темы управления подачей рабочей среды в камеры. Аналогично осуществляется вращение пяты 6 вместе с выходным элементом 7 в перпендикулярной плоскости. Крутящий момент при вращении корпуса 1 относительно вертикальной
оси передается выходному элементу 7 через опорный шлицевой сухарь 2 на сегменты 4, 5 и пяту 6. При равенстве давлений в герметичных камерах, осуществляется фиксация шарнира. 1 3.п. ф-лы, 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаровой шарнир | 1974 |
|
SU572596A1 |
| ШАРНИР ЗАБОЙНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2416015C1 |
| ШАРОВОЙ ШАРНИР | 1973 |
|
SU389301A1 |
| Шаровой шарнир | 1978 |
|
SU681247A1 |
| Моментный шаровой шарнир | 1981 |
|
SU968516A1 |
| ПРОХОДЧЕСКИЙ РОБОТ И ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ПРОХОДЧЕСКОГО РОБОТА | 1988 |
|
SU1549153A1 |
| Шарнирный отклонитель | 1990 |
|
SU1776282A3 |
| УПОР ДЛЯ ОСТАНОВКИ ПАКЕТА ЛИСТОВ НА РОЛЬГАНГЕ | 1989 |
|
RU2019327C1 |
| УСТРОЙСТВО ЗАПОРНОЕ | 2009 |
|
RU2454585C2 |
| ДВУХТАКТНЫЙ ДЕТОНАЦИОННЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2570947C2 |
Изобретение относился к роботостроению, в частности к шаровым гаар- нирам, и может применяться для осуществления пространственного манипули- Л J гу. рования объектом, его ориентации, фиксации и управления перемещением. Целью изобретения является повышение надежности работы за счет увеличения жесткости и расширение функциональных возможностей за счет увеличения числа степеней свободы. При подаче рабочей среды, например, в герметичную камеру 9, образованную корпусом 1 с опорным шлицевым сухарем 2, сегментом 4 и пятой 6, происходит поворот пяты б вместе с выходным элементом 7 по часовой стрелке. Одно или несколько положений сегмента 4 фиксируется шариковым фиксатором 19, упругий элемент которого связан с датчиком сис(Л СО СО СО О) ОО /ff .;
