Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах для программного управления исполнительных механизмов в процессе обработки изделий микроэлектроники, а частности для координатных перемещений сварочной головки при формировании проволочных соединений
между контактными площадками кристалла и траверз корпуса интегральных схем и больших интегральных схем.
Целью изобретения является повышение точности позиционирования и обеспечение высокой производительности процесса.
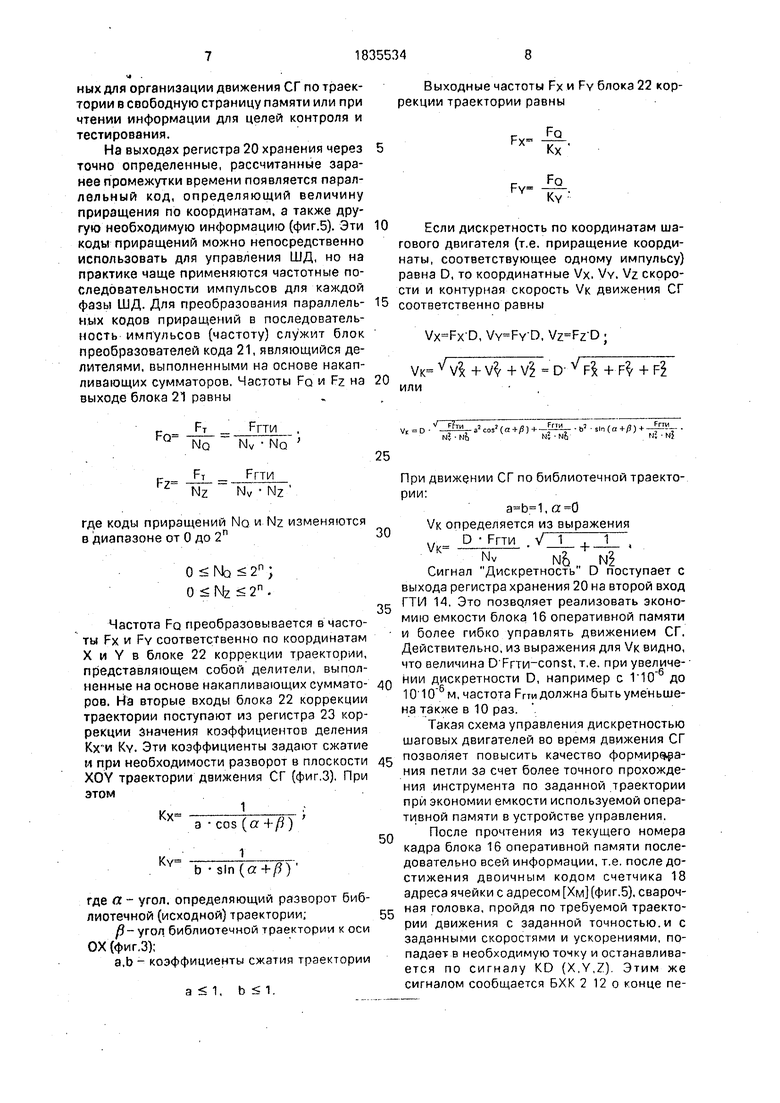
