Изобретение относится к устройствам для контроля и регулирования боты дробляющих и измельчающий машин и установок и предназначено для применения в целлюлозно-бумажной промьтпенности на аппаратах непрерывного размола бумажнйй массы (крнических или дисковых мельницах)
Системы автоматического управления мседностью привода этих аппаратов, называемые также автоматами присадки, служат для стабилизации потребляемой приводом активной мощности, затрачиваемой на непрерывный размол массы. Стабилизация модности в свою очередь, приводит к стабилизации основных показателей качества размола - степени помола и длины волокна массы.
В размольном оборудовании такая система является составной частью конструкции.самого оборудования и , поставляется Совместно с ним. Входя в состав аппарата, она является одноконтурной системой стабилизации мощности привода аппарата.
При компоновке аппаратов в линию подготовки массы .система может служить в качестве элемента более сложной системы управления размолом в линии, когда изменение задания по мощности привода аппарата осуществлется в зависимости от степени помола на выходе линии, расхода массы вакуума в гауч-вале машины или по другим параметрам.
Известна система автоматического управления мощностью привода аппаратов непрерывного действия, включающая блок измерения мощности приводного двигателя, регулятор мощности с датчиком и исполнительный механизм осевого перемоцения рабочего органа аппарата, расположенного на вращающемся роторе l.
.Однако система не обеспечивает надежности управления.
Наиболее близкой по технической сущности к предлагаемой является система автоматического управления мощностью привода аппарата непрерывного размола, включакхцая блок измерения мощности приводного двигателя аппарата непрерывного размола, регулятор мощности с каналами формирования пропорциональной и интегральной составляЕощих закона управления и с задатчиком регулятора, и механизм осевого перемещения ротора.
При работе аппарата непрерывного размола фактически потребляемый приводным двигателем ток нагрузки измеряетсяс помощью первичных трансформаторов тока и усиливается с помсЗцью дополнительных трансформаторов в такое число раз, которое определяется коэффициентом трансформации
дополнительных трнсформаторов. Изменение тока нагрузки воспринимается схемой с четырехкратным усилением 2J.
Недостатками известной системы являются невысокая динамическая ус тойчивость замкнутой системы на всех диапазонах регулирования мощности и вытекающая из этого низкая точность стабилизации заданного значени мощности, а значит и показателей качества ра.5молотой массы.
Попытка изменения задания по мощности привода часто вызывает колебания в замкнутой системе, особенно при изменениях задания в сторону увеличения мощности, в те время как при уменьшении задания п.о мощности процессы изменения мощности носят затяжной характер. Наблюдались также в некоторых случаях и незатухающие колебания мощности в замкнутой системе. В пределах параметров настройки регулятора подавить эти колебания; практически возможно лишь за счет увеличения зоны нечувствительности регулятора, что неизбежно приводит к потере точности стабилизации заданного значения мощности и .к отклонению параметров размола ,массы от заданных. В конечном счете все это отражается на качестве размола массы, которое не остается постоянным.
Цель изобретения - повышение динамической устойчивости управления.
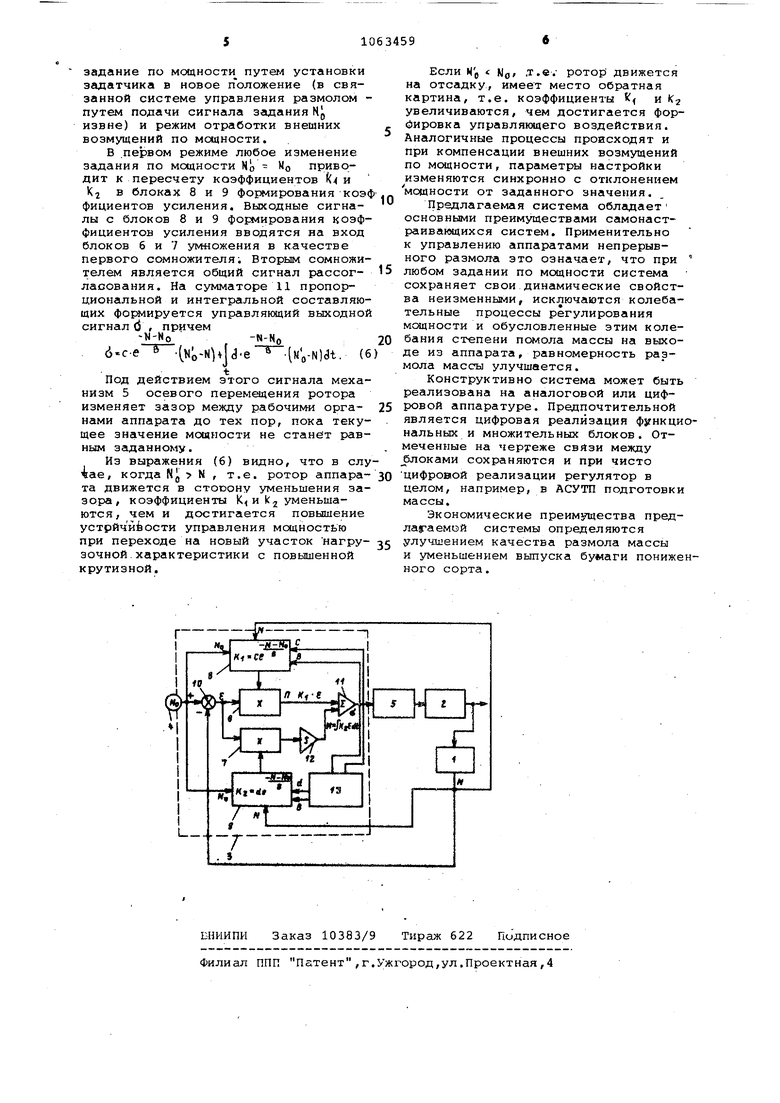
