оо со
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления мощностью привода аппарата непрерывного размола | 1982 |
|
SU1063459A1 |
| Способ автоматического управления процессом непрерывного размола смеси волокнистых компонентов | 1987 |
|
SU1416581A1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ УРОВНЯ ЗАПОЛНЕНИЯ МЕЛЬНИЦЫ | 2007 |
|
RU2440849C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗМЕЛЬЧЕНИЯ МАТЕРИАЛОВ В МЕЛЬНИЧНОМ АГРЕГАТЕ | 2006 |
|
RU2300798C1 |
| Способ автоматического управления процессом разлома бумажной массы,состоящей из нескольких волокнистых компонентов | 1987 |
|
SU1430437A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ПРИВОДОВ КОНИЧЕСКИХ МЕЛЬНИЦ | 1973 |
|
SU379712A1 |
| Автомат присадки ротора конической мельницы | 1973 |
|
SU469485A1 |
| Устройство для автоматического регулирования степени помола бумажной массы | 1981 |
|
SU988942A1 |
| Способ управления процессом размола бумажной массы в аппарате непрерывного размола с внешней рециркуляцией массы | 1984 |
|
SU1196433A1 |
| Система автоматического управления процессом размола бумажной массы на дисковой мельнице | 1983 |
|
SU1238023A1 |
Изобретение относится к устройствам управления дисковыми мельницами, используемыми для размола волокнисты.х материалов. Цель изобретения - повьпиение динамической устойчивости упран,1ения MOHL- ностью приводного двигате.т дисковой ме. 1ь- ницы. Эта цель достигается тем, что вшмен функциональный преобразовате.дь )ч ной характеристики, который включен н ж.1 выходом блока измерения мощности и входом блока управления ме.