1
(21)4274102/25-28
(22)01.07о87
(46) 15.10.89. Бюл. № 38
(71)Пензенский политехнический институт
(72)С.Б.Демин
(53)531.71:531.14:534.6(088.8) (36) Авторское свидетельство СССР № 1158865, кл. G 01 В 17/00, 1983.
Авторское свидетельство СССР № 1252667, кл, G 01 В 17/00. 1985.
(54)УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ
(57) Изобретение относится к измерительной электроакустической технике. Целью изобретения является повышение
точности. в первом цикле измерятот время распространения ультразвуковых колебаний между неподвижным и подвижным преобразователями. В каждом последующем цикле измеряют время, отличающееся от предьщущего на интервал ati, до тех пор, пока величина измеряемого интервала не станет меньше i3t. Измерение производят путем заполнения временных интервалов импульсами -опорной частоты. Определяют сумму импульсов опорной частоты во всех циклах измерения, по которой судят о перемещении. Устройство для измерения линейных перемещений содержит блоки, реализующие перечисленные с операции. 8 ил.
(Л

| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1620834A1 |
| Измерительный преобразователь линейных перемещений | 1987 |
|
SU1504507A1 |
| Преобразователь линейных перемещений | 1985 |
|
SU1394033A1 |
| Ультразвуковой измеритель линейных перемещений | 1989 |
|
SU1645812A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2039929C1 |
| Измерительный преобразователь линейных перемещений | 1988 |
|
SU1589051A1 |