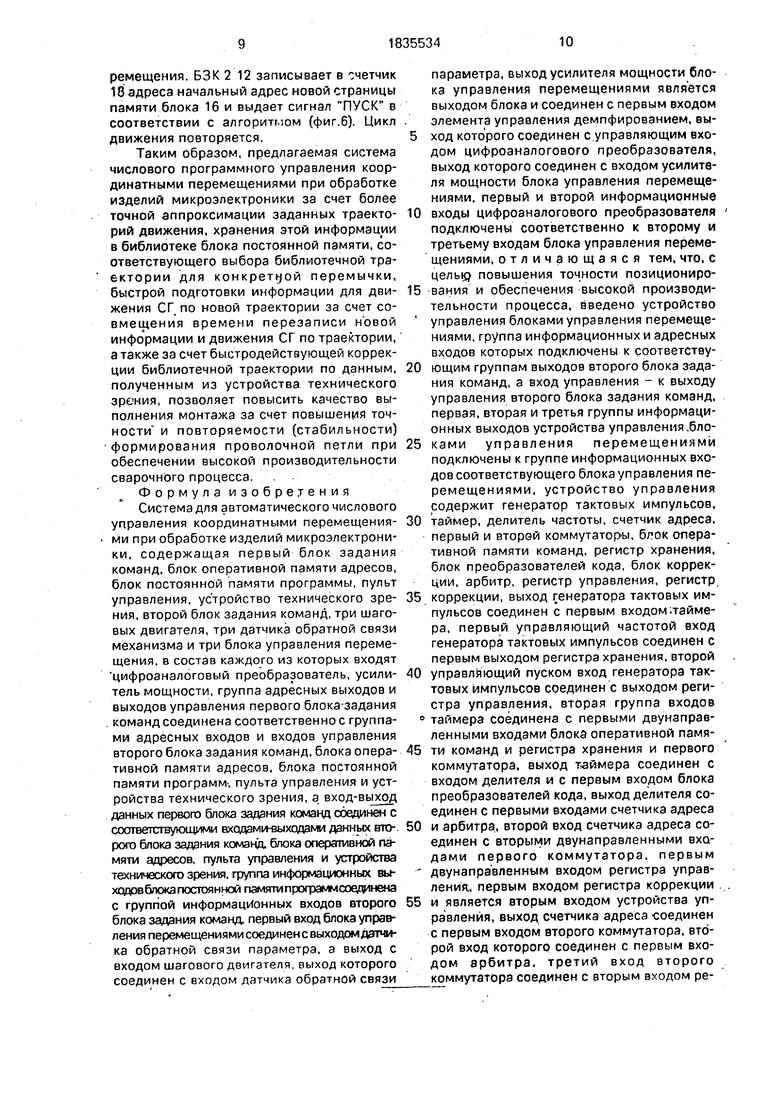
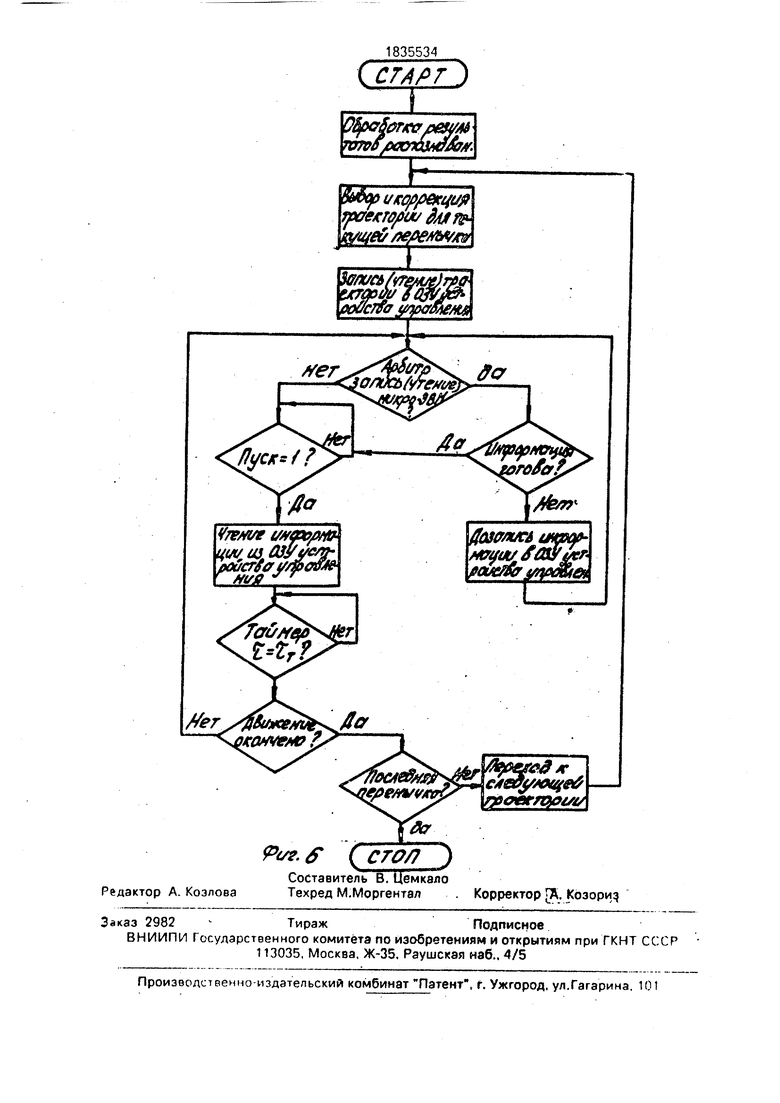
На фиг,1 представлена блок-схема предлагаемой системы управления; на фиг.2 - функциональная схема устройства управления; на фиг.З - траектории движения сварочной головки; на фиг.4 - фрагмент траектории движения сварочной головки; на фиг.4 - фрагмент траектории движения сварочной головки; на фиг.5 - блок-схема оперативной памяти команд, используемой в устройстве управления; нз фиг.6 - блок- схема алгоритма работы системы управления.
