оо
00. У
-v)
CD ГС
Изобретение относится к средствам автоматизации, а именно к устройствам, формирующим сигнал при достижении поршнем исполнительного механизма своих крайних положений.
Цель изобретения - повьшение надежности и расширение функциональных возможностей путем обеспечения контроля за положением поршня при отсутствии давления в каналах управления исполнительного механизма.
На чертеже представлена схема исполнительного механизма с датчиком крайних полол ений поршня.
Исполнительный механизм с датчи- ком крайних положений поршня содержит цилиндр 1, поршень 2 со штоком, установленный в цилиндре 1 с образованием рабочих полостей 3 и 4. Узел 5 формирования выходного сигнала включает двухмембранные реле 6 и 7. Реле 6 и 7 имеют камеры 8, 9 и 10, II управления, входы 12 и 13, выходы 14 и 15 и внутренние камеры 16 и 17 заглушены. Вход 12 реле 6 сообщен с источником питания, а его в.ыход 14 сообщен с входом 13 реле 7. Цилиндр 1 имеет подводящие каналы 18 и 19 с контрольными точками 20 и 21. Каме ра 8 управления реле 6 сообщена с контрольной точкой 20 цилиндра 1 и камерой 11 управления реле 7. Камера 9 управления реле 7 сообщена с контрольной точкой 21 цилиндра 1 и камерой 10 управления реле 6.
Исполнительный механизм с датчиком крайних положений поршня работае следующим образом.
Когда поршень 2 цили1щра 1 находится в одном из крайних положений, например в левом, давление управления в каналы 18 и 9 не подается, на выходе контрольных точек 20 и 21 сигнал равен 0. Давление питания подается на вход 12 реле б, при этом реле 6 переключается и давление питания с его выхода 14 подается на вход 13 реле 7 переключает его, и на выходе 15 реле 7 появляется сигнал, -При смещении поршня 2 вправо без сигнала управления в канале 18) в
0
5
0
25
30
35
40
5
0
контрольной точке 21 появляется сигнал, равный давлению слива, который подается в камеру 10 управления реле 6 и переключает зто реле, отсекая давление питания от выхода 14 реле 6. Соответственно на выходе 15 реле 7 будет 0.
При смещении поршня 2 вправо под действием сигнала управления в канале 18 давление управления через контрольную точку 20 подается в камеру 8 управления и переключает реле 6, подавая давление питания на выход 14 этого реле и на -вход 13 реле 7. В тоже время-давление управления подается ,и в камеру I1 управления реле 7 и переключает его, отсекая вход 13 от выхода 15; на выходе - 0.
Таким образом, в крайних положениях поршня 2 цилиндра I при нали- ч:ии сигналов .в каналах 18 и 19 и без них на выходе 15 датчика будет сигнал, свидетельствующий о конечном положении поршня 2, при смещении же поршня 2 из конечного положения, как под действием сигналов управления так и без них, на выходе датчика сигнал будет равен 0.
