22
К)
Изобретение относится к электроэнергетической и теплоэнергетической технике и может быть применено для регулирования скорости вращения мощных электрогенераторов и давления пара или расхода топлива в котлоаг- регатах.
Целью изобретения является повышение точности и быстродействия регулятора.
На чертеже представлена функцио- нальная схема предлагаемого регулятора.
Регулятор содержит первый, второй и третий источники 1-3 постоянных сигналов, первый, девятьй, второй,, третий, четвертый,, восьмой, десятый одиннадцатый, пятый,, шестой и седьмой усилители 4-14, первый, второй и третий сумматоры 15-17, дифферен циатор 18, исполнительный механизм 19, инерционное звено 20, блок 21 деления, вход и вьгход регулятора 22 и 23.
Регулятор работает следующим образом
Входной сигнал регулятора поступает на информационные входы четвертого, второго и десятого усилителей 8, 6 и 10 и на первые входы пятого, шестого и седьмого усилителей 12-14. На.вторые входы пятого, шестого и седьмого усилителей 12-14 поступают сигналы с выходов первого, второго и третьего источников 1-3 постоянных сигналов, которые определяют рациональные значения параметров регулятора. С выходов первого, второго и ;третьего усилителей 12-14 сигналы I подаются на управляющие входы четвертого, второго, третьего, восьмого и десятого усилителей 6,7,8,9и 10,, которые и устанавливают целесообразные параметры регулятора, а именно коэффициент усиления и постоянные времени интегрирования и дифференцирования регулятора., С выхода четвертого усилителя 8 сигнал через третий сумматор 17 подается на информационный вход восьмого усилителя 9, охваченного отрицательной обратной связью через дезятый усилитель 5. С выхода десятого усилителя 10 сигнал подается на вход Делимое блока 21 деления, на вход Делитель которого подается снгнгш с выхода второго усилителя 6. С выхода восьмо го усилителя 9 сигнал подается на
информа1щонкый выход одиннадцатого усилителя 11, на управляющий вход которого сигнал подается с выхода блока 21 деления. С выхода одиннадцатого усилителя 11 сигнал подается на дифференциатор 18, с выхода которого сигнал через первый сумматор 15 поступает на вход первого усилиg теля 4, охваченного обратной связью через инерционное звено 20 За счет большого коэффициента усиления первого усилр теля 4 в регуляторе формируется форсирующее звено, С выхода
форсирующего звена, т.е. с выхода первого усилителя 4 сигнал поступает на первый вход второго сумматора 16, на второй и третий входы которого одновременно поступают сигналы .
0 с выходов второго и третьего усилителей 6 и 7, Таким образом, сигнал на выходе второго сумматора 16 пропорционален входному сигналу регулятора, его первой и второй произ5 водной, С выхода сумматора 16 сигнал подается на вход исполнительного механизма 19.
Коэффициент усиления усилителя 8 меняется пропорционально выходному
0 сигналу усилителя 125 коэффициент усиления усилителя 6 меняется пропорционально выходному сигналу усилителя 14, коэффициент усилителей 7,9 и 10 изменяются пропорционально выходному сигналу усилителя 13, а ко- эффициент усиления усилителя 11 меняется пропорционально выходному сигналу блока 21 деления.
Известно, что передаточная функция ПИД-регулятора имеет вид
0
W,(p) Кр(1 -ь ТрР+ -V 1
Ч
Т.Р
где К р- коэффициент усиления регу- лятора;
Т - постоянная времени интегрирования регулятора} Т - постоянная времени дифференцирования регулятора; р - оператор Лапласа;.