Система содержит первый блок 1 задания команд (БЗК 1); блок оперативной памяти адресов (ОП) 2; блок постоянной памяти программы (ПП) 3; пульт управления 4, с которого формируется технологом-программистом исходная информация для работы всей системы, К этой информации относится задание необходимой траектории движения СГ, скоростей и ускорений на нескольких участках ее; ограничения на максимальные значения скоростей и ускорений; технологические, конструктивные параметры - номер перемычки в ИС, тип корпуса и т.п. Система содержит также блоки управления перемещениями (БУП) 5, предназначенные для осуществления перемещения СГ по координатам X,Y,Z; устройство б технического зрения, необходимое для получения информации о реальном расположении кристалла в корпусе ИС и содержащее оптическую телевизионную систему и электронный блок обработки сигналов этой системы. Каждый БУП 5 содержит циф- роаналоговый преобразователь 7, усилитель мощности 8, устройство управления демпфированием 9, Командные сигналы с выхода БУП 5 поступают на обмотки управления шаговым двигателем 10. Информация с датчиков обратной связи 11 подается для обработки на вход БУП 5.
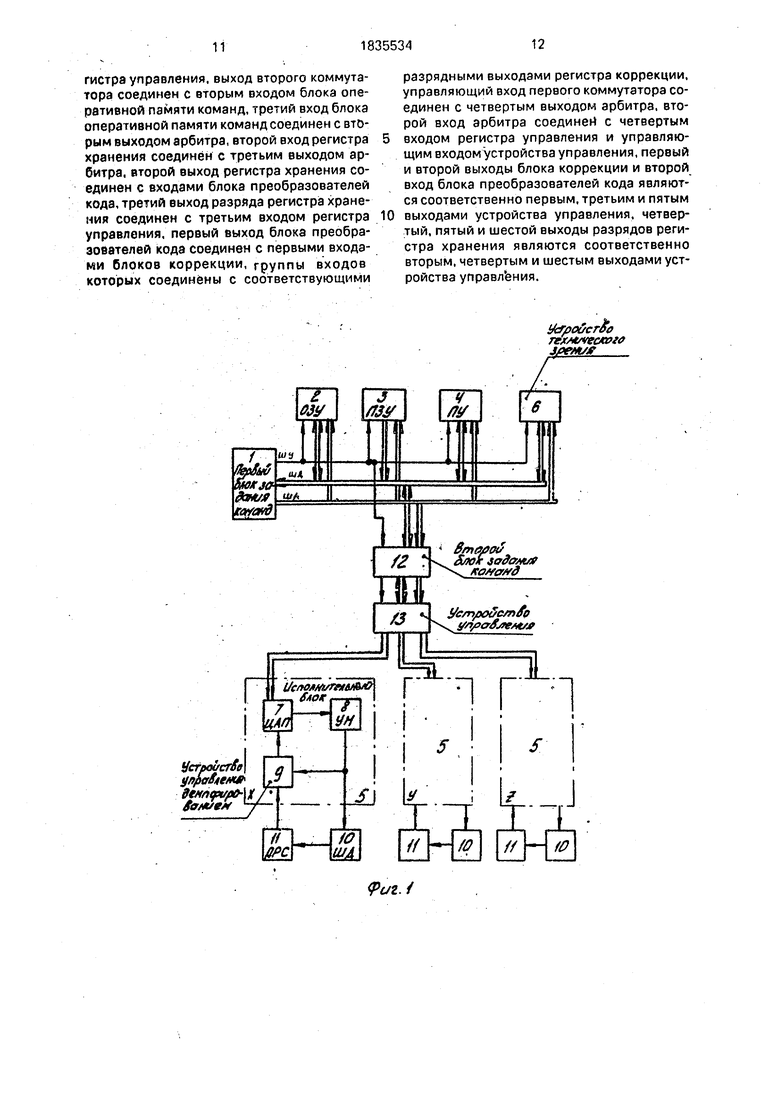
Второй блок 12 задания команд (БЗК) 2, выполненный как и первый блок 1 БЗК 1 на базе микросхемы К580 ИК 80, принимает информацию, обрабатывает и передает ее в устройство 13 управления, которое включает (см.фиг.2) генератор 14 тактовых импульсов (ГТИ); таймер 15, вырабатывающий очередной импульс в соответствии с частотой ГТИ 14 и кодом, поступающим из блока 16 оперативной памяти команд; делитель 17 частоты; счетчик 18 адреса, выходной код которого поступает на первый коммутатор 19; регистр 20 хранения, предназначенный для хранения информации, поступающей из блока оперативной памяти команд; блок 21 преобразователей кода, являющийся делителями частоты и преобразующий параллельный код координатного перемещения в
частоту выходных импульсов; блок 22 коррекции траектории, выполненный на много- рззрядных делителях; регистр 23 коррекции, предназначенный для хранения
коэффициентов преобразования (коррекции) исходной траектории (фиг.З) движения ЗГ; коммутатор 24, управляющий направлением передачи информации из блока 16 опе- ративной памяти команд; регистр 25
Q управления, предназначенный для формирования управляющих сигналов (Пуск, Стоп и т.п.), арбитр 26, позволяющий в процессе работы УУ 13 записывать или читать информацию из блока 16 оперативной
5 памяти команд.