ханизмом присадки Задачей функционального преобразователя нагрузочной характеристики является выпрямление нагрузочной характеристики мельницы, которая определяется зависимостью мощности приводного двигателя от зазора между дисками, т. е. .V /((| i. Введенный преобразователь обеспечивает подачу в лятор мощности линейно изменяюпкм осн сигнала .V, тем самым доспи1ается постоянная добротность контура i нелинейность нагрузочной 2 ил. компенсируется характеристики. (/. С
О со
Изобретение относится к устройствам управления дисковыми мельницами, используемыми в целлюлозно-бумажной промышленности для размола волокнистых материалов, из которых производится бумага или картон.
Цель изобретения - повышение динамической устойчивости управления мощностью приводного двигателя дисковой мельницы.
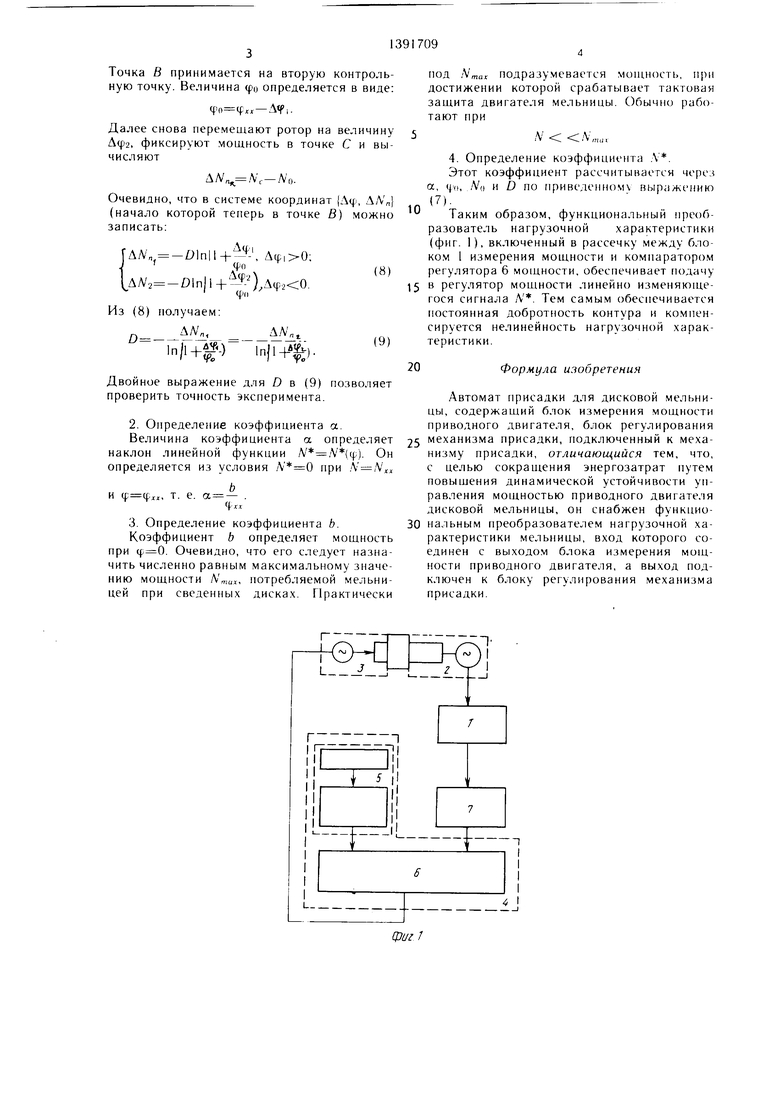
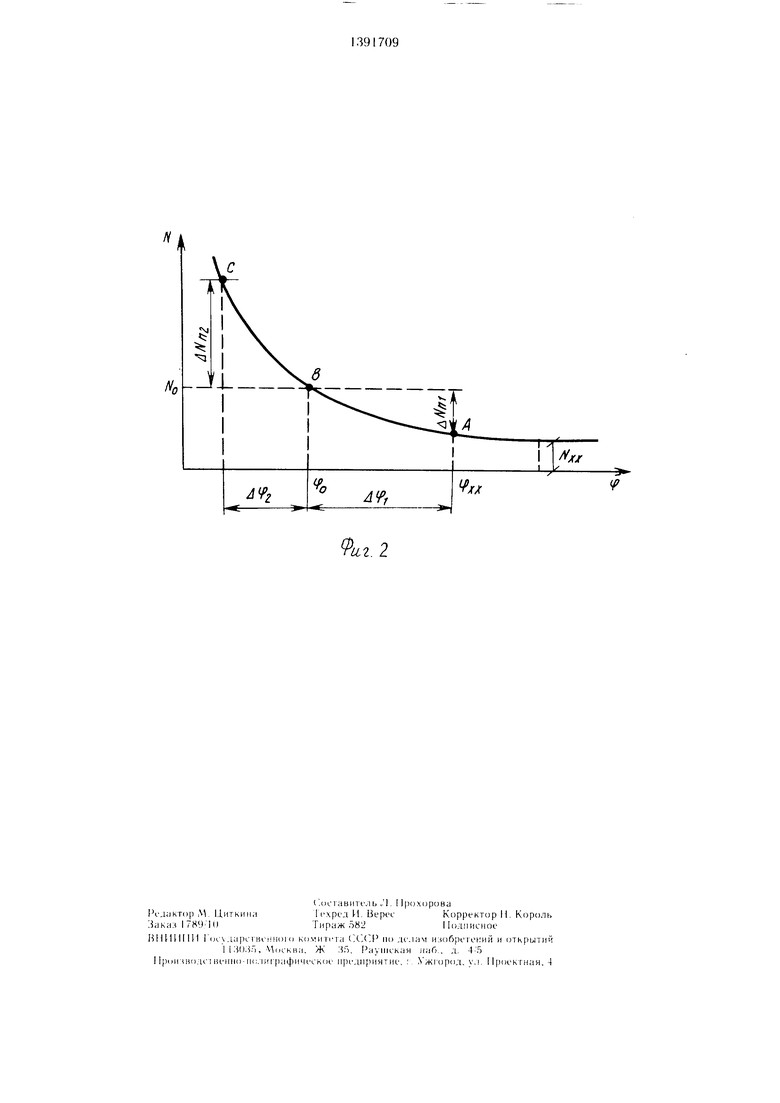
На фиг. 1 представлена структурная схема автомата для дисковой мельницы; на фиг. 2 - нагрузочная характеристика мельницы.
Автомат присадки для дисковой мельницы включает в себя блок 1 измерения мощности, который является типовым и входит в состав электрических принципиальных схем для дисковых мельниц, дисковую мельницу 2, механизм 3 присадки, блок 4 регулирования .механизма присадки, включающий задатчик 5 мощности приводного двигателя, и регулятор 6 мощности с компаратором, функциональный преобразователь 7 нагрузочной характеристики. Если использовать, например, микропроцессорный регулирующий контроллер (ремиконт) серии Р-110, то автомат присадки совместно с блоком 7 может быть выполнен так, как представлено на фиг. I.
Блок 7 выпря.мляет нагрузочную характеристику мельницы. При этом необходимо, чтобы сигнал Л функционального преобразователя 7 нагрузочной характеристики, вводимый в регулятор 6 мощности, блок 4 регулировки механизма присадки, при изменении зазора (( менялся бы линейно в отличие от сигнала Л дисковой мельницы 2, который нелинейно связан с ф.