| Ультразвуковой измерительный преобразователь скорости линейного перемещения | 1989 |
|
SU1747892A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2189009C2 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2011294C1 |
| Дифференциальный преобразователь линейных перемещений в код | 1986 |
|
SU1515403A1 |
Изобретение относится к измерительной электроакустической технике. Целью изобретения является повышение точности. В первом цикле измеряют время распространения ультразвуковых колебаний между неподвижным и подвижным преобразователями. В каждом последующем цикле измеряют время, отличающееся от предыдущего на интервал ΔТ, до тех пор,пока величина измеряемого интервала не станет меньше ΔТ.Измерение производят путем заполнения временных интервалов импульсами опорной частоты. Определяют сумму импульсов опорной частоты во всех циклах измерения, по которой судят о перемещении. Устройство для измерения линейных перемещений содержит блоки, реализующие перечисленные операции. 8 ил.
Изобретение относится к измерительной электроакустической технике и может быть использовано для измерения линейных перемещений.
Цель изобретения - повьппение точности измерения.
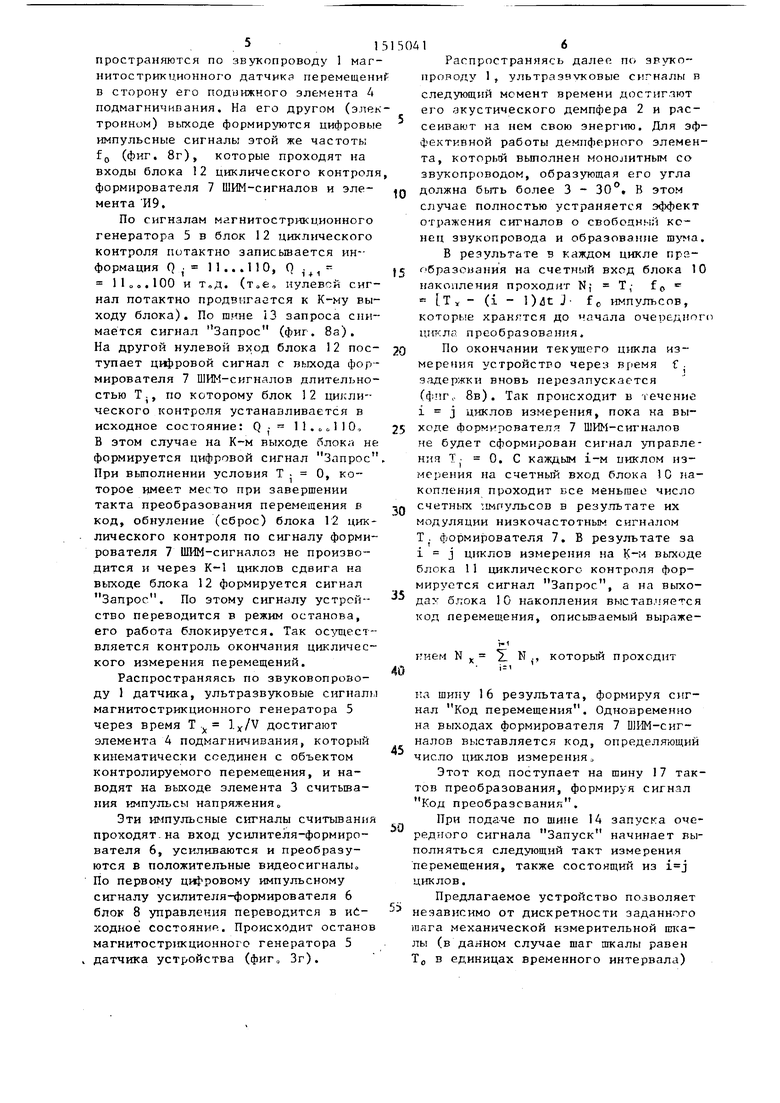
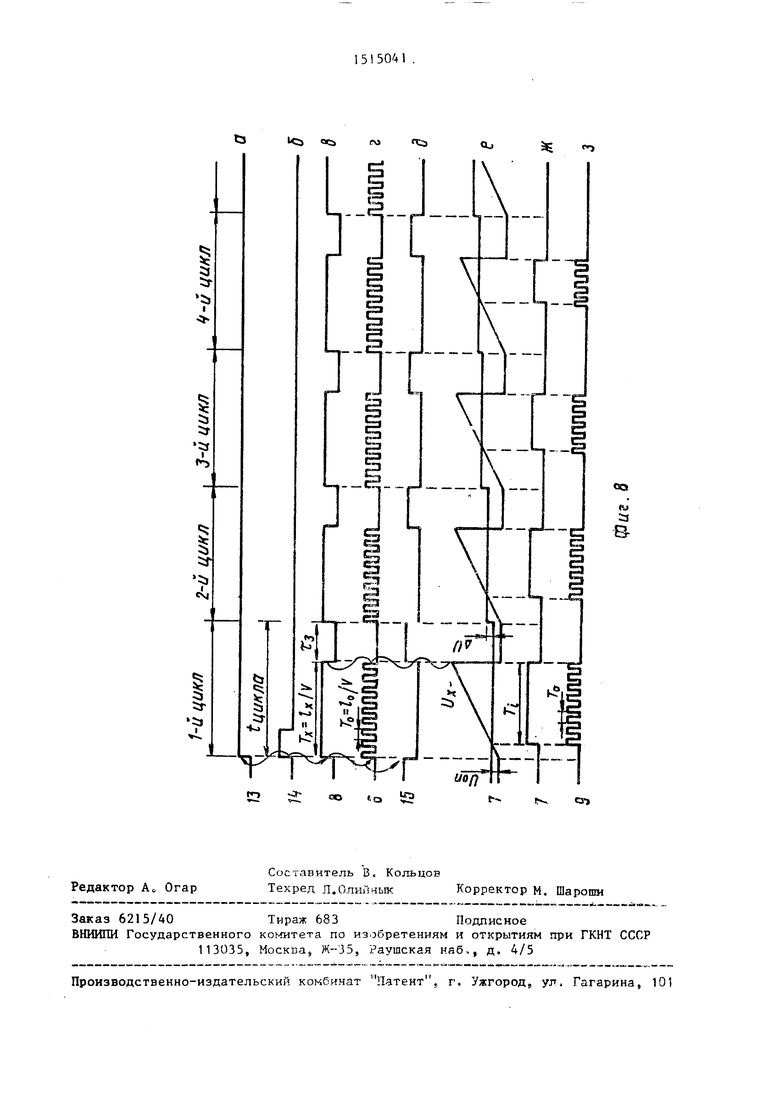
На фиг. 1 приведена блок-схема устройства для измерения линейных поремещеиий; на фиг. 2 - схемы основных блоков устройства, варианты исполнения; на фиг. 8 - временные диаграьшы работы устройства для измерения линейных перемещений..