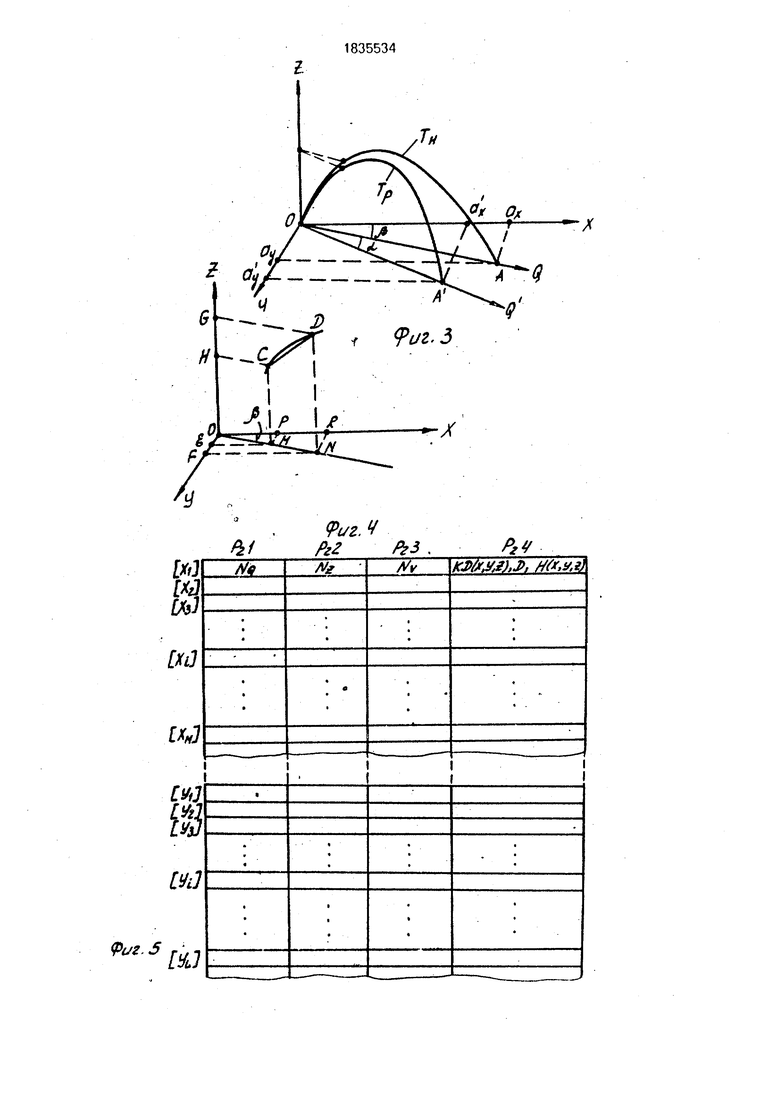
При обмене информацией УУ 13 представляется для БЗК 2 12 обычным ОЗУ, куда по адресу Xi записываются коды приращения величин перемещений по обобщенной
0 координате .4). коды прираще- нийтю координате Z: NZ IGH и расчетные значения кодов Nv, определяющих промежутки времени между выдачей из УУ 13 очередных приращений координат в блоки
5 управления перемещениями 5.
Эти коды рассчитываются на основе желаемых динамических параметров (контурных скоростей, ускорений) движения СГ по траектории и ограничений, накладываемых
0 возможностями исполнительного привода. В устройство 13 управления записывается также информация о направлении движения СГ: Н (Х,У.г)(фиг.5), дискретности D-ша- гового двигателя (при электрическом
5 дроблении шага), данные о конце движения по траектории KD (X,Y,Z).
Система для автоматического числового управления координатными перемещениями при формировании проволочных межсо0 единений в ИС работает следующим образом.
