Изобретение относится к подъемно- транспортному машиностроению и может быть использовано при проектировании кабельных кранов.
Цель изобретения - расширение эксплуатационных возможностей крана путем повышения точности индикации гру- гзозахватного органа по высоте и обеспечения автоматизации разгрузки в заданной точке.
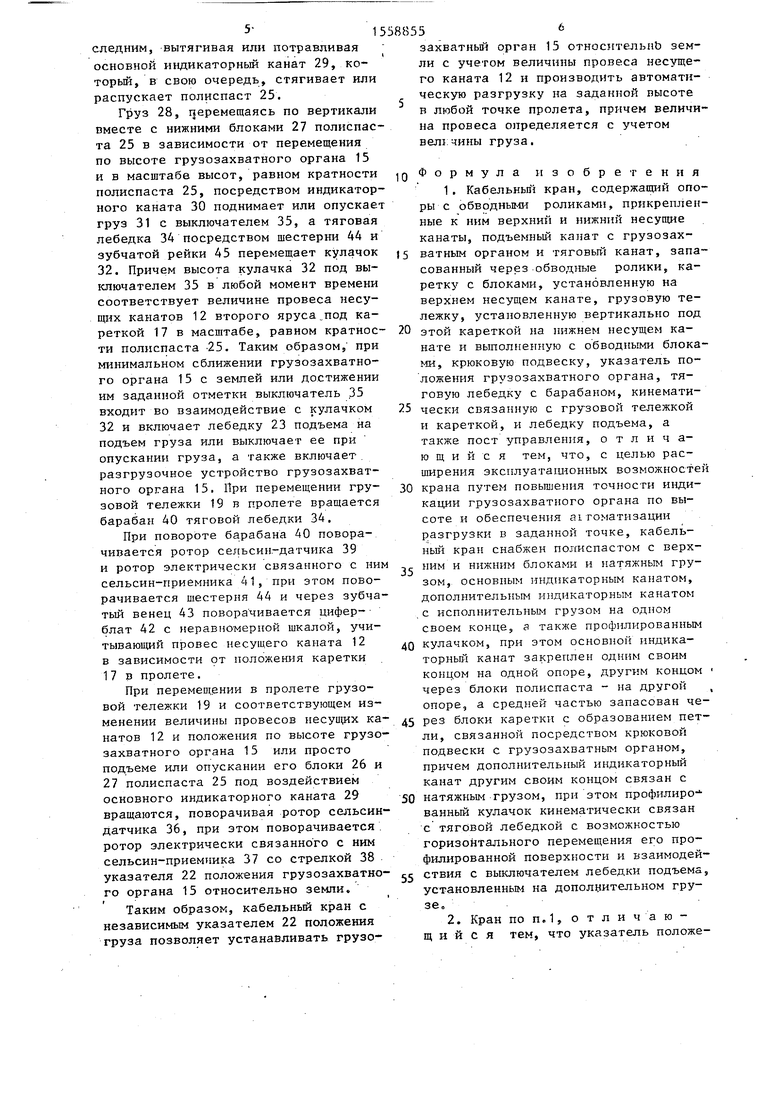
На фиг.1 изображен кабельный кран, общий вид; на фиг.2 - блок-схема соедине ния сельсинов с указателем положения; на фиг.З - указатель положения груза. Кабельный кран содержит опоры 1 и 2 с обводными роликами 3-11, прикрепленные к ним верхний и нижний не- сущие канаты 12 и 13, подъемный канат 14 с грузозахватным органом 15 и тяговый канат 16, запасованный через обводные ролики 3-10, каретку 17 с блоками 18, установленную на верхнем несущем канате 12 грузовую тележку 19, установленную вертикально под этой кареткой 17 на нижнем несущем канате 13 и выполненную с обводными блоками 20. Он также содержит крюко-, вую подвеску 21, указатель 22 положения грузозахватного органа 15, лебедку 23 подъема, а также пост 24 управления. Кабельный кран снабжен полиспастом 25 с верхним и нижним блоками 26 и 27 и натяжным грузом 28, основным индикаторным канатом 29, дополнительным индикаторным канатом 30 с дополнительным грузом 31 на одном своем конце, а также профилированным кулачком 32. Основной индикаторный канат 29 закреплен одним своим концом на одной опоре 2, другим своим концом через блоки 26 и 27 полиспаста 25 закреплен на другой опоре 1, а средней частью запасован через бло- ки 18 каретки 17 с образованием петли 33, связанной посредством крюковой подвески 21 с грузозахватным органом
5
Q
5
0
5
0
15. Дополнительный индикаторный канат 30 другим своим концом связан с натяжным грузом 28. Профилированный кулачок 32 кинематически связан с тяговой лебедкой 34 с возможностью горизонтального перемещения его профилированной поверхности и взаимодействия с выключателем 35 тяговой лебедки 34, установленным на дополнительном грузе 31. Указатель 22 положения грузозахватного органа 15 выполнен с сельсин-датчиком 36, закрепленным на верхнем блоке 26 полиспаста 25, и сельсин-приемником 37 с закрепленной на его валу стрелкой 38, электрически связанным с этим сельсин-датчиком 36, а также с дополнительным сельсин-датчиком 39, установленным на барабане 40 тяговой лебедки 34, и дополнительным сельсин-приемником 41 с циферблатом 42 и зубчатым венцом 43, электрически связанным с дополнительным сельсин-датчиком 39. При этом тяговая лебедка 34 крана выполнена с шестерней 44 и кинематически связана с грузовой тележкой 19 и кареткой 17, а кулачок 32 выполнен с зубчатой рейкой 45.