Зависимость (cf), показанная на фиг. 2, может быть аппроксимирована уравнением вида
;V -Deii + ,Vo,(1)
то
где D - коэффициент;
q - текущее значение рабочего зазора;
«Ри - зазор, соответствующий заданной мощности Л о;
Л о- заданное значение мощности приводного двигателя.
Чтобы фазировка сигналов в схеме АП не была нарушена (т. е. чтобы при уменьшении ф мощность /V уменьшилась и наоборот) необходимо найти линейный закон изменения сигнала М при изменении ф и, соответственно, Л . Такой закон может быть записан в виде
(,)Л (Л )/(ф),(2)
где Ь, а - неизвестные параметры;
)-неизвестная функция.
Прямое использование зависимости (2) потребовало бы установки на мельнице датчика положения диска, что усложнило бы
конструкцию механизма присадки. Обойти эту техническую сложность можно, если установить связь ф с измеряемой мощностью
Л , Из уравнения (1), если --|-,Vo,
Vo
ToDln|- 1п (о-Л ); 1пф L/
10
ffViffi- Xo
4f
1пфо-((. о-;V), И получаем
.. ..ег. X
15
е- .(3)
Теперь из уравнения (2) находим неизвестную ранее функцию F(N) (заметим, что
ДФ)Л ):
20 /..(Л)n2т .. /(ф) -0(1пфо + - .о)+.;
v/D
- v
(4)
Последовательное включение звеньев 1 и 7 приводит к окончательному уравнению функционального преобразователя нагрузочной характеристики
)
F()b - a. .е(5)
0 Функция F(N) является нелинейной по отнощению к yV, но, учитывая нелинейность /V по отношению к ф, функция F() будет линейна по отношению к ф, т. е.
;V fe -аф.(6)
5 Поскольку величина е является постоянной, то уравнение функционального преобразователя нагрузочной характеристики можно записать в виде
. /,р.е ,(7)
где постоянный коэффициент.
Остановимся теперь на методике определения всех параметров, входящих в уравнение (7).
5 1. Определение коэффициента D.
На работающей мельнице отсаживают ротор до того момента, когда УУ перестает уменьшаться, т. к. когда полезная мощность размола равна нулю, потребляемая мощность Л равна мощности потерь Л (точка А
0 на фиг. 2). Эта точка принимается за исходную. Затем включают механизм присадок на время t. За это время диск переводится в зону рабочих зазоров на величину Лф| 1 V, где I -- скорость механизма присадок, мм/с. Измеряют мощность и рассчитывают величину приращения мощности:
A.,yVo-Л ,х.
Точка В принимается на вторую контрольную точку. Величина фо определяется в виде:
фО фгх -A«Pi.
Далее снова перемешают ротор на величину ДФ2, фиксируют мощность в точке С и вычисляют
,-Л „.
Очевидно, что в системе координат |Лф|, (начало которой теперь в точке В) можно записать:
ДЛ -01п|1+- - , 1фо
UA 2 -Dlnjl-f- - - ),.
фп
Из (8) получаем:
-in/r+f:)- i7|i+t,.
(8)
(9)
Двойное выражение для D в (9) позволяет проверить точность эксперимента.
Величина коэффициента а определяет наклон линейной функции Л Л (ф). Он определяется из условия при .
и ф фж, т.
е. а -
ф«
Коэффициент b определяет мощность при . Очевидно, что его следует назначить численно равным максимальному значению мощности Л та, потребляемой мельницей при сведенных дисках. Практически
под .Vrnax подразумевается мощность, при достижении которой срабатывает тактовая защита двигателя мельницы. Обычно работают при
5,V /V,,,,,,
Таким образом, функциональный преобразователь нагрузочной характеристики (фиг. I), включенный в рассечку между блоком I измерения мощности и компаратором регулятора 6 мощности, обеспечивает подачу
15 в регулятор мощности линейно изменяющегося сигнала Л . Тем самым обеспечивается постоянная добротность контура и компенсируется нелинейность нагрузочной характеристики.
20
Формула изобретения
5
Автомат присадки для дисковой мельницы, содержащий блок измерения мощности приводного двигателя, блок регулирования механизма присадки, подключенный к механизму присадки, отличающийся тем, что, с целью сокращения энергозатрат путем повышения динамической устойчивости управления мощностью приводного двигателя дисковой мельницы, он снабжен функцио- 0 нальным преобразователем нагрузочной характеристики мельницы, вход которого соединен с выходом блока измерения мощности приводного двигателя, а выход подключен к блоку регулирования механизма присадки.
Кг.г
| Система автоматического управления мощностью привода аппарата непрерывного размола | 1982 |
|
SU1063459A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