Устройство для измерений линейных перемещений содержит магнитострлкцион- ный датчик перемещений, состоящий из звукойровода I с монолитным акустическим демпфером 2, распределенного злемента 3 считывания, подв1п ного элемента 4 подмагничивакия, магнитостр жционного генератора 5 и усилителя-формирователя 6, и цифровой канал преобразования, состоящий из формирователя 7 ИИМ-сигналов, блока 8 управления, элемента И 9, блока 10 накопления, формирователя 11 записи и блока 12 циклического контроля, а также шин 13-17 запроса, запуска, синхронизации, результата и тактов прообразования, при этом соосно со звукопроводом 1 по всей его длине установлен элемент 3 считывания, вдоль которого перемещается элемент 4 подмагничивания, кинематически соединенный с объектом контролируемого перемещения, с противоположной от акустического демпфера 2 стороны зву- копровода- 1 установлен магнитострик- ционный генератор 5, его выход подключен к одному из входов элемента
ел
01
31515
И9 и синхровходам блока 12 циклического контроля и формирователя 7 ШИМ- сигналов, а вход - к выходу блока 8 управления, счетному входу формиро- вателя 7 ШИМ-сигналов и входу формирователя 11 записи, выход последнего соединен с синхровходом блока 10 накопления, выводы элемента 3 считьша- ния подсоединены к входам усилителя- формирователя 6, его выход подключен к одному нулевому входу блока 8 управления другой нулевой вход которого соединен с одним нулевым входом блока 10 накопления, выходом бло ка 12 циклического контроля и подключен к шине 13 запроса, выход блока 8 управления подключен к шкне 15 синхронизации, выход формирователя 7 ШИМ-сигналов соединен с одним ну- левым входом блока 12 циклического контроля и другим входом элемента И9, выход последнего соединен со счетным входом блока 10 накопления, выходы формирователя 7 ШИМ-сигналов подключены к шине 17 тактов преобразования, а выходы блока 10 накопления - к шине 16 результата.
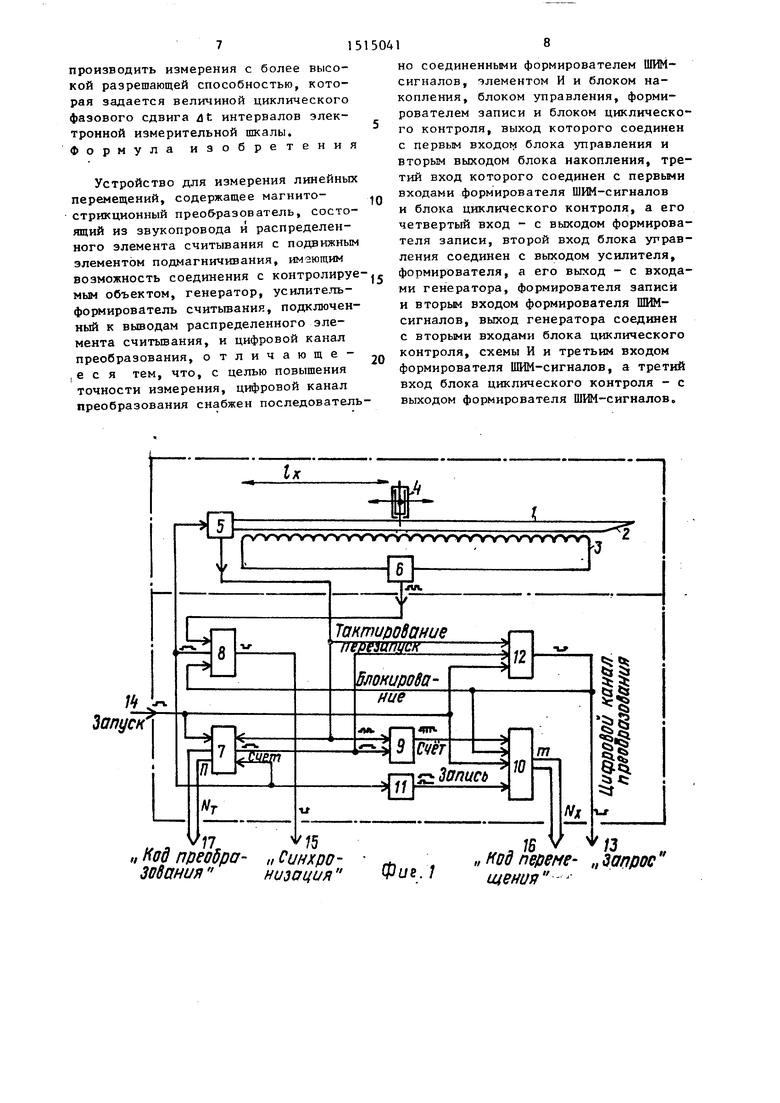
Магнитострикционный генератор 5 вьшолнен на основе звукопровода 1
датчика с подмагничиваемыми с помощью 18 элементами 19 и 20 считьшания и возбуждения, предусилителя-форми- рователя 21, ждущего мультивибратора 22 и преобразователя 23 напряжение - ток (фиг, 2).
