О ЈL ITLUlIJ L4J1
| название | год | авторы | номер документа |
|---|---|---|---|
| Хлопкоуборочный аппарат | 1990 |
|
SU1753996A2 |
| ХЛОПКОУБОРОЧНЫЙ АППАРАТ | 2005 |
|
RU2300186C2 |
| Рабочий орган для уборки хлопка с кустов хлопчатника | 1985 |
|
SU1335169A1 |
| Хлопкоуборочный аппарат | 1990 |
|
SU1789111A1 |
| Хлопкоуборочный аппарат | 1982 |
|
SU1127540A1 |
| Рабочий орган хлопкоуборочного аппарата | 1986 |
|
SU1491387A1 |
| Устройство для уборки хлопка | 1982 |
|
SU1117006A1 |
| Хлопкоуборочный аппарат | 1982 |
|
SU1107783A1 |
| Хлопкоуборочный аппарат | 1977 |
|
SU735208A1 |
| Барабан хлопкоуборочного аппарата | 1980 |
|
SU967365A2 |
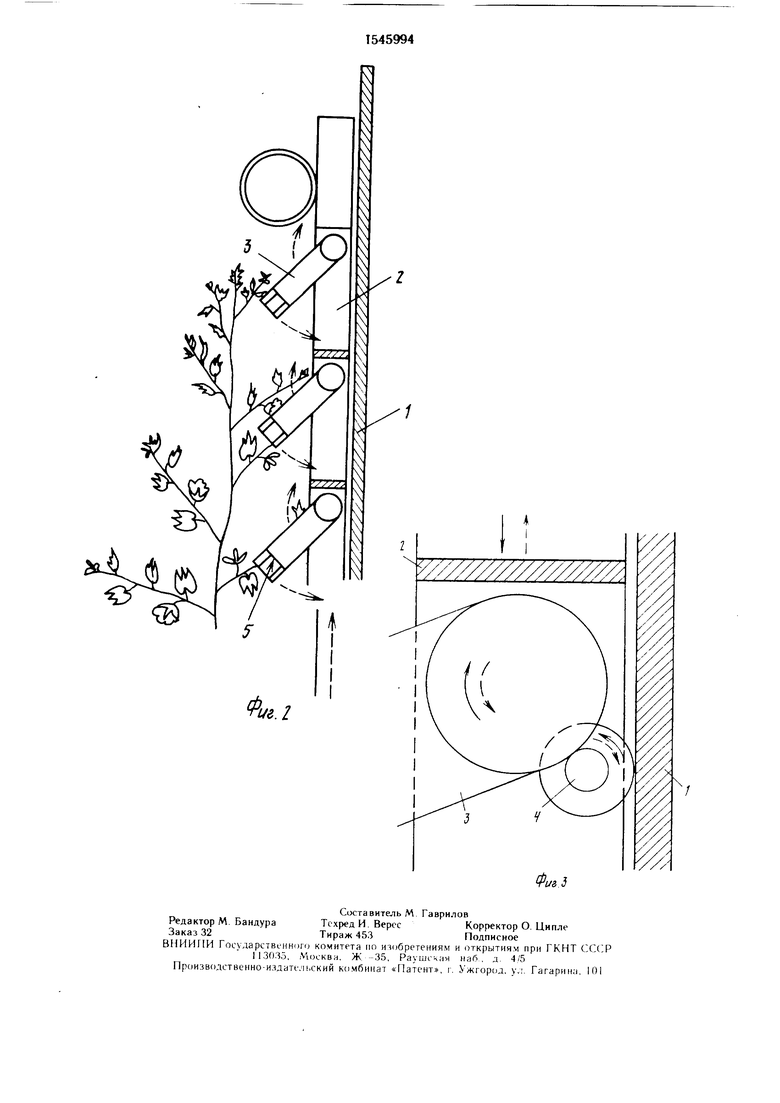
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в хлопкоуборочных машинах. Цель изобретения - повышение эффективности работы. В хлопкоуборочном аппарате держатель 2 выполнен с возможностью возвратно-поступательного перемещения в вертикальной плоскости и на нем смонтированы рабочие органы 3, каждый из которых состоит из полого корпуса, один конец которого шарнирно связан с держателем 2 с возможностью поворота в вертикальной плоскости, а на свободном конце 5 на внутренней поверхности боковой стенки смонтирован хлопкозацеп 6 с наклонными зубьями 7. Напротив хлопкозацепа 6 установлен съемник 8. При возвратно-поступательном движении держателя 2 рабочий орган 3 совершает колебательное движение, при этом его свободный конец 5 проходит между ветвей хлопчатника и захватывает раскрывшиеся коробочки своей рабочей полостью. Хлопкозацеп 6 зубьями 7 прокалывает волокно, отталкивая ветки, листья и незрелые коробочки. Совершая возвратно-поступательное движение вдоль полости рабочего органа, хлопкозацеп перемещает волокно к съемнику 8, который за счет своего плоскопараллельного движения снимает волокно с хлопкозацепа 6 и перемещает его внутрь аппарата. 4 ил.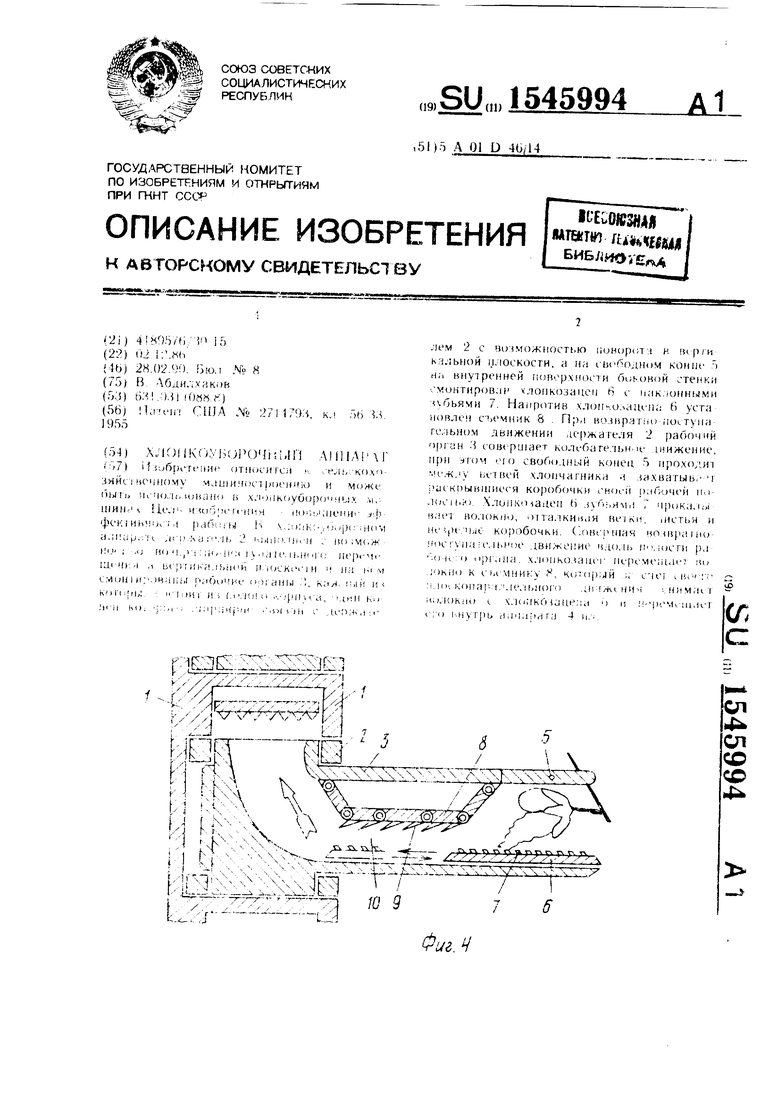
/
i ;/ iff ,-,-, .-r-v---T. i x/i
П uA
t- -. Y-s Lj f t4 l-.
i
N - J ZZZ jNTTTWrTT:: :
;П r / T
; -;%---П
L
V
СЛ
4 СЛ
CO CO 4
Изобретение относится к сельскохозяйст венному машиностроению и может быть использовано в хлопкоуборочных машинах.
Цель изобретения - повышение эффективности работы аппарата.
На фиг. 1 показан хлопкоуборочный аппарат, вид сверху; на фиг. 2 - то же, вид сзади; на фиг. 3 - схема привода рабочего органа; на фиг. 4 - рабочий орган, продольное сечение.