или при переменных параметрах имеет вид:
55
и.р)-К,(к),)Л«.хШ5)Л
(Л
Передаточные функции элементов регулятора имеют вид
313888244
Wg(p) Kg(x); (p) WgCp) KgCx); ) к,(х);
w (p) к ; WgoCp) w,g(p) Wg(p) к (x);(3)
20 19 P
WgCp) w, (p) (x); w (p) K, (x) w,j, (p) у
где W-(p), Kj (x) и T-- - соответствен- спедующей, В дальнейшем будем исполь- .но передаточная функция, коэффициент зовать представление об эквивалент- усиления и постоянная времени i-ro 10 ной передаточной функции и аргумент

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство с размытой логической самоорганизацией для автоматического управления объектом,например ректификационной колонной | 1986 |
|
SU1434402A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2015 |
|
RU2593735C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2014 |
|
RU2577204C2 |
| Электрогидравлический следящий привод робота | 1989 |
|
SU1723360A1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА НАГРУЗКИ САМОЛЕТА | 2003 |
|
RU2260179C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2017 |
|
RU2688448C1 |
| Электрогидравлический следящий привод робота | 1990 |
|
SU1740806A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2006 |
|
RU2312006C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2010 |
|
RU2443542C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2007 |
|
RU2355563C2 |
Изобретение относится к области электроэнергетической и теплотехнической техники, может - быть использовано для регулирования скорости вращения мощных электрогенераторов и давления пара или расхода топлива в котлоагрегатах и является усовершенствованием известного регулятора по авт.св. № 857925. Целью настоящего изобретения является повышение точности и быстродействия регулятора, Поставленная цель достигается за счет того, что входной сигнал регулятора усиливается в усилителе 8, поступает на первый вход сумматора 17, выходной сигнал которого усиливается в усилителе 9, с выхода которого поступает на информационный вход усилителя 11 и через усилитель 5 на второй вход сумматора 17. Выходной сигнал усилителя 11 дифференцируется в дифференциаторе 18 и поступает через сумматор 15 и усили- тель 4 на первый вход сумматора 16, а через усилитель 7 на второй вход сумматора 16, на третий вход которого подается входной сигнал регулятора , усиленный в усилителе 6. Выходной сигнал усилителя 4 подается через инерционное звено 20 на второй вход сумматора 15. Выходной сигнал сумматора 16 подается на вход исполнительного механизма 19. Выходной сигнал усилителя 6 делится, в делителе 21 на усиленный в усилителе 10 входной сигнал регулятора, а результат деления подается на управлянщий вход усилителя 11« Входной сигнал рег улятора сравнивается в усилителях 5,6,7 с выходными сигналами источников постоянных сигналов 1,2,3. Коэффициент усиления усилителя 8 меняется в зависимости от вькодного сигнала усилителя 12, коэффициент усиления усилителя 6 меряется в зависимости от выходного сигнала усилителя 14, а коэффициенты-усиления усилителей 7,9 и 10 меняются в зависимости от выходного сигнала усилителя 13. 1 ил. (Л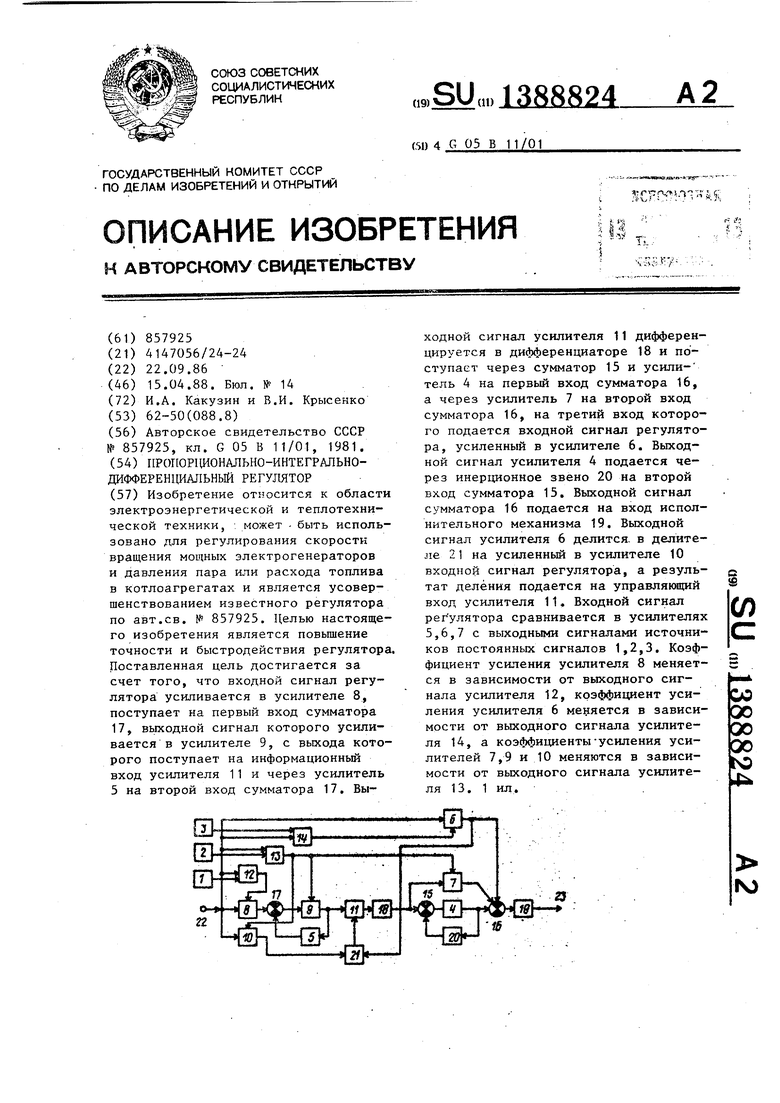