Перед началом работы сварочной машины в ПП 3 (фиг.1) записывают рассчитанную заранее для идеально расположенного по
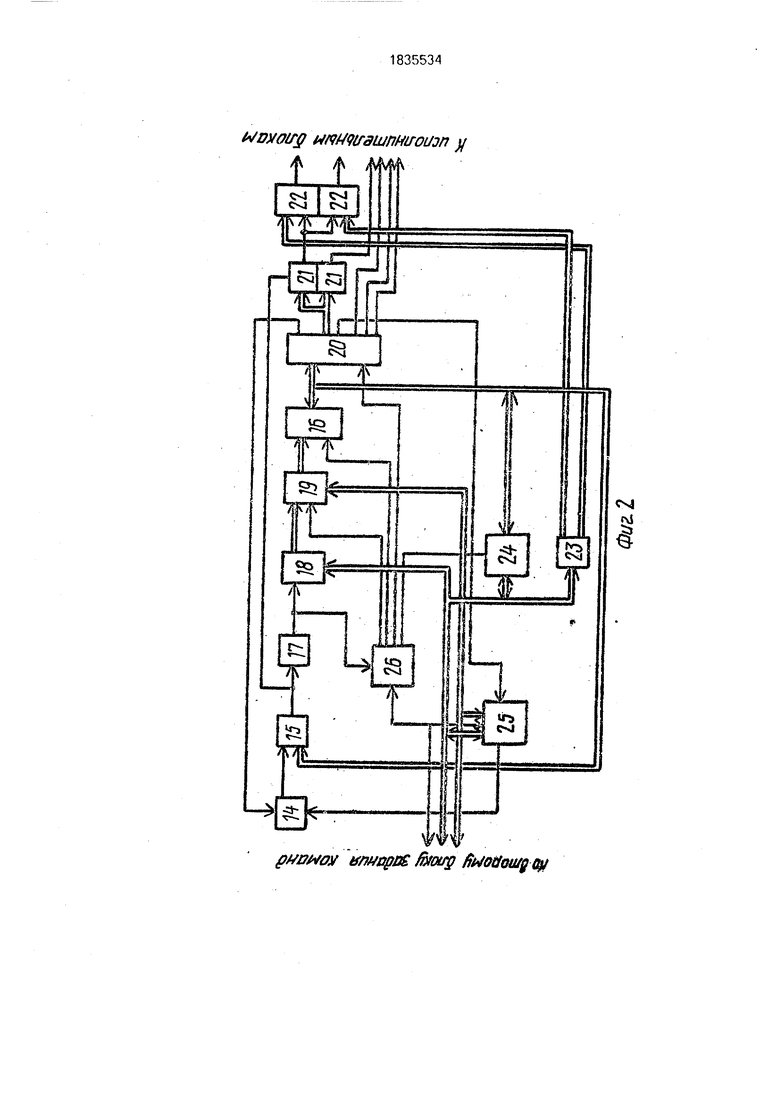
5 отношению к рамке кристалла ИС ходную информацию для формирования устройством 13 управления необходимой траектории Ти (фиг.З) движения СГ. Такая информация формируется и записывается
0 для нескольких диапазонов изменения расстояния между позициями первой и второй сварки (отрезок ОА) (фиг.З).
Непосредственно перед началом работы сварочной машины первый блок 1 зада5
ния команд получает от устройства технического зрения 6 информацию о погрешностях посадки крис.галла на несущую рамку интегральной схемы. Фактические расстояния между конглктыми площадками траверз и кристалла ИС при -ном изменяются (отрезок ОА) (фиг.З). На основе этой информации второй блок 12 задания команд записывает из ПП 3 в устройство 13 управления данные о той библиотечной траектории движения, проекция которой на плоскость ХОY (фиг.З) является наименьшей из превосходящих фактическое расстояние I между точками сварки:
mln( И-ф1),
где iTelxov - проекция библиотечной траектории на плоскость XOY.
Такой выбор траектории позволяет повысить быстродействие системы управления координатными перемещениями за счет ускоренной реализации (на делителях) коррекции траектории движения и разгрузки первого блока 1 задания команд для решения необходимых задач.
После записи из ПП 3 в устройство 13 управления вышеперечисленной информации заканчивается подготовительный и на- чинаегся рабочий этап разварки контактных площадок ИС.
Исходное состояние блоков (фиг.2)- выходной код счетчика 18 адреса настроен на начало текущей страницы блока 16 оперативной памяти; регистр 20 - хранения - нулевое состояние; регистр 23 коррекции - значения коэффициентов коррекции по координатам X и Y.
