13
16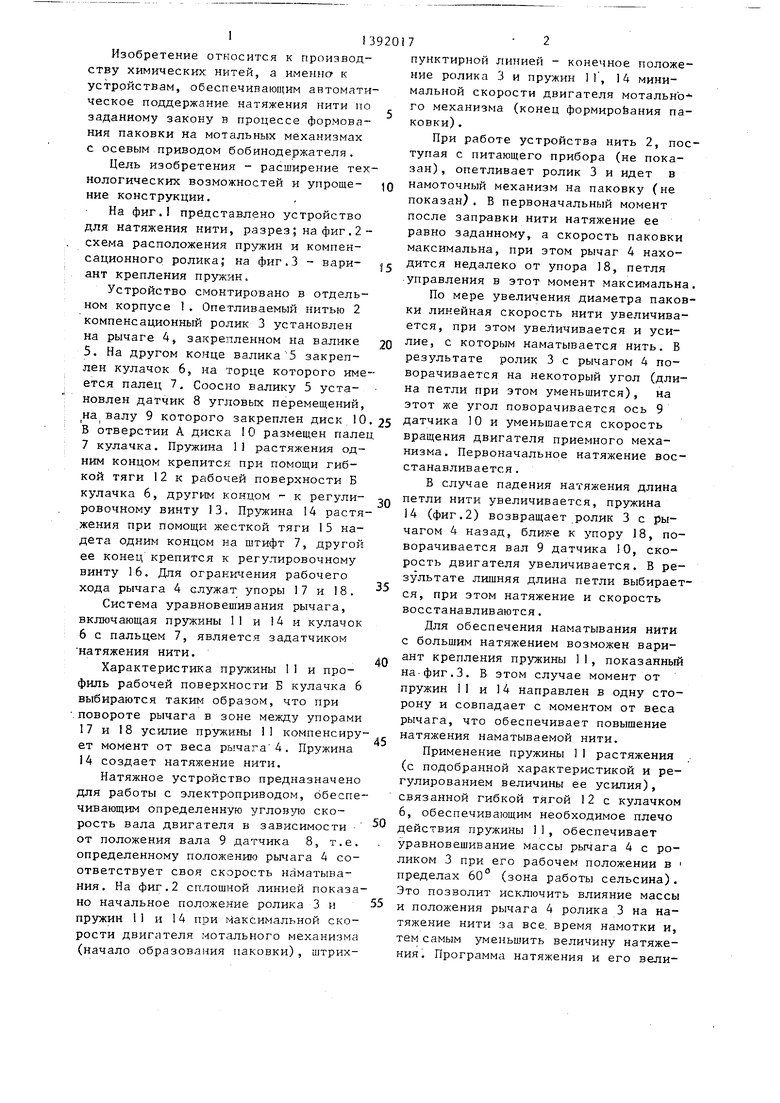
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения нити при намотке | 1988 |
|
SU1527120A1 |
| УСТРОЙСТВО ДЛЯ НАМАТЫВАНИЯ ПРЯЖИ НА КОНИЧЕСКУЮ ПАКОВКУ | 1991 |
|
RU2019492C1 |
| Паковкодержатель | 1972 |
|
SU597335A3 |
| УСТРОЙСТВО ДЛЯ МЯГКОЙ НАМОТКИ НИТЕВИДНОГО МАТЕРИАЛА | 1995 |
|
RU2095303C1 |
| Перемоточная машина для наработки стоговидных паковок | 1976 |
|
SU772965A1 |
| УСТРОЙСТВО ДЛЯ ФРИКЦИОННОГО НАМАТЫВАНИЯ ПРЯЖИ НА КОНИЧЕСКУЮ ПАКОВКУ | 1991 |
|
RU2008246C1 |
| Нитераскладчик | 1985 |
|
SU1291526A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ НИТИ В МОТАЛЬНОЙ ГОЛОВКЕ | 1971 |
|
SU311845A1 |
| Станок для обмотки замкнутых сердечников проводом | 1974 |
|
SU649052A2 |
| Устройство для бесфрикционной намотки нити | 1973 |
|
SU462789A1 |
Изобретение относится к производству химических волокон и позволяет расширить технологические возможности устройства для регулирования натяжения нити при ее намотке. Устройство содержит рычаг 4 с компенсационным роликом 3, закрепленный на валике. На свободном конце валика установлен кулачок 6, к боковой поверхности которого посредством- гибкой тяги прикреплена пружина 1I. На торцовой поверхности кулачка имеется палец 7, на котором закреплен конец пружины 4. Пружина II компенсирует вес рычага 4 с роликом, а пружина 14 задает натяжение нити. В процессе работы поворот рычага вызывает поворот вала датчика угловых перемещений, который изменяет скорость наматывания. При повороте рычага 4 расстояние от пальца 7 до оси поворота рычага 4 уменьшается, что обеспечивает уменьшение натяжения в процессе намотки паковки. 3 ил. с (Л
Фи9. 1
113
Изобретение относится к производству химических нитей, а именно к устройствам, обеспечивающим автоматическое поддержание натяжения нити по заданному закону в процессе формования паковки на мотальных механизмах с осевым.приводом бобинодержателя.
