00
оо
tc
00
Изобретение относится к электротехнике и может быть использовано в шаговых электродвигателях.
Целью изобретения является уменьшение пульсаций тяговых усилий или моментов.
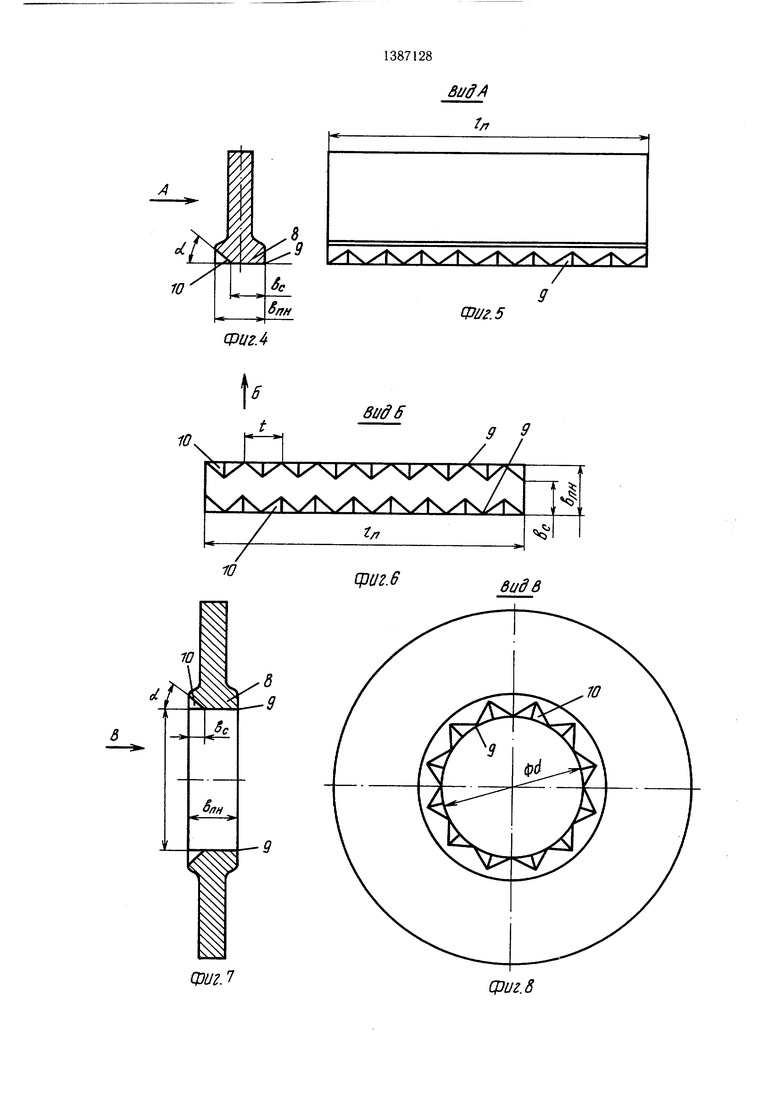
На фиг. 1 показан двухфазный линейный шаговый двигатель, продольный разрез; на фиг. 2 - двухфазный враш.ательный шаговый двигатель, поперечный разрез; на фиг. 3 - фрагмент активной зоны шагового двигателя; на фиг. 4 - магнитный полюс статора линейного двигателя, продольное сечение; на фиг. 5 - вид А на фиг. 4; на фиг. 6 - вид Б на фиг. 4; на фиг. 7 - магнитный полюс статора вращательного двигателя, поперечное сечение; на фиг. 8 - вид В на фиг. 7; на фиг. 9 - развертка в плоскость поверхности полюса статора врашательного двигателя по его расточке; на фиг. 10-13 - продольное симметричное сечение двигателя и принцип работы двухфазного электродвигателя на примере четырех его тактов смещения.
Шаговый электродвигатель содержит статор 1, состоящий из средних 2 и крайних 3 магнитных полюсов, между которыми размещена обмотка управления, состоящая из кату щек 4, и якорь 5, состоящий из магнитный цолюсов 6, между которыми размещены постоянные магниты 7, расположенные одноименными полюсами друг к другу. Полюса статора имеют полюсные наконечники 8, на внутренних кромках 9 которых выполнены под углом а к оси полюса вырезы 10 с одинаковым шагом t по длине I,, рабочей поверхности полюсного наконечника, при этом вырезы на противоположных кромках полюсного наконечника имеют смещение, равное t/2. Магнитные полюса и постоянные магниты якоря установлены на немагнитную трубу 11, а между статорами размещена немагнитная вставка 12.