После прихода на.УУ 13 команды ПУСК, т.е. команды, инициализирующей начало движения СГ, УУ 13 работает автономно (не нуждается в какой-либо информации). При этом первый блок 1 задания команд обслуживает периферийные устройства, выполняет сервисные программы, контролирует технологические параметры и т.п.; второй блок 12 задания команд подготавливает информацию для движения СГ по следующей траектории, записывая эти данные в свободную страницу памяти КК 13, например, по адресу Yi (фиг.5). Возможность доступа к блоку 16 оперативной памяти, используемой в УУ 13 со стороны второго блока 12 задания команд или со стороны внутренних узлов УУ 13, осуществляет арбитр 26. Он выполнен по принципу запоминания запроса обращения и выполнения его после окончания текущего действия (чтения или записи). Задержки на обслуживание запросов могут быть легко рассчитаны и пракически не влияют на работоспособность истемы числового управления траектор- ных перемещений.
Применение такого способа обслуживания запросов позволяет повысить быстроействие системы автоматизированного
управления координатными перемещениями СГ за счет распараллеливания времени обработки(использования)информации. Таким образом, после прихода команды
Пуск (фиг.6) выбирается первая ячейка блока 16 оперативной памяти. По сигналу, поступающему из арбитра 26, информация из регистров РГ1, РГ2, РГ4 (фиг.5) блока 16 оперативной памяти записывается в ре0 гистр 20 хранения, а информация из регистра РгЗ-- поступает и записывается в таймер 15, работающий в режиме вычитания и перезаписи кодов скорости Nv по обнулению после,окончания счета. На другой вход тай5 мера 15 поступает опорная частота Ргти из ГТИ 14.
На выходе таймера 15 формируется частота Г-т:
Ртг Ргти
0
Nv
поступающая на вход делителя 17 частоты, коэффициент Кп деления которого вычисля-. ется, исходя из требуемой точности прохождения СГ по траектории и разрядности регистров РГ1 и РГ2 (фиг.5) используемого блока 16 оперативной памяти. Этот коэффициент деления выбирается кратным величине 2П, ,2,3... т.е.
Кп-2п.
Каждый импульс, поступающий с выхода делителя 17 на вход счетчика адреса 18, наращивает последовательно его выходной длоичный код, поступающий на адресный
вход блока 16 оперативной памяти, Выходная частота FN делителя 17 поступает также на вход арбитра 26
40
FN
Ргти Nv -Кп
На второй вход счетчика 18 адреса по- ступает и записывается перед началом движения СГ с шины данных БЗК 2 12 код,
определяющий его исходное состояние, т.е. необходимую страницу, блока 16 оперативной памяти. Выходной код счетчика 18 адреса, поступающий через коммутатор 19 на адресные входы блока 16 оперативной памяти, позволяет последовательно выбирать из него необходимую для движения СГ по траектории информацию, поступающую на выходы регистра 20 хранения и таймера 15 и записываемую в них сигналами, поступающими из арбитра 26. Коммутатор 19 позволяет также подключать по управляющему сигналу, поступающему из арбитра 26 шину адреса БЗК 2 13 на адресный вход блока 16 оперативной памяти при записи новых данных для организации движения СГ по траектории в свободную страницу памяти или при чтении информации для целей контроля и тестирования.
На выходах регистра 20 хранения через точно определенные, рассчитанные заранее промежутки времени появляется параллельный код, определяющий величину приращения по координатам, а также другую необходимую информацию (фиг.5). Эти коды приращений можно непосредственно использовать для управления ШД, но на практике чаще применяются частотные последовательности импульсов для каждой фазы ШД. Для преобразования параллель- ных кодов приращений в последовательность импульсов (частоту) служит блок преобразователей кода 21, являющийся делителями, выполненными на основе накапливающих сумматоров. Частоты FQ и FZ на выходе блока 21 равны
Выходные частоты FX и FY блока 22 коррекции траектории равны
FQ Кх
1Р KY
Если дискретность по координатам шагового двигателя (т.е. приращение координаты, соответствующее одному импульсу) равна D, то координатные Vx, VY. Vz скорости и контурная скорость VK движения СГ соответственно равны
, ,
VK Л/% + VY + V2 D- VF$ + FY + FZ или
| название | год | авторы | номер документа |
|---|---|---|---|
| Вероятностное устройство для решения краевых задач | 1982 |
|
SU1101838A1 |
| Устройство для отображения информации | 1986 |
|
SU1506478A1 |
| СИСТЕМА ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2003 |
|
RU2256937C1 |
| Устройство для трансляции логических адресов в адреса памяти на магнитных дисках | 1981 |
|
SU966695A1 |
| Устройство для вычисления параметров сеток для решения разностных уравнений | 1986 |
|
SU1413642A1 |
| Устройство для отображения информации на телевизионном приемнике | 1979 |
|
SU932531A1 |
| Линейно-круговой интерполятор | 1979 |
|
SU847279A1 |
| Устройство для опроса информационных каналов | 1982 |
|
SU1062677A1 |
| Устройство для контроля полупроводниковой памяти | 1985 |
|
SU1319079A1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах для программного управления исполнительных механизмов в процессе обработки изделий микроэлектро- ники, в частности для координатных перемещений сварочной головки при формировании проволочных соединений между контактными площадками кристалла и траверз корпуса интегральных схем и больших интегральных схем. Цель изобретения - повышение качества выполнения монтажа за счет повышения точности формирования проволочной петли при обеспечении высокой производительности процесса. Для достижения цели в систему, содержащую первый и. второй блоки задания команд, блок оперативной памяти адресов, блок постоянной памяти программ, пульт управления, устройство технического зрения и в каждой координате шаговый делитель, датчик обратной связи параметров, блок управления перемещениями введено устройство управления блоком управления перемещениями, входы которого связаны с выходами первого блока задания команд, а выходы - с входами перемещений блоков по каждой координате. Цель достигается также тем, что устройство управления содержит генератор тактовых импульсов, таймер, делитель, счетчик адреса, коммутаторы, блоки оперативной памяти, преобразователь кода, коррекции, арбитр, регистры, хранений, управления и коррекции. 6 ил. 00 со ел ел со
FT FrjH .