Кабельный кран работает следующим образом.
При перемещении по несущим канатам 17 грузовой тележки 19 грузозахватный орган 15 изменяет свое положение также и по высоте в связи с провесом несущих канатов 12. Изменение положения грузозахватного органа 15 по высоте происходит также и при подъеме или опускании его на подъемном канате 14. Тяговый канат 16, перемещая в пролете в первом ярусе грузовую тележку 19, с той же скоростью по несущим канатам 13 второго яруса перемещает каретку 17. При этом крюковая подвеска 21, связанная стропами с грузозахватным органом 15, опускается или поднимается вместе с последним, вытягивая или потравливая основной индикаторный канат 29, который, в свою очередь, стягивает или распускает полиспаст 25.
Груз 28, перемещаясь по вертикали вместе с нижними блоками 27 полиспаста 25 в зависимости от перемещения по высоте грузозахватного органа 15 и в масштабе высот, равном кратности полиспаста 25, посредством индикаторного каната 30 поднимает или опускае груз 31 с выключателем 35, а тяговая лебедка 34 посредством шестерни 44 и зубчатой рейки 45 перемещает кулачок 32. Причем высота кулачка 32 под выключателем 35 в любой момент времени соответствует величине провеса несущих канатов 12 второго яруса под кареткой 17 в масштабе, равном кратности полиспаста 25. Таким образом, при минимальном сближении грузозахватного органа 15 с землей или достижении им заданной отметки выключатель 35 входит во взаимодействие с кулачком 32 и включает лебедку 23 подъема на подъем груза или выключает ее при опускании груза, а также включает разгрузочное устройство грузозахватного органа 15. При перемещении грузовой тележки 19 в пролете вращается барабан 40 тяговой лебедки 34.
При повороте барабана 40 поворачивается ротор сельсин-датчика 39 и ротор электрически связанного с ним сельсин-приемника 41, при этом поворачивается шестерня 44 и через зубчатый венец 43 поворачивается циферблат 42 с неравномерной шкалой, учитывающий провес несущего каната 12 в зависимости от положения каретки 17 в пролете.
При перемещении в пролете грузовой тележки 19 и соответствующем из88556
захватный орган 15 относительно земли с учетом величины провеса несущего каната 12 и производить автоматическую разгрузку на заданной высоте в любой точке пролета, причем величина провеса определяется с учетом вел чины груза.