Цель изобретения - расширение технологических возможностей и упроще- ние конструкции.
На фиг.1 представлено устройство для натяжения нити, разрез; на фиг.2- схема расположения пружин и компенсационного ролика; на фиг.З - вари- ант крепления пружин,
Устройство смонтировано в отдельном корпусе . Опетливаемый нитью 2 компенсационный ролик 3 установлен на рычаге 4, закрепленном на валике 5. На другом конце валика 5 закреплен кулачок 6, на торце которого имеется палец 7, Соосно валику 5 установлен датчик 8 угловых перемещений, 9 которого закреплен диск 10 В отверстии А диска О размещен палец 7 кулачка. Пружина П растяжения одним концом крепится при помощи гибкой тяги 12 к рабочей поверхности Б кулачка 6, другим концом к регули- ровочному винту 13. Пр ткина 14 растяжения при помощи жесткой тяги 15 надета одним концом на штифт 7, другой ее конец крепится к регулировочному винту 16. Для ограк1-пения рабочего хода рычага 4 служат упоры 17 и 18.
Система уравновешивания рычага, включающая пружины I и 14 и кулачок 6 с пальцем 7, является задатчиком натяжения нити.
Характеристика 1 1 и профиль рабочей поверхности Б кулачка 6 выбираются таким образом, что при .повороте рычага в зоне между упорами 17 и 18 усилие пружины 11 компенсирует момент от веса рычага 4. Пружина 14 создает натяжение нити.
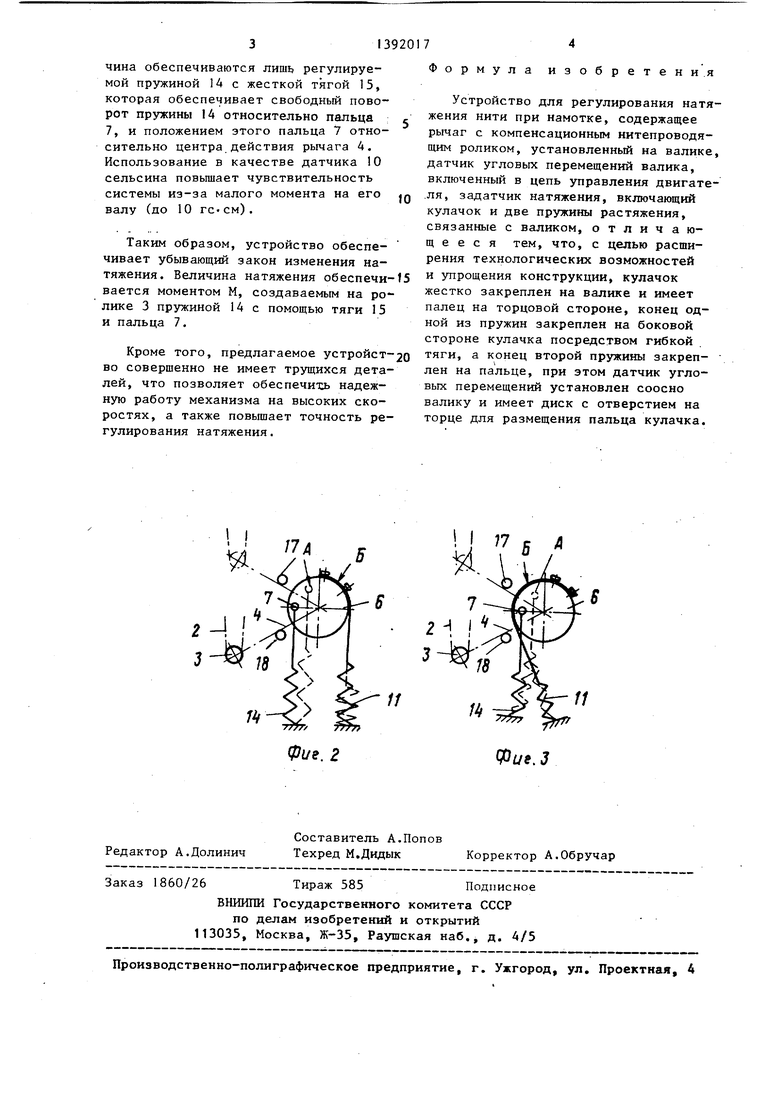
Натяжное устройство предназначено для работы с электроприводом, обеспечивающим определенную угловато скорость вала двигателя в зависимости - от положения вала 9 датчика 8, т.е. определенному положению рычага 4 соответствует своя скорость наматывания. На фиг.2 сплошной линией показано начальное положение ролика 3 и пружин 11 и 14 при максимальной скорости двигателя мотального механизма (начало образования гшковки), штрих
0 5 Q
5
5
0
5
0
пунктирной линией - конечное положение ролика 3 и пружин 11, 14 минимальной скорости двигателя мотальнЪ- го механизма (конец формиройания паковки) .
