1
Изобретение относится к области машиностроения, в частности к устройствам с пространственным перемещением, ориентацией и фиксацией рабочих органов, например манипуляторам, в которых требуется обеспечить несколько степеней свободы сочленяемых звеньев, передачу через шариир значительных моментов под углами, автоматическое изменение положения звеньев с последующей их фиксацией в требуемом положении.
Известен шаровой шарнир, содержащий корпус, пяту, соединенную с подвижным элементом и снабженную кольцевым гребнем; подвижный подпятник, выполненный в виде полусферы с пазом и выступом и установленный в корпусе 1.
Недостатком указанного шарнира является отсутствие в нем гидравлических камер и коммуникаций и, следовательно, невозможность автоматического перемещения и фиксации пяты с подвижным элементом, составляющих основу действия любого манипулятора, что существенно ограничивает область применения известного шарнира.
Известен также шаровой шарнир, содержащий корпус, пяту, соединенную с подвижным элементом и снабженную секторным выступом, подпятник, выполненный в виде сферического сегмента, и образованные между ниними гидравлические камеры 2.
Недостаток указанного шарнира состоит в том, что он не обеспечивает передачу крутящего момента от корпуса шарнира пяте в связи с отсутствием между ними силовых связей. Вследствие этого пята при появлении активного или реактивного момента от подвижного элемента неизбежно будет вращаться в подпятнике относительно продольной оси подвижного элемента. Кроме этого, конструкция шарнира достаточно сложна, предусматривает применение ряда упругих элементов - пружин, вкладышей, гофрированной мембраны и других деталей, снижающих динамичность шарнира, его чувствительность, управляемость и иадежность в работе.
Данное устройство по своей сущности и достигаемому результату наиболее близко изобретению.
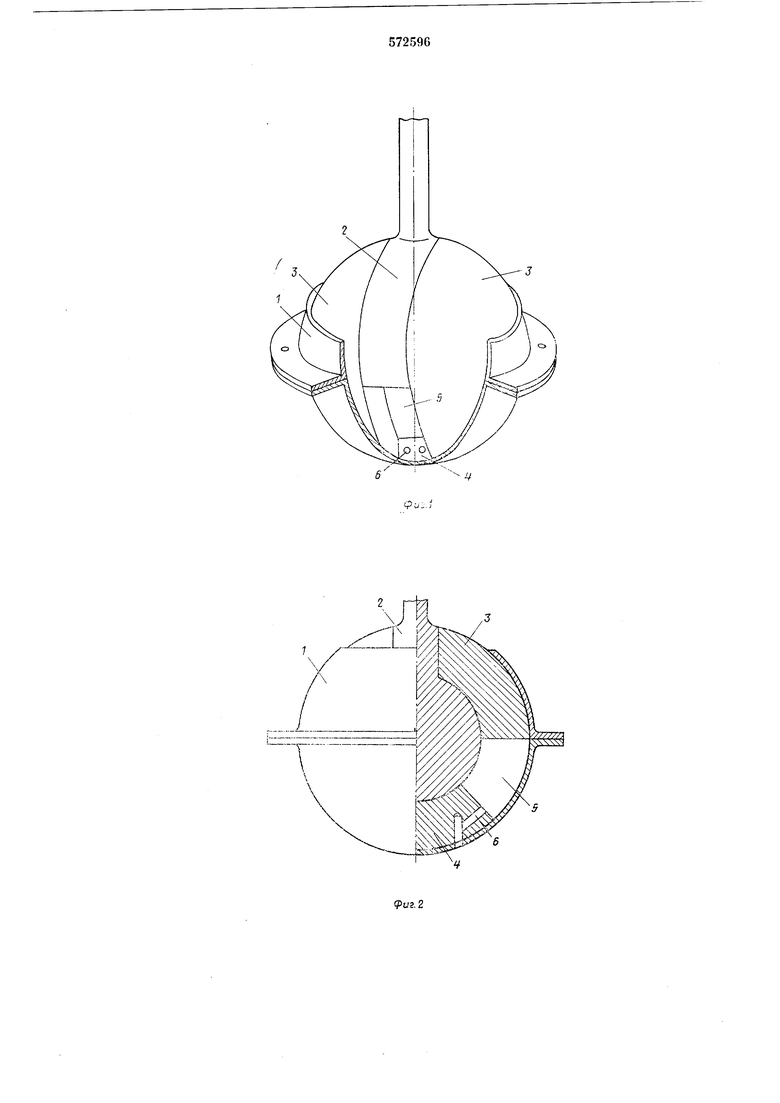
Для расширения маневренности, повьнпения нагрузочной способности и надежности работы предлагаемого устройства пята в зоне соединения с подвижным элементом выполнена с меридиальным направляющим гребнем, корпус со сферической полостью выполнен с направляющим опорным шлицем, а подпятник- со сферическими сегментами, имеющими паз, ответный по сечению опорному шлицу, и обеспечивающими возможность поворота подпятника вокруг центра шарпира вдоль шлица, при этом гидравлические камеры ограничены - кроме сферических поверхностей пяты и корпуса - также поверхностями торцов гребня пяты, направляющего шлица и пазов подпятника. Описанное выполнение шарового шарнира