5
Формула изобретения
1. Кабельный кран, содержащий опоры с обводными роликами, прикрепленные к ним верхний и нижний несущие канаты, подъемный канат с грузозахватным органом и тяговый канат, запа- сованный через обводные ролики, каретку с блоками, установленную на верхнем несущем канате, грузовую тележку, установленную вертикально под
этой кареткой на нижнем несущем канате и выполненную с обводными блоками, крюковую подвеску, указатель положения грузозахватного органа, тяговую лебедку с барабаном, кинематически связанную с грузовой тележкой и кареткой, и лебедку подъема, а также пост управления, отличающийся тем, что, с целью расширения эксплуатационных возможностей
крана путем повышения точности индикации грузозахватного органа по высоте и обеспечения aiгоматизации разгрузки в заданной точке, кабельный кран снабжен полиспастом с верхним и нижним блоками и натяжным грузом, основным индикаторным канатом, дополнительным индикаторным канатом с исполнительным грузом на одном своем конце, а также профилированным
кулачком, при этом основной индикаторный канат закреплен одним своим концом на одной опоре, другим концом через блоки полиспаста - на другой , опоре, а средней частью запасован че
| название | год | авторы | номер документа |
|---|---|---|---|
| Кабельный кран | 1989 |
|
SU1768495A1 |
| Сдвоенный кабельный кран | 1976 |
|
SU583085A1 |
| Сдвоенный кабельный кран | 1985 |
|
SU1301769A1 |
| Сдвоенный кабельный кран | 1982 |
|
SU1057403A2 |
| Сдвоенный кабельный кран | 1978 |
|
SU765194A2 |
| Устройство для подъема тяжеловесных грузов | 1989 |
|
SU1708749A1 |
| КАБЕЛЬНЫЙ КРАН | 1998 |
|
RU2208571C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА, ПОДВЕШЕННОГО НА РАБОЧИХ ВЕТВЯХ ГРУЗОВОГО КАНАТА СТРЕЛОВОГО КРАНА | 2002 |
|
RU2235054C2 |
| Кабельный кран | 1987 |
|
SU1532530A1 |

Изобретение относится к подъемно-транспортному машиностроению. Цель изобретения - расширение эксплуатационных возможностей крана путем повышения точности индикации грузозахватного органа по высоте и обеспечения автоматизации разгрузки в заданной точке. При перемещении по несущим канатам 12 грузовой тележки 19 грузозахватный орган 15 изменяет свое положение по высоте в связи с провесом несущих канатов 12, при этом индикаторный канат 29 стягивает или распускает полиспаст 25. В масштабе высот перемещения по высоте грузозахватного органа 15, равной кратности полиспаста 25 перемещается груз 31 с выключателем 35, входящий во взаимодействие в заданный момент с кулачком 32 и выключающий лебедку 23 подъема. Циферблат со стрелкой указывает истинное положение груза с учетом провеса несущего каната 12. 1 з.п. ф-лы, 3 ил.
менении величины провесов несущих ка- рез блоки каретки с образованием петнатов 12 и положения по высоте грузозахватного органа 15 или просто подъеме или опускании его блоки 26 и 27 полиспаста 25 под воздействием основного индикаторного каната 29 вращаются, поворачивая ротор сельсин- датчика 36, при этом поворачивается ротор электрически связанного с ним сельсин-приемника 37 со стрелкой 38 указателя 22 положения грузозахватно- г, го органа 15 относительно земли.
Таким образом, кабельный кран с независимым указателем 22 положения груза позволяет устанавливать грузо-
ли, связанной посредством крюковой подвески с грузозахватным органом, причем дополнительный индикаторный канат другим своим концом связан с 50 натяжным грузом, при этом профилиро-1- ванный кулачок кинематически связан с тяговой лебедкой с возможностью горизонтального перемещения его профилированной поверхности и взаимодействия с выключателем лебедки подъема, установленным на дополнительном грузе,
ли, связанной посредством крюковой подвески с грузозахватным органом, причем дополнительный индикаторный канат другим своим концом связан с 0 натяжным грузом, при этом профилиро-1- ванный кулачок кинематически связан с тяговой лебедкой с возможностью горизонтального перемещения его профилированной поверхности и взаимодействия с выключателем лебедки подъема, установленным на дополнительном грузе,
«.гг
Редактор Н.Яцола
Составитель В.Быстрый Техред М.Ходанич
Заказ 814
Тираж 594
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент. г.Ужгород, ул. Гагарина,101
дополнительным сельсин-датчиком, установленным на барабане тяговой лебедки, и дополнительным сельсин-гГри- емником с циферблатом и зубчатым венцом, электрически связанным с этим дополнительным сельсин-датчиком.
/
W
Корректор О.Ципле
Подписное
| Устройство для дистанционного управления кабельными кранами | 1973 |
|
SU480631A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