NQ Nv Ncf ; FT Frrn
NZ Nv NZ
где коды приращений NQ и NZ изменяются в диапазоне от 0 до 2П
.
Частота FQ преобразовывается в частоты FX и FY соответственно по координатам X и Y в блоке 22 коррекции траектории, представляющем собой делители, выполненные на основе накапливающих сумматоров. На вторые входы блока 22 коррекции траектории поступают из регистра 23 коррекции Значения коэффициентов деления Кх°и KY. Эти коэффициенты задают сжатие и при необходимости разворот в плоскости XOY траектории движения СГ (фиг.З), При этом
а cos (a -F/J)
KY
Ь - sin («+/)
где а угол, определяющий разворот библиотечной (исходной) траектории;
угол библиотечной траектории к оси ОХ(фиг.З);
а,Ь - коэффициенты сжатия траектории
а 1, b 1.
vTSr N мЬ
а,соЛа+/п+ |ш
0
5
0
5
0
5
При движении СГ по библиотечной траектории:
,
VK определяется из выражения D Fr™
VK
Nv
NQ
+
J N
Сигнал Дискретность D поступает с выхода регистра хранения 20 на второй вход ГТИ 14, Это позволяет реализовать экономию емкости блока 16 оперативной памяти и более гибко управлять движением СГ. Действительно, из выражения для VK видно, что величина D FrTi/i-const, т.е. при увеличе- Нии дискретности D, например с до 10 10 6м, частота Fr™ должна быть уменьшена также в 10 раз. .
Такая схема управления дискретностью шаговых двигателей во время движения СГ позволяет повысить качество формире а- ния петли за счет более точного прохождения инструмента по заданной траектории при экономии емкости используемой оперативной памяти в устройстве управления.
После прочтения из текущего номера кадра блока 16 оперативной памяти последовательно всей информации, т.е. после достижения двоичным кодом счетчика 18 адреса ячейки с адресом Хм (фиг.5), сварочная головка, пройдя по требуемой траектории движения с заданной точностью, и с заданными скоростями и ускорениями, попадает в необходимую точку и останавливается по сигналу KD (X,Y,Z). Этим же сигналом сообщается БХК 2 12 о конце перемещения. БЗК 2 12 записывает в счетчик 18 адреса начальный адрес новой страницы памяти блока 16 и выдает сигнал ПУСК в соответствии с алгоритмом (фиг.6). Цикл движения повторяется.
Таким образом, предлагаемая система числового программного управления координатными перемещениями при обработке изделий микроэлектроники за счет более точной аппроксимации заданных траекторий движения, хранения этой информации в библиотеке блока постоянной памяти, соответствующего выбора библиотечной траектории для конкретной перемычки, быстрой подготовки информации для движения СГ по новой траектории за счет совмещения времени перезаписи новой информации и движения СГ по траектории, а также за счет быстродействующей коррекции библиотечной траектории по данным, полученным из устройства технического зрения, позволяет повысить качество выполнения монтажа за счет повышения точности и повторяемости (стабильности) формирования проволочной петли при обеспечении высокой производительности сварочного процесса. .