Выполненные на полюсном наконечнике 8 вырезы 10 образуют зигзагообразную его форму, рабочая поверхность которого показана на фиг. 6 и 9 соответственно для линейного и вращательного двигателя, при этом ширина зигзагообразной рабочей поверхности равна be, которая получается больше, чем при выполнении скоса под уг- ломо(. .
Для всех двигателей выполняются соотношения: полюсное деление статора «i (фиг. 3) равно полюсному делению якоря ,, которое равно In + V осевой размер постоянного магнита 7 якоря 5, lq - осевой размер магнитного полюса 6 якоря 5; ширина полюсного наконечника среднего полюса 2 статора 1 равна Ь.„ 1„ ; единичный шаг смещения якоря щирина крайнего полюса 3 статора 1, равная б, меньше b и больше или равна Ь/2, где b - ширина среднего полюса 2 стато0
5
0
5
0
5
0
5
0
5
ра 1; расстояние междустаторной зоны а tc,; ширина немагнитной вставки 12 статора 1 равна а а-|-Ь-Ь н-2Ь-f n t, где п 0,1,2,3,...
Полюсность ферромагнитных полюсов статора определяется направлением токов в фазах статора (полюса обозначены соответственно символами N и S с индексами с - статор). Полюсность ферромагнитных полюсов якоря не зависит от направления токов фаз статора (полюса обозначены соответственно символами N и S с индексами а - якорь) остается неизменной и определяется намагниченностью постоянных магнитов, расположенных между ферромагнитными полюсами якоря.
На фиг. 10 показано положение якоря, соответствующее первому такту коммутации. Пусть направление токов в обеих фазах статора для этого случая совпадает. Будем считать это направление положительным. В момент времени, предшествующий этому положению (фиг. 10), якорь располагается со смешением влево (отрезок X-Х находится левее линии отсчета А-А). Для того случая полюса первой фазы будут расположены с некоторым смещением относительно полюсов якоря, причем каждая пара полюсов статора и якоря состоит из разноименных полюсов, сила притяжения которых приложена к якорю в направлении слева-направо.
Одновременно с этим, во второй фазе сбегающий (левый) край каждого полюса якоря расположен в районе действия одноименного с ним полюса статора, а набегаю- Ш,ий (правый) край каждого полюса якоря - в районе действия разноименного по отношению к нему полюса статора. Силы отталкивания сбегающих краев каждого полюса якоря и силы притяжения набегающих краев каждого полюса якоря действуют в одном направлении, совпадающим с действием сил на якорь со стороны первой фазы. Под действием этих сил якорь смещается вправо.
При достижении якорем положения магнитного равновесия первой фазы (отрезок X-Хо совмещается с линией отсчета А-А) изменяем направления тока в ней на противоположное, оставив неизменным направление тока второй фазы статора, так как здесь магнитного равновесия еще не наступило и силы продолжают действовать в направлении движения. Новое направление токов первой фазы статора обуславливает изменение полюсности статора этой фазы на противоположную (фиг. 11), при этом на сбегающий край каждого полюса якоря действуют отталкивающие силы, а на набегающий - притягивающие, но те и другие имеют одно направление (в сторону движения якоря).
OflHOBpeMerfHO с этим, во второй фазе статора каждая пара полюсов якоря и статора разноименная полюсности, магнитная сила притяжения которых также действует в направлении движения.
В результате действия сил обеих фаз якорь начинает смещаться вправо. При достижении магнитного равновесия второй фазы (фиг. 11) якорь перемещается на величину 2Х, - заверщается второй такт- коммутации.
При соверщении третьего такта коммутации для продолжения движения вправо необходимо изменить направление тока находящейся в магнитном равновесии второй фазы, оставив неизменным направление тока первой фазы (соответствующая этому случаю полюсность показана на фиг. 12). Третий такт коммутации заверщается, когда первая фаза устанавливается в положении магнитного равновесия (фиг. 12) с полюс- ностью, противоположной полюсности магнитного равновесия этой фазы первого такта. Якорь при этом смещается еще на один щаг Хо, т.е. на ЗХд.