Блок 8 управления содержит элемент 24 задержки, обеспечивающий задержку сигнала на величину f, элемент ИЛИ 25 и D-триггер 26 (фиг, 3).
Формирователь 7 ШИМ-сигналов состоит из схемы 27 формирования пилообразных сигналов, балансного компаратора 28 с цифровым выходом, счетчика 29 циклов и цифроаналогового преобразователя 30 (фиг. 4).
Формирователь 11 записи вьтолнен на основе элемента 31 задержки, включенного в обратную связь D-три- гера 32 (фиг. 5).
Блок 10 накопления содержит элемент ИЛИ 33, счетчик 34 последовательного счета, комбиУ1ационный сумматор 35 и буферный регистр 36 (фиг. 6 Сумматор 35 и регистр 36 при данном включении образуют накапливающий сумматор.
Блок 12 циклического контроля выполнен на элементе ИЛИ 37 и регистре
0
s
0
с
0
38 последовательного сдвига (фиг. 7).
Устройство работает следующим образом.
Первоначально устройство устанавливается в исходное состояние. По шине 13 запроса выставляется циЬровой сигнал Запрос (фиг. 8а), в ответ на который по шине 14 запуска подается цифровой импульсный сигнал Запуск (фиг. 8б). Происходит перевод устройства в режим работы По этому сигналу формирователь 7 ШИМ-сигналов, блоки 10 и 12 накопления и циклического контроля переводятся в нулевое состояние (фиг. 1).
По сигналу блока 12 циклического контроля осуществляется обнуление (сброс) выходного буферного каскада (регистра) блока 10 накопления, выполненного по схеме накапливающего сумматора со схемой последовательного счета на входе (не показана), подготавливая его к работе, и запуск блока 8 управления. На его прямом выходе формируется цифровой сигнал (фиг. Ив), по которому запускаются магниТосТрикционный генератор 5 Mai- нитострикционного датчика перемещений, формирователь 1 записи и формирователь 7 ШИМ-сигналов цифрового канала преобразования устройства. С другого выхода блока 8 управления цифровой сигнал противоположной полярности (фиг, 8д) проходит на щину 15 синхронизации, формируя сигнал Синхронизация .
Формирователь 11 записи по переднему фронту цифрового сигнала блока 8 обнуления вырабатьюает короткий цифровой импульсный сигнал, по которому осуществляется запись в буферный регистр информации по выходам комбинационного сумматора и обнуление (сброс) схемы последовательного счета блока 10 накопления.
Формирователь 7 ШИМ-сигиалов по первому выходу формирует циклические цифровые сигналы (фиг, 8ж) длительностью Т (i - , на основе пшротно-импульсного метода модуляции (фиг. 8е), которые поступают на один из входов элемента И 9, вьшолияюще- го функцию логического ключа, и управляет им (фиг. 8з).
Магнитострикционный генератор 5 формирует ультразвуковые сигналы опорной частоты f,, которые рас5,
пространяются по звукопроводу 1 маг- нитострикционного датчика перемещени в сторону его подвижного элемента 4 подмагничивания. На его другом (электронном) выходе формируются цифровые импульсные сигналы этой же частоты fo (фиг, 8г), которые проходят на входы блока 12 циклического контроля формирователя 7 ШИМ-сигналов и элемента И9,
По сигналам магнитострикционного генератора 5 в блок 12 циклического контроля потактно записьюается информация Q , 1 1 ... 11 О, О ,- И 00.100 и т„д. (тое„ нулевой сигнал потактно продвигается к К-му выходу блока). По шине 13 запроса снимается сигнал Запрос (фиг, 8а), На другой нулевой вход блока 12 поступает ди4)ровой сигнал с выхода формирователя 7 ШИМ-сигналов длительностью Tj, по которому блок 12 циклического контроля устанавливается в исходное состояние: Q ,- 1 1 , „ о 1 10, В этом случае на К-м выходе блока не формируется цифровой сигнал Запрос При выполнении условия Т - О, которое имеет место при завершении такта преобразования перемещения в код, обнуление (сброс) блока 12 циклического контроля по сигналу формирователя 7 ШИМ-сигналои не производится и через К-1 циклов сдвига на выходе блока 12 формируется сигнал Запрос, По этому сигналу устройство переводится в режим останова, его работа блокируется. Так осуществляется контроль окончания циклического измерения перемещений.