Формула изобретения Система для автоматического числового управления координатными перемещениями при обработке изделий микроэлектрони ки, содержащая первый блок задания команд, блок оперативной памяти адресов, блок постоянной памяти программы, пульт управления, устройство технического зрения, второй блок задания команд, три шаговых двигателя, три датчика обратной связи механизма и три блока управления перемещения, в состав каждого из которых входят цифроаналоговый преобразователь, усилитель мощности, группа адресных выходов и выходов управления первого блока-задания . команд соединена соответственно с группами адресных входов и входов управления второго блока задания команд, блока оперативной памяти адресов, блока постоянной памяти программ-, пульта управления и устройства технического зрения, а вход-выход данных первого блока задания команд соединен с соответствующими входами-выходами данных вто-. рого блока задания команд, блока оперативной памяти адресов, пульта управления и устройства технического зрения, группа информационных вы- ходовблокапостоянной памяти программсоединена с группой информационных входов второго блока задания команд первый вход блока управления перемещениями соединен с выходом датчика обратной связи параметра, а выход с входом шагового двигателя, выход которого соединен с входом датчика обратной связи
параметра, выход усилителя мощности блока управления перемещениями является выходом блока и соединен с первым входом элемента управления демпфированием, вы- 5 ход которого соединен с управляющим входом цифроаналогового преобразователя, выход которого соединен с входом усилителя мощности блока управления перемещениями, первый и второй информационные
10 входы цифроаналогового преобразователя подключены соответственно к второму и третьему входам блока управления перемещениями, отличающаяся тем, что, с цельк} повышения точности позициониро5 вания и обеспечения высокой производительности процесса, введено устройство управления блоками управления перемещениями, группа информационных и адресных входов которых подключены к соответству0 ющим группам выходов второго блока задания команд, а вход управления - к выходу управления второго блока задания команд, первая, вторая и третья группы информационных выходов устройства управления,бло5 ками управления перемещениями подключены к группе информационных входов соответствующего блока управления пе- ремещениями, устройство управления содержит генератор тактовых импульсов,
0 таймер, делитель частоты, счетчик адреса, первый и второй коммутаторы, блок оперативной памяти команд, регистр хранения, блок преобразователей кода, блок коррекции, арбитр, регистр управления, регистр.
5 коррекции, выход генератора тактовых импульсов соединен с первым входом таймера, первый управляющий частотой вход генератора тактовых импульсов соединен с первым выходом регистра хранения, второй
0 управляющий пуском вход генератора тактовых импульсов соединен с выходом регистра управления, вторая группа входов 0 таймера соединена с первыми двунаправленными входами блока оперативной памя5 ти команд и регистра хранения и первого коммутатора, выход таймера соединен с входом делителя и с первым входом блока преобразователей кода, выход делителя соединен с первыми входами счетчика адреса
0 и арбитра, второй вход счетчика адреса соединен с вторыми двунаправленными входами первого коммутатора, первым двунаправленным входом регистра управления., первым входом регистра коррекции ...
5 и является вторым входом устройства управления, выход счетчика адреса соединен с первым входом второго коммутатора, второй вход которого соединен с первым входом арбитра, третий вход второго коммутатора соединен с вторым входом регистра управления, выход второго коммутатора соединен с вторым входом блока оперативной памяти команд, третий вход блока оперативной памяти команд соединен с вторым выходом арбитра, второй вход регистра хранения соединён с третьим выходом арбитра, второй выход регистра хранения соединен с входами блока преобразователей кода, третий выход разряда регистра хранения соединен с третьим входом регистра управления, первый выход блока преобразователей кода соединен с первыми входами блоков коррекции, группы входов которых соединены с соответствующими
разрядными выходами регистра коррекции, управляющий вход первого коммутатора соединен с четвертым выходом арбитра, второй вход арбитра соединен с четвертым входом регистра управления и управляющим входом устройства управления, первый и второй выходы блока коррекции и второй вход блока преобразователей кода являются соответственно первым, третьим и пятым выходами устройства управления, четвертый, пятый и шестой выходы разрядов регистра хранения являются соответственно вторым, четвертым и шестым выходами устройства управления.
УсГроисгбо
гех/люсхоге
jpeMsf
. Устройстве j/si/y rЈjreAtAt
1
Г П Г 1
фиг.1
Н исполнительным блокам
ьеэ9Ш
У IV
н е
frЈ99G8l
wrxv реум11
7W6/МСГйЗле&М
I
&$срико/ / екци# уюехто/HJveMfr & ye&/je/ etfw &
Ґлмю
ЦЩ,ЩЮУ##Ја
poucrtfftf/ №te Vftirt
JlMLJ
i
I
Jv
fowxtt иффM7±fA&fyy/1M&&
faeqte3/r
слерумхцеб
Пб0егя& ш/
| Двухкоординатное устройство для программного управления | 1984 |
|
SU1193644A2 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Транспортер | 1926 |
|
SU4060A1 |
| Минск | |||