блока регулятора.
Передаточная функция регулятора, исходя из составляющих (3), будет
-, Шт . uifK; 1; .Р) кД, . .«l.|bS.l . .,.i
f
7 2.0
Поскольку передаточные функции / (2) и (5) равны, то
Т Т Т -Т 5a.-iS. I-2C S . « 8 )
Отсюда определяем Т
т Ч
19
19
,„TIO
1+К., К
Вследствие этого независимое парметрическое изменение параметров регулятора осуществляется с помощью второго усилителя 6, усилителя 8 и третьего усилителя 7,
Благодаря дополнительному введению в регулятор восьми усилителей, трех источников постоянных сигналов и блока деления достигается возможность независимого изменения значе- ний трек основных параметров регулятора, коэффициента 9силения и постоянных времени дифференцирования и интегрирования, что позволит осущесвлять поднастройку параметров регулятора к параметрам объекта регули- рования с переменными динамическими характеристиками и не выпускать в пр.омьшшенности целый типоразмерный ряд свьше 20 ШВД-регуляторов с разными параметрами, а ограничиться их минимальным числом примерно 3-5, крме того повысить точность и быстродействие регулятора, т.е. повысить качество процессов регулирования, а также уменьшить капитальные затраты на проектирование и расширить облас применения регулятора на другие области техники.
X параметров Kg,K,K,K, и т.д. будем опускать.
Т п
(4)
(5)
7 2.0
(6)
Формула изобретения
Иропорционально-интегрально-диф- ференциальный регулятор по авт.св. № 857925, отличающийся тем, что, с целью повыше- . ния точности и быстродействия регулятора, в нем дополнительно установлены с четвертого по одиннадцатый усилители, блок деления, третий сумматор и первый, второй и третий ис-. точники постоянных сигналов, причем вход регулятора соединен с входом дифференциатора через последовательно соединенные четвертый усилитель, первый вход-выход третьего сумматора, восьмой и одиннадцатый усилители, и кроме того, вход регулятора подключен к информационному входу десятого усилителями к первым входам пятого, шестого и седьмого усилителей; соединенных вторыми входами с выходами соответственно первого, второго и третьего источников постоянных сигналов, выходы пятого и седьмого усилителей подключены к управляющим входам соответственно четвертого и второго усилителей, выход шестого усилителя соединен с управляющими входами третьего, восьмЬго и десятого усилителей, вход и выход девятого усилителя подключены соответственно, к выходу восьмого усилителя и к вхо513888246
ду третьего сумматора, входы Дели-- ходами четвертого и второго усили- мое и Делитель и выход блока де- телей и управляющим входом одиннад- ления соединены соответственно, с вы- цатого уси-пителя.
| Пропорционально-интегрально-дифференциальный регулятор | 1979 |
|
SU857925A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