I
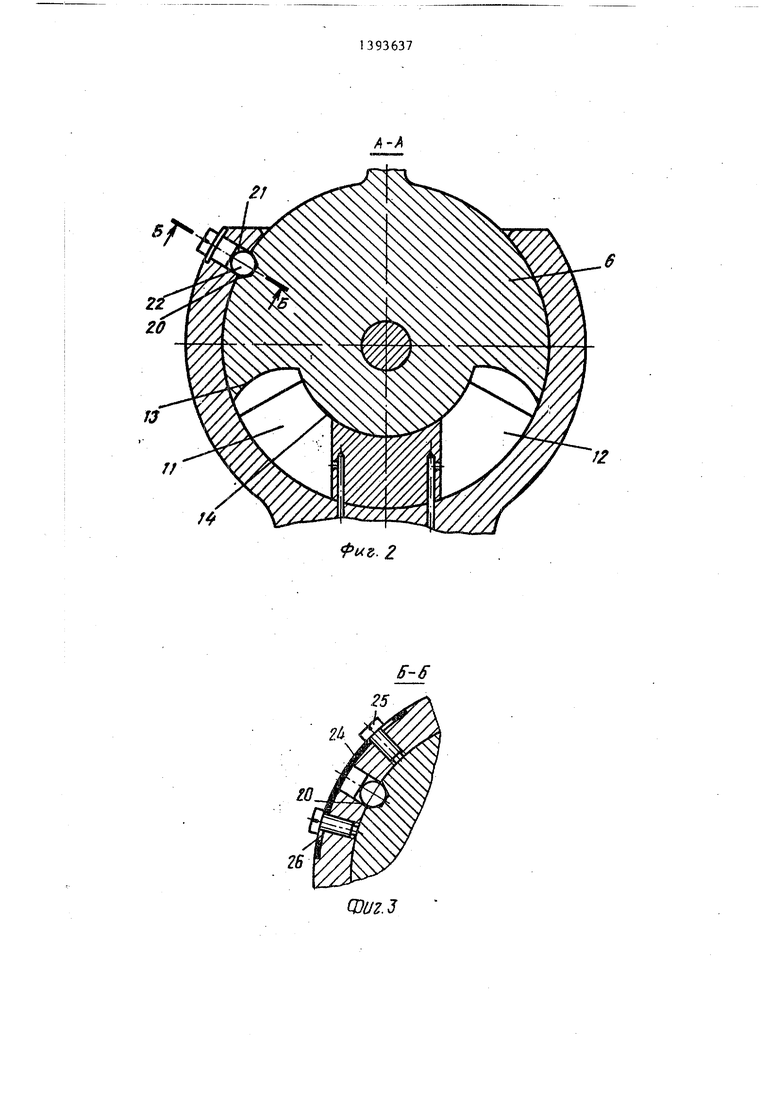
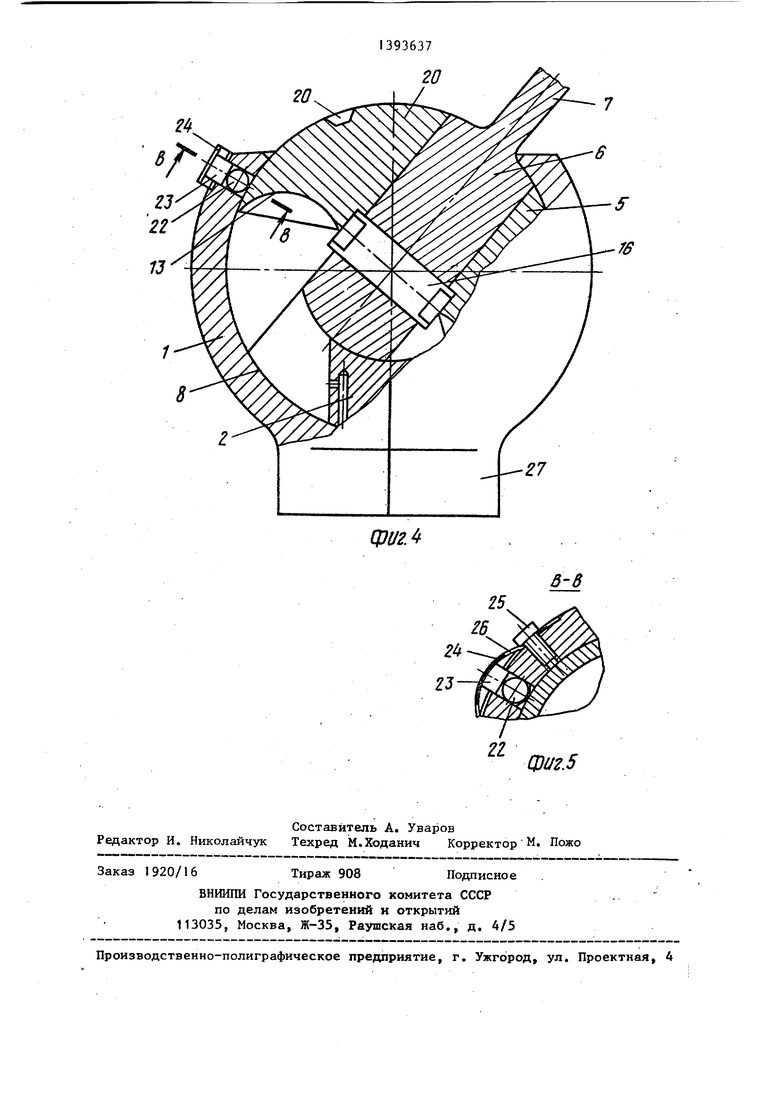
Изобретение относится к роботостроению, в частности к шаровым шарнирам, и может применяться для осуществления пространственного манипулирования объектом, его ориентации, фиксации и управления перемещением. Целью изобретения является повышение надежности работы за счет увеличения жесткости и расширение функ Циональкых возможностей за счет:увеличения числа степеней свободы.На фиг. 1 изображен шарнир ман:ипу лятора; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - шарнир манипуг лятора в рабочем положении на фиг.5 сечение В-В на ф1яг. 4.
Шарнир, манипулятора содержит корпус 1 и жестко связанный с ним опорный шлицевой сухарь 2, в котором выполнены каналы 3 для подвода рабочей среды. Внутри корпуса I установлены с возможностью вращения относительно центра сферы корпуса подпятник, выполненный в виде сферических сегментов 4 и 5 и пята 6,, жестко связанная с выходным элементом 7 - звеном манипулятора. В сегментах 4, 5 и пяте 6 выполнены иазы, образующие с внутренней поверхностью 8 корпуса 1 и сухарем 2 герметичные камеры соответственно 9, 0 и П, 12. Рабочие поверхности 13 к;1мер 9-12 вьтолнены сферическими, величиеты площадей которых больше площадей противоположных поверхностей 14 и определяются следующим образом:
13
О
2 R
2 R ... Н
где S , - площадь рабоче поверхности 13;
0
0
5
0
5
0
S - площадь плоской поверхности 14;
R - радиус сферической поверхности;
Н - высота сферической поверхности о
Это обеспечивает большую величину давления среды на рабочую поверхность 13, чем на поверхность 14, и, следовательно, поворот выходного элемента 7 в определенном направлении и больш5То силу, воздействующую на элемент 7.
