(54) ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Пропорционально-интегрально-дифференциалный регулятор | 1986 |
|
SU1388824A2 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| Многофункциональный регулятор | 1986 |
|
SU1432455A1 |
| Устройство для автоматического управления вакуумным деаэратором | 1990 |
|
SU1817823A3 |
| Самонастраивающийся регулятор | 1980 |
|
SU940130A1 |
| СУПЕРВИЗОРНЫЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2157558C1 |
| Система управления | 1979 |
|
SU842703A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАГРУЗКИ КОТЛА С ПЫЛЕСИСТЕМАМИ ПРЯМОГО ВДУВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419746C2 |
| Устройство для регулирования температуры | 1981 |
|
SU999029A1 |
| Программный регулятор температуры | 1988 |
|
SU1594500A1 |
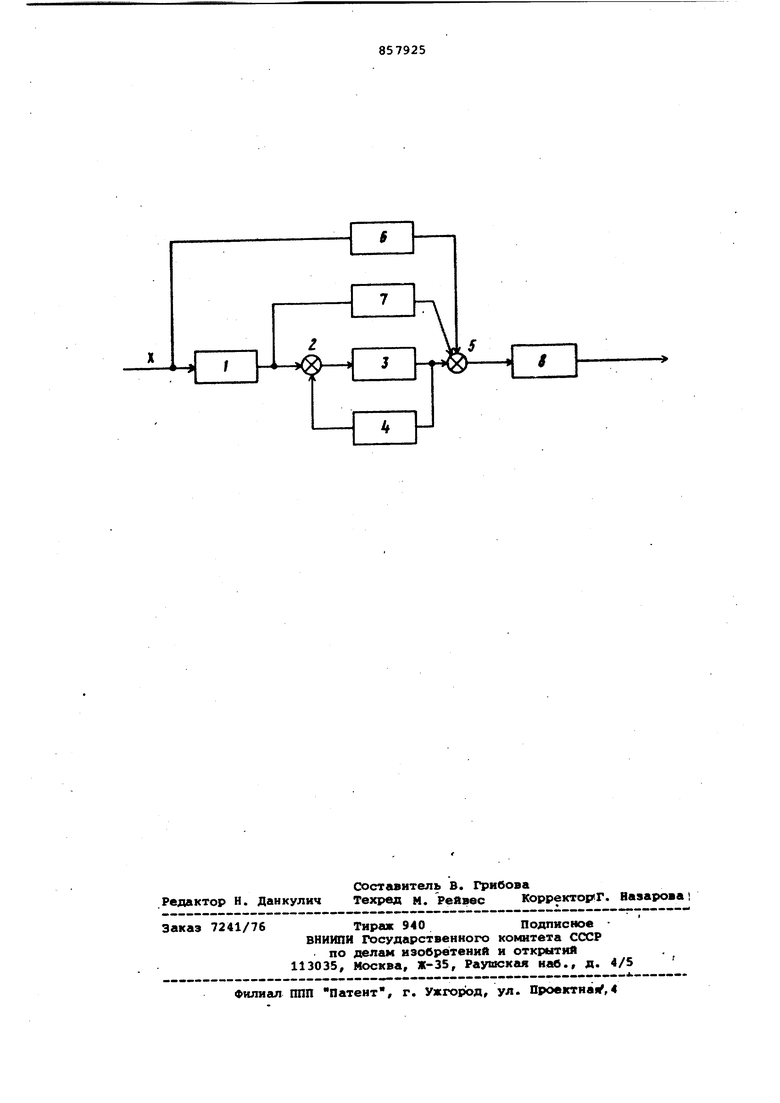
Изобретение относится к автоматйческому регулировангео и управлекию и мэжет &ыть использовано при создании систем регулировання теплоэнергетическими процессакт, а также в хи мической и металлургической отраслях прокыишенности. Известны промьвапеиные пропО1 цнонально-интегрально-дифференциальныерегуляторы (ПИД), широко используекые для рех лирования различных технологических процессов. Эти регуляторы позволяют создавать иадежиые системы автоматического регулировани позволяюате обеспечить заданное качество регулирования 1 . Наиболее близким к предпагаемаму по технической сущности является ПИД-регулятор, содержгш ий параишельно соединенные усилитель и JEQfффepeн циатор, Btixo bi KOTO pux поя&аа на сум матор, ооелнненнкЛ после;к вательно с другим сулвватором, усилктелетч, охваченным инерционным звеном по зако отрицательной обратной связи и исполнительшын механизмом в В1зде. интегрирующего эвена izj . Недостаток известного регулятора ограниченный диапазон настройки вре мени, предварения, определяемой параметром d Макси1 альное з начение этого параметра равно 0,25. В то же время оптимальная величина d, как правило, превышает это значение. Нгшример, Г -d-onT может быть рав-. 1ШМ 2/2. Цель изобретения - расширение диа пазона настройки времени предварения Те- ПНД-регулятора. Поставленная цель достигается тем, что в ПМД-регулятор, соде{ жащий последовательно соединенные дифференциатор, первый сумкатор, nepBiA усилитель и ииеЕщиониое звено, выходом подключенное к второму входу первого сумчатора, и исполнительгалй механизм, введены два усилителя и второй сумматор, входы которого подключены к выходгш усилителей, а выход - к входу исполнительного механизма,причем ъхомл второго и третьего усилителей подключены соответственно к входу и дифференциатора. На чертеже представлена схема предлагс мого регулятора. Регулятор содержит дифференциатор 1, последовательно соединенный с сумматором 2, усилителем 3, охваченным отрицательной обратной связью в виде инерционного звена 4, сумматором 5, на вход которого подключены выходы усилителей 6 и 7, а их входы соединены с входом и выходом дифференциатора 1, а также с исполнительным механизмом 8. . Система работает следуквцим образом. Входной сигнал X поступает на дифференциатор 1, с выхода которого сигнал через сумматор 2 поступает на вход усилителя 3, охваченного обратной связью 4. За счет болыпого коэффициента усиления усилителя 3 здесь формируется форсирующее звено С выхода форсирующего звеНа, т.