Распространяясь по звуковопрово- ду 1 датчика, ультразвуковые сигналы магнитострикционного генератора 5 через время Т достигают элемента 4 подмагничивания, который кинематически соединен с объектом контролируемого перемещения, и наводят на выходе элемента 3 считьша- ния импульсы напряжения
Эти импульсные с1Я налы считывания проходят-на вход усилителя-формирователя 6, усиливаются и преобразуются в положительные видеосигналы По первому цифровому импульсному сигналу усилителя-формирователя 6 блок 8 управления переводится в исходное состояние. Происходит останов магнитострикционного генератора 5 датчика устройства (фиг, Зг),
50416
Распространяясь далее по зруко- пророду 1, ультразвуковые сигналы в следующий момент времени достигают его акустического демпфера 2 и рассеивают на нем свою энергию. Для эффективной работы демпферного элемента, который вьтолнен монолитным со звукопроводом, образующая его угла
0 должна быть более 3 - 30°t В этом случае полностью устраняется эффект отражения сигналов о свободный конец звукопровода и образование , В результате в каждом цикле прй5 образования на счетный вход блока 10 накопления проходит N; Т,- fо т, - (i - I)i3t J- fo импульсов, которые хранггтся до начала очередного цикла преобразования.
0 По окончании текущего цикла измерения устройство через время f. задержки вновь перезапускается (,- 8в), Так происходит в течение i j циклов измерения, пока на вы5 ходе формирователя 7 ШИМ-сигналов не будет сформирован сит нал управления T. О, С каждым i-M циклом измерения на счетный вход блока 10 накопления проходит все меньшее число
Q счетных ; мпульсов в результате их модуляции низкочастотным сигналом Т. формирователя 7. В результате за i j циклов измерения на К-м выходе блока 11 циклического контроля формируется сигнал Запрос, а на выхо5
0
S
0
э
дау блока 10 накопления выставляется код перемещения, описьгоаемый выражет-1
нием N Т N ., который проходит
iкл шину 16 результата, формируя сигнал Код перемещения. Одновременно на выходах формирователя 7 ШИМ-сигналов выставляется код, определяющий число циклов измерения:.
Этот код поступает на шину 17 тактов преобразования, формируя сигнал Код преобразования.
При подаче по шине 1А запуска очередного сигнала Запуск начинает выполняться следующий такт измерения перемещения, также состоящий из циклов,
Предлагаемое устройство позволяет независимо от дискретности заданного шага механической измерительной Ш1са- лы (в данном случае шаг шкалы равен TO в единицах временного интервала)
производить измерения с более высокой разрешающей способностью, которая задается величиной циклического фазового сдвига t интервалов электронной измерительной шкалы. Формула изобретения
Устройство для измерения линейных перемещений, содержащее магнито- стрикционный прео&разователь, состоящий из звукопровода и распределенного элемента считывания с подвижным элементом подмагничивания, имеющим возможность соединения с контролируемым объектом, генератор, уснпите-пь- формирователь считьшания, подключенный к выводам распределенного элемента считьшания, и цифровой канал
преобразования,
отличающе- I е с я тем, что, с целью повышения точности измерения, цифровой канал преобразования снабжен последователь
5
j.
но соединенными формирователем ШИМ- сигналов, элементом И и блоком накопления, блоком управления, формирователем записи и блоком циклического контроля, выход которого соединен с первым входом блока управления и вторым выходом блока накопления, третий вход которого соединен с первьв«1и входами формирователя ШИМ-сигналов и блока циклического контроля, а его четвертый вход - с выходом формирователя записи, второй вход блока управления соединен с выходом усилителя, формирователя, а его выход - с входами генератора, формирователя записи и вторым входом формирователя ШИМ- сигналов, выход генератора соединен с вторыми входами блока циклического контроля, схемы И и третьим входом формирователя ШИМ-сигналов, а третий вход блока циклического контроля - с выходом формирователя ШИМ-сигналов.
,
rv
чн
г Ф
/
лл.
лги
j-ul
(9
s.u
Фиг.1
Фиг. ft
Фи&б
Фиг.З
Фиг.5
Ъ
Фиг. 7
«xs
ai Si
e