Наконец, в четвертом такте коммутации необходимо изменить направление тока первой фазы, оставив неизменным направление тока второй фазы. На фиг. 13 показана полюсность, соответствующая этому случаю. Заверщается четвертый такт коммутации, когда якорь перемещается еще на один щаг Хо и вторая фаза оказывается в положении магнитного равновесия с полюсностью, противоположной полюсности магнитного равновесия этой фазы второго такта (фиг. 13). Таким образом, за четыре коммутации якорь смещается на величину четырех щагов 4Ху.
Для сохранения неизменным направления движения якоря, как видно в каждой из фаз необходимо поочередно изменять полярность питающего напряжения (разнопо- лярная коммутация).
Аналогично протекают процессы и при движении якоря влево. Для получения реверса достаточно поменять полярность включений одной из фаз, не из.меняя оче
редности коммутации фаз.
Выполнение вырезов на полюсно.м наконечнике статора и образование при этом зигзагообразной формы рабочих его поверхности обеспечивает плавные изменения вза имной магнитной проводимости между полюсами статора и якоря при его смещении, что улучщает форму характеристики момента или тягового усилия, т.е. уменьщает пульсацию тягового усилия или момента.
Выполнение вырезов на полюсном нако5 нечнике статора и образование при этом зигзагообразной формы его поверхности обеспечивает плавное изменение взаимной магнитной проводимости между полюсами статора и якоря при его смещении, что улучQ щает форму характеристики тягового усилия или момента, т.е. уменьщает пульсацию тягового усилия или момента.
Формула изобретения
5 Шаговый электродвигатель, содержащий статор, состоящий из магнитных полюсов, между которыми размещена обмотка управления, и якорь, состоящий из магнитных полюсов, между которыми размещены посQ тоянные магниты, расположенные одноименными полюсами друг к другу, отличающийся тем, что, с целью уменьщения пульсаций тяговых усилий или моментов, магнитные полюса статора имеют полюсные наконечники, на внутренних кромках которых выполнены
5 под углом к оси полюса вырезы с одинаковым щагом по длине рабочей поверхности полюсного наконечника, при этом вырезы на противоположных кромках полюсного наконечника имеют смещение, равное половине щага.
10
w

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для экспериментальных исследований гидравлических движителей | 1988 |
|
SU1615589A1 |
| Однофазный вентильный торцовый двигатель | 1990 |
|
SU1742952A1 |
| Устройство для дуговой сварки с поперечными колебаниями сварочной горелки | 1983 |
|
SU1133059A1 |
| Линейный синхронный электродвигатель | 1985 |
|
SU1350779A1 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| СТАТОР ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПОСТОЯННОГО ТОКА С ПОСТОЯННЫМИ МАГНИТАМИ | 2023 |
|
RU2820845C1 |
| Шаговый электродвигатель | 1980 |
|
SU930516A1 |
| ЭЛЕКТРОТЕХНИЧЕСКИЙ КОМПЛЕКС ПОРШНЕВОГО КОМПРЕССОРА НА ОСНОВЕ ЛИНЕЙНОЙ МАГНИТОЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2019 |
|
RU2720882C1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2436221C1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МОДУЛИРОВАННОЙ МДС ЯКОРЯ | 2009 |
|
RU2414792C1 |


Изобретение относится к электротехнике и может быть использовано в шаговом электроприводе. Цель - улучшение тяговых характеристик за счет уменьшения пульсаций. Шаговой электродвигатель содержит статор 1, имеющий обмотки 4 возбуждения, ферромагнитные полюса 2, 3 и якорь 5, со- стояш,ий из постоянных магнитов 7 одинаковой в направлении движения длины, обращенных друг к другу одноименными полюсами. Якорь 5 снабжен ферромагнитными полюсами 6, разделяющими постоянные магниты 7, длина которых равна щирине полюсного наконечника 8 статора 1, имеющего на своей торцовой поверхности вырезы 10 для обеспечения ему зигзагообразной формы в направлении движения якоря. 13 ил. i (Л
CPU г. г
W
Сриг.З
12
10
10
9 9
&
8с
6,
/7/У
-9
фиг. 7
ери г. 6
виде
фиг. 8
t
с
А
I фаза
фиг. 12
Составитель В. Цуканов
Редактор Г. ВолковаТехред И. ВересКорректор Н. Король
Заказ 1226/54Тираж 665Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственио-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Ю 10
vj
CPU г. 9
2 фоза
| Линейный электрический двигатель | 1973 |
|
SU511656A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линейный реверсивный шаговый электродвигатель | 1960 |
|
SU131396A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