целесоо)бразно, так как такая конструкция шарнира, сохраняя возможность ав томатического поворота пяты вокруг центра шарнира в любой плоскости, проходящей через продольную ось подвижного элемента, н фиксации пяты в требуемом положении, дополнительно обеонечивает передачу через шарнир большого крутящего момента, в том числе и под углом между продольной осью подвижного элемента и корпусом шарнира. В конструкции шарнира отсутствуют упругие элементы и подвижные вкладыши, что повышает динамичность и надежность шарнира в работе. На фиг. 1 изображен описываемый шарнир с разрезом корпуса, общий вид; на фиг. 2-- то же, вид спереди с разрезом по оси. Устройство включает разъемный корпус I, пяту 2 с налравляюпиш гребнем, имеющую воз.можпость иоворота в подпятнике вокруг центра шарнира в плоскости гребня пяты. Подпятник состоит из двух шаровых сегмеитов 3 с пазами и может поворачиваться вместе с пятой в корпусе вокруг центра шарнира по направляющему шлицу 4, жестко связанному с корпусом и установленному под углом 90° к плоскости гребня пяты. Торцы гребня пяты, налравляющего шлица, пазы и кольцевые поверхности подпятника, а также сферические поверхности пяты и корпуса шарнира образуют камеры 5, заполняемые рабочей жидкоетью через отверстия 6, выполиенные в направляющем шлице. Эти отверстия соединены либо с нагнетающей, либо со сливной магистралью. Если одну из камер соединить со сливной, а диаметрально противоположную камеру с нагнетающей магистралью узла подачи или слива рабочей жидкости, то, вследствие преобладания сил давления жидкости в камере высокого давления, пята с подвижным элементом будет разворачиваться вокруг центра шарнира в сторону камеры низкого давления. В момент перекрытия магистралей устанавливается равенство сил давления жидкости в камерах, и пята с -подвижным элементом надежно фиксируется. В зависимости от выбора камер происходит поворот либо только пяты в -подпятнике относительно подпятника, который остается неподвижен, либо только подпятника вместе с пятой относительно корпуса в направлении, перпендикулярном предыдущему. Так, например, лри подаче рабочей жидкости в одну из камер лод направляющим гребнем пяты, она будет поворачиваться вокруг центра шарнира между сегментами подпятника в плоскости гребня пяты. При этом подпятник остается неподвижным. Если же жидкость нагнетать в одну из камер, образованную пазами подпятника, то он вместе с пятой будет поворачиваться вокруг центра шарнира в плоскости направляющего шлица, т. е. перпендикулярно предыдущей. При необходимости рабочую жидкость можно подавать одновременно в