При работе устройства нить 2, поступая с питающего прибора (не показан) , опетливает ролик 3 и идет в намоточный механизм на паковку (не показан). В первоначальный момент после заправки нити натяжение ее равно заданному, а скорость паковки максимальна, при этом рычаг 4 находится недалеко от упора 18, петля управления в зтот момент максимальна.
По мере увеличения диаметра паковки линейная скорость нити увеличивается, при этом увеличивается и усилие, с которым наматывается нить. В результате ролик 3 с рычагом 4 поворачивается на некоторый угол (длина петли при этом уменьшится), на этот же угол поворачивается ось 9 датчика 10 и уменьшается скорость вращения двигателя приемного механизма. Первоначальное натяжение восстанавливается .
В случае падения натяжения длина петли нити увеличивается, пружина 14 (фиг.2) возвращает ролик 3 с рычагом 4 назад, ближе к упору 18, поворачивается вал 9 датчика 10, скорость двигателя увеличивается. В результате лишняя длина петли выбирается, при этом натяжение и скорость восстанавливаются.
Для обеспечения наматывания нити с большим натяжением возможен вариант крепления пружины 11, показанный на-фиг.З. В этом случае момент от пружин 11 и 14 направлен в одну сторону и совпадает с моментом от веса рычага, что обеспечивает повышение натяжения наматываемой нити.
Применение пружины 11 растяжения ; (с подобранной характеристикой и регулированием величины ее усилия), связанной гибкой тягой 12 с кулачком 6, обеспечивающим необходимое плечо действия пружины I1, обеспечивает уравновешивание массы рычага 4 с роликом 3 при его рабочем положении в пределах 60° (зона работы сельсина). Это позволит исключить влияние массы и положения рычага 4 ролика 3 на натяжение нити за все, время намотки и, тем самым уменьшить величину натяжения. Программа натяжения и его величина обеспечиваются лишь регулируемой пружиной 14 с жесткой тягой 15, которая обеспечивает свободный поворот пружины I4 относительно пальца 7, и положением этого пальца 7 относительно центра действия рычага 4. Использование в качестве датчика 10 сельсина повьшает чувствительность системы из-за малого момента на его валу (до 10 ГС-см).
Таким образом, устройство обеспечивает убывающий закон изменения натяжения. Величина натяжения обеспечиБается моментом М, создаваемым на ролике 3 пружиной 14 с помощью тяги 15 и пальца 7.
Кроме того, предлагаемое устройство совершенно не имеет трущихся деталей, что позволяет обеспечи-ц. надежную работу механизма на высоких скоростях, а также повышает точность регулирования натяжения.
7
Фие. 2
13920174
Формула изобретения
0
5
0
Устройство для регулирования натяжения нити при намотке, содержащее рычаг с компенсационным нитепроводя- щим роликом, установленный на валике, датчик угловых перемещений валика, включенный в цепь управления двигате- .ля, задатчик натяжения, включающий кулачок и две пружины растяжения, связанные с валиком, отличающееся тем, что, с целью расширения технологических возможностей и упрощения конструкции, кулачок жестко закреплен на валике и имеет палец на торцовой стороне, конец одной из пружин закреплен на боковой стороне кулачка посредством гибкой тяги, а конец второй пружины закреплен на пальце, при этом датчик угловых перемещений установлен соосно валику и имеет диск с отверстием на торце для размещения пальца кулачка.
(ие.З
| Регельман Х.З | |||
| и др | |||
| Машины для формования химических и минеральных волокон | |||
| - Расчет и конструирование | |||
| Л.: Машиностроение, 1972, с | |||
| Рельсовый башмак | 1921 |
|
SU166A1 |