ГЕоставленная цель достигается тем, что система автоматического управления мощностью привода аппарат та непрерывного размола, включающая блок измерения мощности приводного двигателя аппарата, регулятор мседности с каналами формирования пропорциональной и интегЕ альной составлякщих закона управления модностью и с задатчиком регулятора, и механизм осевого перемещения ротора, снабжена, блоком начальных условий, формирователем общего сигнала рассогласования по мощности и- сумматором пропорциональной и интегральной составлягадих, канал формирования пропорциональной составляющей выполнен в виде первого блока умножения и перво: о блока формирования коэффициента усиления,а канал формирования интегральной составляющей - в виде второго блока умножения,второго блока формирования к коэффициента усиления и интегратора, причем первый вход каждого из блоков умножения подключен к выходу формирователя общего сигнала рассогласования по мощности,второй вход каждого из блоков умножения соединен с соответствующим выходом первого и второг6 блоков формирования коэффициентов усиления, первые входы которых соединены с задатчик.ом регулятора, вторые и третьи входы - с соответствующими выходами блока начальных условий, а четвертые входы - с выходом блока измерения мощности приводного двига.теля аппарата, причем выход первого блока умножения подключен к первому входу сумматора пропорциональной и интегральной составляющих, выход второго блока умножения подключен через интегратор к второму входу сум матора пропорциональной и интегральной составляющих, выход которого под ключен к механизму осевого перемещения ротора, а входы .формирователя общего сигнала рассогласования по мощности подключены к задатчику регулятора мощности и блоку измерения мощности. На чертеже показана блок-схема, системы. Она состоит из блока 1 измерения мощности, привода 2 аппарата н прерывного размола, регулятора 3 мс«дности с задатчиком 4, и механизма. 5осевого перемещения ротора. В состав регулятора входят блок 6умножения канала пропорциональной составляющей, блок 7 умножения канала интегральной составляющей, блок 8 формирования коэффициента усилени в канале пропорциональной составляющей, блок 9 формирования коэффициента усиления в канале интегральной составляющей, формирователь 10 общего сигнала рассогласования по мощное ти, сумматор 11 пропорциональной и интегральное составляющих, интегратор 12 в канале интегральной составляющей и блок 13 начальных условий. Основной характеристикой аппарата непрерьюного размола является нагрузочная характеристика мельницы, пред ставляющая зависимость изменения мощности приводного двигателя N от рабочего зазора ц . Обычно регулирование мощности производят в интервале мощности N,- 2 Этому интервалу соответствует зона рабочих зазоров |, - Cj) . Необходимо отметить сущест.венно нелинейный характер нагрузочной характеристики мельницы, имеюN-N -8En,. гдеНо любое заданное значение мощности в зонеМ - Nj; (Pg- зазор, соответствуюдий моцнос 8 - константа; Первоначально перед вводом системы в работу в период технологической наладки (обследования) размольной линии снимается нагрузочная характеристика аппарата N f (ср) , из которой определяется значение коэффициента В, а- также значение мощности NO (и соответствующее значение зазораЦ о), обеспечивающее требуемую степень по. .мола массы на выходе аппарата. (1) Значение крутизны нагрузочной ха-; рактеристики определяют в точке К М01, / оптимальные значения параметров К и K,j настройки регулятора соответственно по пропорциональной и интегральной составляющих, удоветворяющие условию отсутствия колебаний, , . к..(.|к,-т , (k.к2-кз Ik/., где Т - постоянная в. механизма чприсадки; коэффициент передачи механизма присадки. Из анализа неравенства (2) следует, то для исключения колебательных режимов следует изменять параметры и К2 настройки регулятора таким образом, чтобы при изменении /k/ усовие (2) выполнялось безусловно. ля этого необходимо, чтобы во всей роне регулирования мощности соблюались условия .K,-K :toonsl Ot VC -/k/-УЗ-const- (3 . Тогда выражение для К и К, приобретают вид -N-NO 1-с.