В пяте 6 выполнено отверстие 15, в котором с возможностью вращения и обеспечения герметичности установлена ось 16. Указанное конструктивное решение позволяет обработать щлн- фованием торцевые поверхности пяты и подпятников и обеспечить плотность их контактирования. Ось 16 имеет на концах лыски 17, контактирующие с гнездами 18, выполненными в сегментах 4 и 5, что устраняет самопроизвольное вращение сегментов при выходе их из взаимодействия со шлицем и обеспечивает надежность последующего сочленения. В двух взаимно перпендикулярных плоскостях между корпусом I, сегментом 4 и пятой 6 установлены шариковые фиксирующие устройства 19. Фиксирующее устройство 19 имеет трапецеидальное отверстие 20, выполненное в сегменте 4 и пяте 6, отверстие 21, вьшолненное в корпусе 1, шарик 22, установленный одновременно в трапецеидальном отверстии 20 и отверстии 21, и запертый осью 23 с пружиной 24, жестко„связанными мезвду собой. Пружина 24 закреплена на корпусе 1 винтами 25 и имеет пазы 26 с двух сторон для обеспечения работоспособности. Для крепления шарнира корпус I снабжен наконечником 27.
Шарнир манипулятора работает еледующим образом.
При подаче рабочей среды в камеру 9, например, связанную с магистралью высокого давления, и диаметрально противоположную камеру 10, связанную с магистралью низкого давления, давление среды воздействует на рабочую поверхность 13 и противоположную поверхность 14. Давление среды на рабочую поверхность 13 оказывается значительно большим, ввиду большей площади ее поверхности, выполненной сферической, и сегменты 4 и 5 вместе с пятой 6 стремятся по- вернуться по часовой стрелке. Трапецеидальные отверстия 20, преодолевая сопротивление пружины 24, загоняют щарики 22 в отверстия 21, деформируя пружины 24, которые скользят пазами 26 по винтам 25. Происходит вращение сегментов 4, 5 и пяты 6 вместе с выходным элементом 7. На корпусе 1 установлен датчик (не по- ,казан), управляющий системой подачи рабочей среды и взаимодействующий с пружиной 24, деформация которой используется на включение, выключение или регулировку давления рабочей среды. При подаче давления среды в камеру 11 пята 6 вращается в направлении, перпендикулярном предьщущему. Движение в обратном направлении происходит до западания шарика 22 в отверстие 20, которое может быть выполнено в любой точке угла поворота выходного элемента 7.
В зависимости от технологического процесса может быть вьтолнено два и более трапецеидальных отверстий 20, по направлению вращения и по дуге.
Рабочая среда может быть подана одновременно или с интервалом времени в камеры, расположенные во взаимно перпендикулярных плоскостях, и можно получить необходимое пространственное перемещение объекта.
3936374
Фиксация элемента 7 обеспечиваеч- ся постоянством сил давления рабочей среды в камерах. Кр.утящий момент подвизкному элементу 7 при вращении корпуса 1 вокруг вертикальной оси передается через опорный шлицевой сухарь 2 на подпятник 4, 5 и пяту 6. Крутящий момент выходному элементу 7, 10 Iнаходящемуся в наклонном положении, передается при повернутом подпятнике 4, 5 вместе с пятой 6.
15
Формула изобретения
за счет увеличения жесткости и расширения функциональных возможностей за счет увеличения числа степеней свободы, он снабжен осью, на торцах Которой выполнены диски образующие
соединения с гнездами подпятников, при этом пазы этих подпятников выполнены сферическими, площадь каждого паза больше площади противоположной поверхности герметичной камеры,
причем в двух взаимно перпендикулярных плоскостях, проходящих через ось симметрии шарнира, между корпусом, подпятниками и пятой установлены до- полнительньге фиксаторы, упругие элементы которых вьшолнены в виде плоских пружин, установленных на корпусе. 2. Шарнир по п. 1, отличающийся тем, что он снабжен системой управления подачей рабочей
среды в герметичные камеры, имеющей датчики, связанные с упругими элементами фиксаторов.
//
Л
//
/
. 2
//
//
Ц)иг.
27
ф{/2Л
Q)U2.5
| Шаровой шарнир | 1978 |
|
SU681247A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
