(2) 4072570/27-11
(22) 30.05.86
(46) 07.05.88. Бюл. №17
(72) А. Г. Гавричков, В. Н. Онищенко,
Н. В. Поляк-Брагинский и А. А. Свищев
(53)621.864(088.8)
(56)Авторское свидетельство СССР
№ 11032786, кл. G 08 С 19/48, 1948.
(54)ПРИВОД МЕХАНИЗМА ПОДЪЕМА ЗАХВАТА ГРУЗОПОфЕМНОГО УСТРОЙСТВА
(57)Изобретение относится к области подъемно-транспортного машиностроения. Цель изобретения - увеличение надежности, упрощение схемы управления и исключение возможности неуправляемого опрокидьюания грузозахватного органа при разгрузке. Привод механизма подъема содержит две грузоподъемные лебедки 1 и 2 с электродвигателями 3 и 4, с барабанами 5 и 6, на которых смонтированы сельсины- датчики 7 и 8-углов поворота барабанов и дополнительный сельсин-датчик 9. При этом все сельсины-датчики через переключатель 11 режимов работы электрически связаны с узлом-синхронизации 12, который в свою очередь кинематически соединен с одним из регулируемых источников 13 и 14 питания электродвигателей. 1 ил.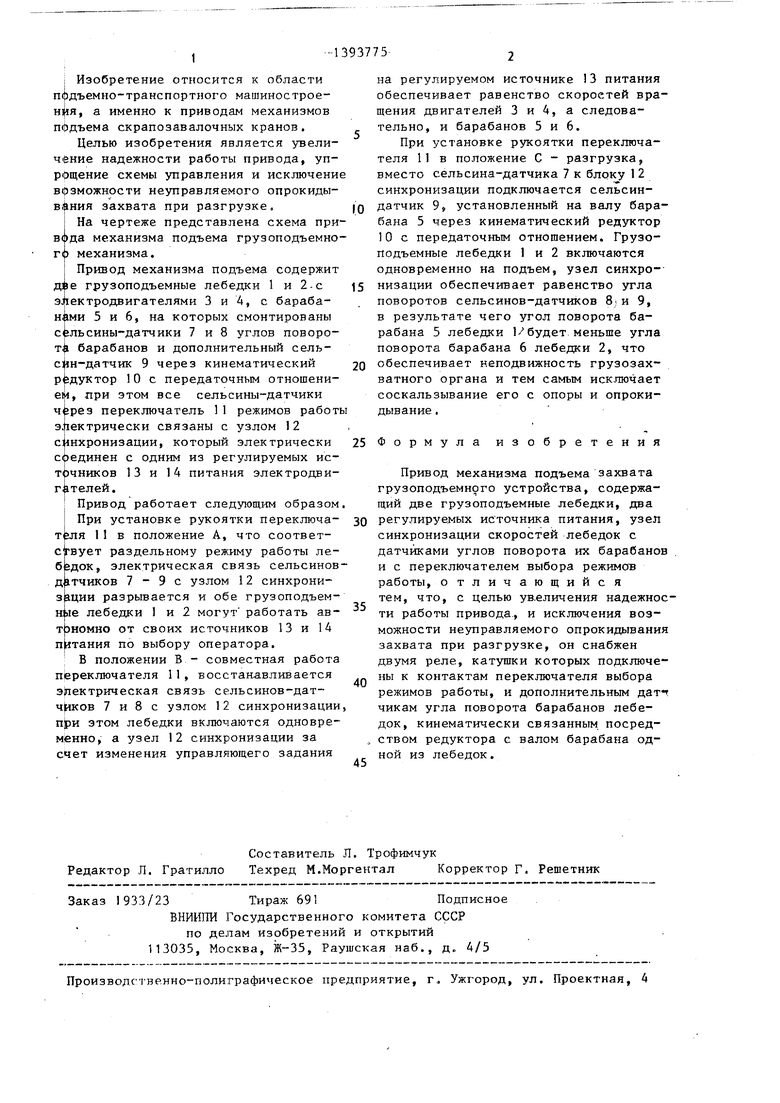
| название | год | авторы | номер документа |
|---|---|---|---|
| Программное устройство для управления грузовой лебедкой | 1976 |
|
SU753840A1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ГОРНОЙ МАССЫ | 1994 |
|
RU2119055C1 |
| Система управления гидропривода лебедок сдвоенного крана | 1989 |
|
SU1784569A1 |
| ПОДВИЖНЫЙ ПРОТИВОВЕС ГРУЗОПОДЪЕМНОГО КРАНА | 2021 |
|
RU2751926C1 |
| Кабельный кран | 1988 |
|
SU1558855A1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И МОНТАЖА ГРУЗА ВЕРТОЛЕТАМИ | 2006 |
|
RU2340513C2 |
| КАНАТОУКЛАДЧИК ЛЕБЕДКИ | 2008 |
|
RU2384518C1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2000 |
|
RU2193517C2 |
| Разделяющийся грузозахватный механизм нисходящего типа движения | 2015 |
|
RU2651813C2 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 1995 |
|
RU2085435C1 |

(Л
со со со ел
Изобретение относится к области подъемно-транспортного машиностроения, а именно к приводам механизмов подъема скрапозавалочных кранов.