е, -N-NO K, de , где с иd - константы. Выражения (4) и (5) устанавливают каким образом необходимо изменять коэффициенты К и К настройки регулятора чтобы он, будучи оптимально настроен однажды при задании по мощности, равном Ng, в дальнейшем при переходах на новые задания, большие или меньшие NO, не вызывал колебания в замкнутой системе. Численные значения коэффициентов С,,о и Ъ вводятся в блок 13 начальных условий и там запоминаются. Система работает следующим образом. На задатчике регулятора 4 мощности устанавливается значение мощности KO , которая должна затем поддерживаться регулятором 3 мсадности на.постоянном уровне. С помощью дистанционного управления механизмом 5 осевого перемещения 5 устанавливается значение мощности N - Mf), на котором проводится общая балансировка ргулятора 3. моцности. В случае баланса сигнал рассогласования по мсяцности равен нулю. При N-NO имеют , , i-i-d, т.е. регулятор 3 мощности полностью сбалансирован. В этом состоянии регулятор 3 мощности переводится в режим автоматического управления. При автоматическом управлении возможны два основных режима работы системы: режим перехода на новое
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1999 |
|
RU2150728C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| Система управления измельчительным агрегатом | 1982 |
|
SU1101302A1 |
| КОМБИНИРОВАННАЯ СИСТЕМА КООРДИНАТНО-ПАРАМЕТРИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2004 |
|
RU2279116C2 |
| Пневматический адаптивный регулятор с переменной структурой | 1983 |
|
SU1285429A1 |
| Система управления мощностью турбины | 1984 |
|
SU1227823A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1126926A1 |
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ПРИВОДА АППАРАТА НЕПРЕРЫВНОГО РАЗМОЛА, включакщая блок измерения мощности приводного двигателя аппарата, регулятор модности- с каналами формирования пропорциональной и интегральной составляющих закона управления мощностью и с задатчиком регулятора, и механизм осевого перемещения ротора, отличию щ а я с я тем, что, с целью повышения динамической устойчивости управления, она снабжена блоком начальных условий, формирователем общего сигнала рассогласования по мощности и сумматором пропорциональной и интегральной составляющих, канал формирования пропорциональной составляющей выполнен в виде первого блока умножения и первого блока фоЕ 1ирования коэффициента усиления, а канал. формирования интегральной составляющей выполнен в виде второго блока умножения, второго блока формирования коэффициента усиления и интегратора, причем первый вход каждого из блоков умножения подключен к выходу формирователя общего сигнала рассогласования по мощности, второй вход каждого из блоков умножения соединен е соответствующим выходом первого и второго блоков формирования коэффициентов усиления, первые входы которых соединены с задатчиком д регулятора, вторые и третьи входы - S с соответствук1щ11ми выходами блока -« начальных условий, а четвертые ввдср- j) ды - с выходом блока измерения мощности приводного двигателя аппарата, причем выход первого блока умножения подключен к первому входу сумматора пропорциональной и интегральной составляющих, выход второго блока умножения подключен через интегратор к второму входу сумматора пропорциональной и интегральной составляющих, IT,, выход которого подключен к механизму.; Э осевого перемещения ротора, а-входы Q формирователя общего сигнала рассог- ; |ч ласования по мощности подключены к ; задатчику регуЯятора мощности и бло- , J ку измерения мощности.ff
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Одноколейная подвесная к козлам дорога | 1919 |
|
SU241A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автомат присадки ротора конической мельницы | 1973 |
|
SU469485A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