е. с выхода усилителя 3, сигнал поступает на вход сумматора 5. На суммат 5 одновременно поступают сигнешы с входа регулятора и выхода дифференциатора 1 усилители 6 и 7.Таким образом, сигнал на выходе сумматора 5 пропорционален входному сигналу, его первой и второй производной. Поскольку параметры усилителей 3,6 и 7 можно выбирать произвольно, можно произвольно устанавли вать и коэффициенты при первой и второй производной входного сигнала т.е. можно обеспечить любое значени d Tg./Tu . Известно, что передаточная функция ПИД-регулятора , W(p) и частотная функция JVS - , (2) Объекты теплоэнергетики, химичес кой и металлургической промышленнос ти весьма инерционны и, следовательно, низкочастотны. Следовательно значения частоты рабочем диапазоне (а это второй и третий квадрат комплексной плоскости для ПИ -регулятора) будут малы (например, UJ 0,015-0,05). Если величина То- мала, значение Tg-cf i в выражении (2) также МЕШО и им npa тически можно пренебречь. Расширение диапазона Т приво-. . дит к практическому использованию ПИД-регулятора, а следовательно, к улучшению качества регулирования (сокращению времени регулирования, уменьшению колебательности). Для расчета Т используют существу1рщую методику расчета, по которо задаются значения d (его принимают обычно равным предельному значению , для данного типа регулятора эт величина.указывается в паспорте регулятора) и из условия обеспечения требуемого качества регулирования находят Кр.Тц а затем Т. Преобразуем передаточную функцию (1) к виду W(p)---|( iLbiilVJ i Р Передаточная функция регулятора (,,) « и k, коэффициентыусиления блоков 6,7,4 и 3; постоянные времени блоков 1,4,8„ Поскольку передаточные функции (3) и (4) равны, 7T-.TiI, Т . . /о иу 1( и V.1f- Из уравнений (5) следует расчетт т - bilk.- Т- rf - f - Коэффициенты, входящие в ура:вне- ние (6), независимы и значение т всегда можно установить требуемое (любое), выбрав соответствующие ; , Использование предлагаемого регулятора позволяет расширить диапазон его настройки за счет использования дополнительных усилителей и сумматора и, следовательно, повысить Запас устойчивости систем, сократить, время регулирования. формула изобретения Пропорционально-интегрально-диф-; ференциальный регулятор, содержащий последовательно соединенные дифференциатор, первый сумматор, первый усилитель и инерционное звено, выходом подключенное к второму входу ,. первого сумматора и исполнительный механизм, отличающийся тем, что, с целью расширения диапазона настройки регулятора, в него введены два усилителя и второй сумматор, входы которого подключены к выходам усилителей, а выход - к входу исполнительного механизма, причем входа второго и третьего усилителей подключены соответственно 1 входу и выходу дифференциатора. Источники информации, принятые во внимание при экспертизе 1.Ротач В.Я. Расчет динамики промышленных автоматических систем регулирования.М., Энергия, 1973, с. 34, 198, 422. 2.Штейнберг Ш.Е. и др. Прокклаленные автоматические регуляторы. М., Энергия, 1973, с. 31-21 (прототип).