Целью изобретения является увели- 41&ние надежности работы привода, уп- р(Эщение схемы управления и исключени в()зможности неуправляемого опрокидывания захвата при разгрузке.
На чертеже представлена схема привода механизма подъема грузоподъемного механизма.
Привод механизма подъема содержит д)е грузоподъемные лебедки 1 и 2-е электродвигателями 3 и 4, с барабанами 5 и 6, на которых смонтированы С1;льсины-датчики 7 и 8 углов поворота барабанов и дополнительный сель- с)5н-датчик 9 через кинематический р ;дуктор 10 с передаточным отношением, при этом все сельсины-датчики чирез переключатель 11 режимов работ электрически связаны с узлом 12 синхронизации, который электрически соединен с одним из регулируемых источников 13 и 14 питания электродвигателей.
Привод работает следующим образом
При установке рукоятки переключа- 1 1 в положение А, что соответствует раздельному режиму работы ле- бгдок, электрическая связь сельсинов датчиков 7 - 9 с узлом 12 синхрони- зации разрывается и обе грузоподъем- Hiiie лебедки 1 и 2 могут работать ав- тэномно от своих источников 13 и 14 Питания по выбору оператора.
В положении В - совместная работа переключателя 11, восстанавливается электрическая связь сельсинов-дат- 7 и 8 с узлом 12 синхронизации при этом лебедки включаются одновременно, а узел 12 синхронизации за счет изменения управляющего задания
на регулируемом источнике 13 питания обеспечивает равенство скоростей вращения двигателей 3 и 4, а следовательно, и барабанов 5 и 6.
При установке рукоятки переключателя 11 в положение С - разгрузка, вместо сельсина-датчика 7 к блоку 1 2 синхронизации подключается сельсин- датчик 9, установленный на валу барабана 5 через кинематический редуктор 10 с передаточным отношением. Грузоподъемные лебедки 1 и 2 включаются одновременно на подъем, узел синхронизации обеспечивает равенство утла поворотов сельсинов-датчиков 8; и 9, в результате чего угол поворота барабана 5 лебедки Ь- будет меньше угла поворота барабана 6 лебедки 2, что обеспечивает неподвижность грузозахватного органа и тем самым исключает соскальзывание его с опоры и опрокидывание ,
25 Формула изобретения
Привод механизма подъема захвата грузоподъемного устройства, содержащий две грузоподъемные лебедки, два регулируемых источника питания, узел синхронизации скоростей лебедок с датчиками углов поворота их барабанов и с переключателем выбора режимов работы, о тличающийся тем, что, с целью ув.еличения надежности работы привода., и исключения возможности неуправляемого опрокидывания захвата при разгрузке, он снабжен двумя реле, катушки которых подключены к контактам переключателя выбора режимов работы, и дополнительньм чикам угла поворота барабанов лебедок, кинематически связанным посредством редуктора с валом барабана одной из лебедок.
