в трехфазном мосте 27 и инвертора 28 рекуперируется в сеть.
Блок управления (фиг,2) работает следующим образом.
При начальном положении движка задатчика 29, соответствующем максимальной угловой скорости ротора привода, включается компаратор 30 и своим сигналом включает через анало- говый ключ 31 плату управления 5 и непосредственно платы управления 4, управляющие тиристорами ключей переменного тока 23 - 25 через элемент НЕ 34. Компаратор. 30 выключает анало говый ключ 32. В этом случае включаются ключи переменного тока 23-25 и ротор 3 вращается с синхронной угловой скоростью. Изменение положения движка задатчика 29 приводит к при- крыванию тиристора ключа 25 фазы А, пропускающего одну из полуволн, при помощи аналогового ключа 31, действующего на плату управления 35. Ротор 3 уменьшает свою угловую скорост из-за- возникновения тормозного усиления.. Дальнейшее изменение движка задатчика 29 приводит к закрыванию компаратора 30 (в момент, соответствующий ,3 п°) иJследовательно, закрыванию плат управления 34 и 35, т.е. выключению ключей переменного тока 23 - 25. Через элемент НЕ 34 закрытый компаратор 30 включает аналоговый ключ 32, даюкщй разрещение на включение через платы управления 26 инвертора 28 и дальнейшее управление им при помощи задатчика 29.
Таким образом, данный дугостатор- ньй электропривод имеет больший Днапазон регулирования угловой скорости (1:1000) и, следовательно, может быт использован в качестве безредукторно го электропривода яизкоскоростного оборудования, что является доказательством расширения его функциональных возможностей. При этом улучшаются энергетические характеристики электропривода на номинальных и пониженных оборотах, что выражается в повышении .КПД на номинальных оборотах за счет уравновешивания ротора диаметральной установкой двух дугостато- ров и на пониженных оборотах за счет рекуперации энергии скольжения ротора в сеть и получении двойного момента. Улучшение коэффициента мощности получается за счет выбора соответствующего угла зажигания тиристоров инвертора.
Формула изобретения
Регулируемый электропривод для низкоскоростного технологического оборудования, содержаи1рй электродвигатель с дуговыми статорами, на каждом из которых расположена многофазная обмотка с неявно выраженными полюсами, обмотка одного дугового статора снабжена выводами для подключения к сети, и ротор с обмотками, о тличающийся тем, что, с целью увеличения диапазона регулирования частоты вращения и повышения энергетических показателей, обмотка ротора выполнена многофазной, каждая фаза обмотки ротора составлена из четырех секций, равномерно распределенных по окружности ротора, одно-- именные выводы диаметрально расположенных секций и одни разноименные выводы смежно расположенных секций каждой фазы обмотки ротора соединены между собой перемычками из материала с низким удельным сопротивлением, а другие разноименные выводы смежно расположенных секций этой же фазы - перемычками из материала с высоким удельным сопротивлением, например из стали, и введены управляемые ключи для подключения многофазной обмотки второго дугового статора к сети, блок управления, последовательно соединенные между собой мостовые выпрямитель и инвертор, вход выпрямителя соединен с выводами многофазной обмотки второго дугового статора, а выход инвертора снабжен выводами для подключения к сети, управляющие входы указ анных ключей и инвертора сое- :динены с выходом блока управления.
-0ГП д S с
/f КС
к Кб к ка
t t t t t Т
fr
iii ш u
о
j
j/
5У
15
ж
д
5
Ж
LZH
0t../
. )индерто1зу f
ffi
78
i/г. 2
а
3 22 J г
mi
{ 7 22 3 38 ;
с о
Ml
Фиг.З
/V,
Фиг.
Фиг. 5
2П П
п
Й
Фиг.7
| Калинский Д.М | |||
| и др | |||
| Применение дугостаторных асинхронных двигателей в автоматизированном электроприводе прессов | |||
| Автоматизированный электропривод | |||
| М.; Энергия, 1980, с.258, рис.1 | |||
| УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ ВО ВРАЩЕНИЕ МАШИН-ОРУДИЙ | 1932 |
|
SU42629A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