две соседние камеры, вследствие чего пята с подвижным элеме}1том займет некоторое промежуточное положение. В случае, если через шарнир требуется передать крутящий момент, то он работает как карданная передача. Так, при вращении корпуса вокруг продольной оси крутящий момент через направляющий шлиц воспринимается подпятником и через гребень пяты передается на передающий элемент. В связи с тем, что гребень пяты и направляющий щлиц расположены во взаимно перепендикулярных плоскостях, благодаря чему пята имеет возможность свободно поворачиваться в корпусе относительно центра шарнира в любой нлоскости, щарнир допускает передачу крутящего момента под углом между продольными осями корпуса шарнира и подвижного элемента. Формула изобретения Шаровой шарнир, содержащий корпус, пяту с гребнем, жестко связанную с подвижным элементом, например с рычагом манипулятора, подпятник и образованные между ними гидравлические камеры, соединенные попеременно с нагнетательной и сливной коммуникациями для автоматического управления положением и фиксации подвижного элемента, отличающийся тем, что, с целью расщирения маневренности, ловышения нагрузочной способности и надежности работы, пята в зоне соединения с подвижным элементом выполнена с меридиальным направляющим гребнем, корпус со сферической полостью выполнен с направляющим опорным шлице.м, а подпятник -со сферическими сегментами, имеющими паз, ответный по сечению опорному шлицу, и обеспечивающими возможность поворота подпятника вокруг центра шарнира вдоль шлица, при этом гидравлические камеры ограничены - кроме сферических поверхностей пяты и корлуса - также поверхностями торцов гребня пяты, направляющего шлица и пазов подпятника. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство № 389301, кл. F 16С 11/06, 1973. 2.Патент Франции № 833434, кл. 47Ь, 13, 1941.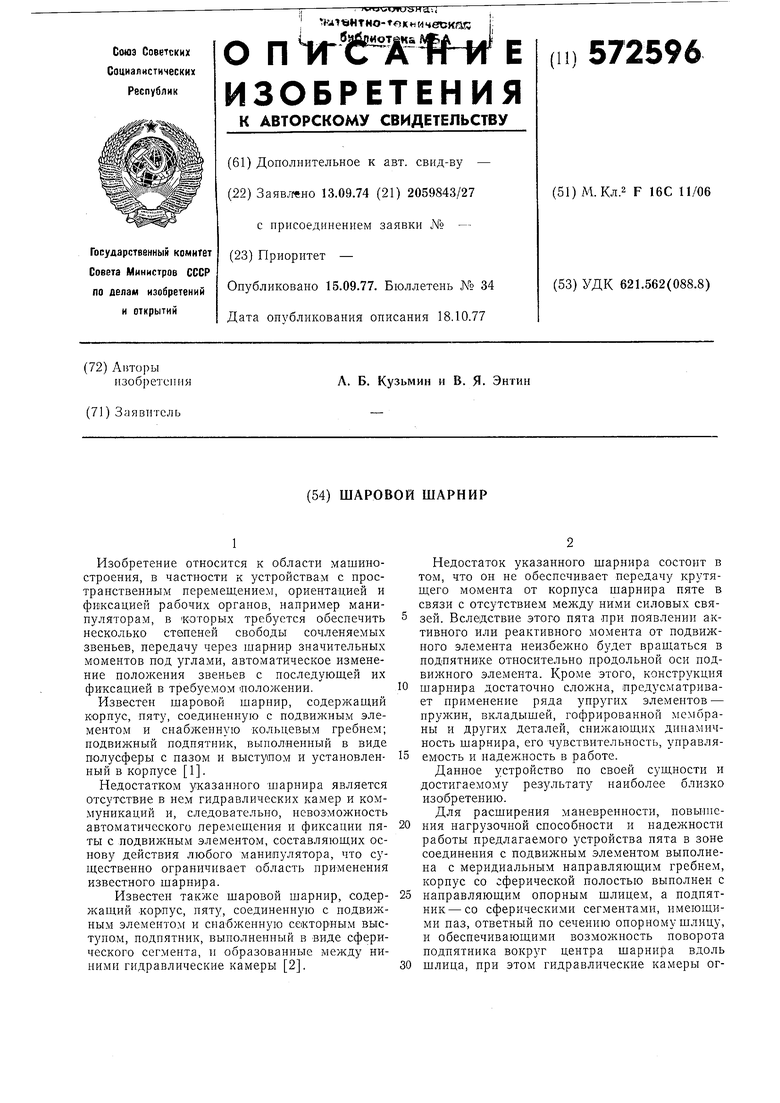
| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный шаровой шарнир | 1981 |
|
SU968516A1 |
| Шаровой шарнир | 1978 |
|
SU681247A1 |
| ШАРОВОЙ ШАРНИР | 1973 |
|
SU389301A1 |
| Шарнир манипулятора | 1986 |
|
SU1393637A1 |
| ДВУХШАРНИРНЫЙ КАРДАННЫЙ ВАЛ ЗАБОЙНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2411335C1 |
| ДВУХШАРНИРНЫЙ КАРДАННЫЙ ВАЛ ЗАБОЙНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2407877C1 |
| ШАРНИР МАНИПУЛЯТОРА (ВАРИАНТЫ) | 2005 |
|
RU2284896C1 |
| ОБЪЕМНАЯ РОТОРНАЯ ГИДРОМАШИНА | 1991 |
|
RU2012823C1 |
| Боковая опора подъемно-транспортного средства | 1986 |
|
SU1384534A1 |
| ШАРНИР ЗАБОЙНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2416015C1 |