Фо рмула из о б ре.тения
Исполнительный механизм с датчиком крайних положений поршня, содержащий цилиндр-, поршень со штоком, установленный в цилиндре с образованием рабочих полостей, и узел формирования выходного сигнала, связанный с контрольными точками цилиндра и выполненный в виде логического элемента И, отличающийся тем, что, с целью повьш1ения надежное ти и расширения функциональных возможностей, логический элемент И вы-. полней в виде двухмембранных реле, при этом одна из камер управления каж;з;ого из реле сообщена с рабочей полостью в. контрольной точке и с второй камерой управления другого реле, причем вход первого реле сообщен с источником питания, а его выход - с входом второго реле.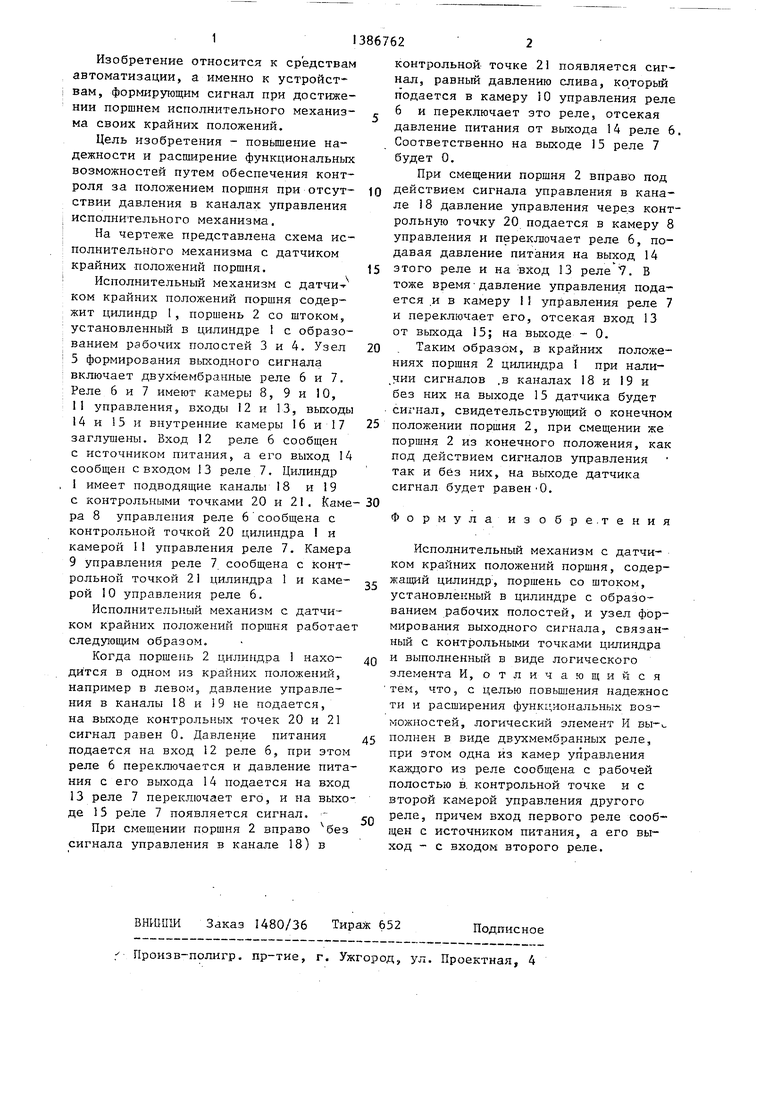
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дозирования жидких химикатов | 1990 |
|
SU1838812A3 |
| Устройство для дистанционного контроля состояния пневматических аналоговых исполнительных механизмов | 1987 |
|
SU1522158A1 |
| Автоматический манипулятор для фиксации задних конечностей коровы | 1987 |
|
SU1628989A1 |
| ПНЕВМАТИЧЕСКОЕ РЕЛЕ | 1971 |
|
SU320647A1 |
| Пневматическая система управления циклическими процессами | 1985 |
|
SU1339498A1 |
| Пневматическое устройство для управления шаговым распределителем | 1981 |
|
SU970324A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ СЦЕПЛЕНИЕЛ\ И СТУПЕНЧАТОЙ КОРОБКОЙ ПЕРЕДАЧ ТРАНСПОРТНОЙ | 1973 |
|
SU368085A1 |
| УСТРОЙСТВО КОНТРОЛЯ ПЕРЕДНЕГО ПОЛОЖЕНИЯ СЕКЦИЙ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1990 |
|
RU2015340C1 |
| Система тормозного оборудования для железнодорожного транспортного средства | 2021 |
|
RU2763060C1 |
| Пневматический счетный триггер | 1991 |
|
SU1748145A1 |
Изобретение позволяет повысить надежность и расширить функциональные возможности механизма путем обеспечения контроля за положением поршня при отсутствии давления в его каналах управления. Узел 5 формирования выходного сигнала выполнен в виде логического элемента И, состоящего . из двухмембранных реле 6 и 7, и связан с контрольными точками (КТ) 20 и 21 цилиндра 1. Вход 12 реле 6 сообщен с источником питания, а его выход 14 сообщен с входом 13 реле 7. Камера 8 управления реле 6 сообщена с КТ 20 и камерой 11 управления реле 7. Камера 9 управления реле 7 сообщена с КТ 21 и камерой 10 управления реле 6. В крайних положениях поршня 2 независимо от наличия сигнала в подводящих I каналах 18 и 19 на выходе 15 реле 7 будет сигнал о конечном положении поршня, при смещении же его из конечного положения также независимо от наличия сигналов управления на выходе сигнал будет равен 0. ) ил. S
| Цилиндр с датчиком крайних положений поршня | 1984 |
|
SU1180565A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