Хлопкоуборочный аппарат содержит корпус 1, в котором установлены держатели 2 с рабочими органами 3, один конец каждого из которых подвижно соединен с корпусом 1 посредством двойного зубчатого колеса 4, а на свободном конце 5 на внутренней поверхности боковой стенки смонтирован хлопкозацеп 6 с зубьями 7, а на про тивоположной стенке смонтирован съемник 8 с зубьями 9. Хлопкозацеп 6 и съемник 8 образуют зубчатую щель 10.
Аппарат работает следующим образом.
При перемещении вдоль рядка хлопчатника держатели 2 совершают возвратно-поступательное движение в вертикальной плоскости, которое посредством зубчатого колеса 4 передается рабочему органу 3, который совершает колебательное движение из вертикального положения в горизонтальное и обратно. При этом свободные концы 5 рабочих органов проходят между ветвей кустов хлопчатника, захватывая зубчатой щелью 10 раскрывшиеся спелые коробочки. Хлопкозацеп 6, совершая возвратно-поступательное движение вдоль полости рабочего органа, захватывает зубьями 7 волокно хлопка я перемещает сто внутри ьемник 8, совершая плоскопараллельное движение, захватывает зубьями 9 Р .точно и обеспечивает ei о дальнейшее продвижеп. внутрь аппарата За один цикл рабочего органа 3 члопко
+
ш
77////////////////////////////
зацеп 6 совершает несколько возвратно-поступательных движений. Благодаря свободному расположению коробочек в рабочей щели хлопкозацеп зацепляет только волокно раскрывшихся коробочек, отталкивая более жесткие предметы (незрелые коробочки, ветки, листья), за счет чего снижается травмирование кустов хлопчатника и повышается качество собранного волокна.
Перемещение хлопкового волокна только в одном направлении в зубчатой щели 10 предотвращает выпадение собранного хлопка, снижая тем самым его потери.
Формула изобретения
0
0
5
Хлопкоуборочный аппарат, содержащий корпус, в котором установлены держатели с рабочими органами и приводными элементами, и съемники, отличающийся тем, что, с целью повышения эффективности работы, каждый держатель выполнен с возможностью возвратно-поступательного перемещения в вертикальной плоскости и на нем смонтированы рабочие органы, каждый из которых состоит из полого корпуса, один 5 конец которого шарнирно связан держателем с возможностью поворота в вертикальной плоскости, а на свободном конце на внутренней поверхности боковой стенки смонтирован с возможностью возвратно-поступательного движения вдоль корпуса хлопкозацеп в виде пластины с наклонными зубьями, направленными внутрь рабочего органа, при этом на противоположной боковой стенке полости корпуса рабочего органа установлен с возможностью плоскопарал лельного перемещения относительно хлопко- зацепа с ьемник, выполненный в виде пластины с зубьями, также направленными внутрь рабочего органа.
ФмЗ
