фиеЛ
Изобретение относится к приводам управления насосами переменкой производительности и может быть использован преимущественно в дистанционно -управляемых многоскоростных гидропривод ных судовых лебедках, работающих с грузами любого назначения.
Цель изобретения - упрощение конструкции и возможность получения различных фиксированных значений производительности управляемого насоса.
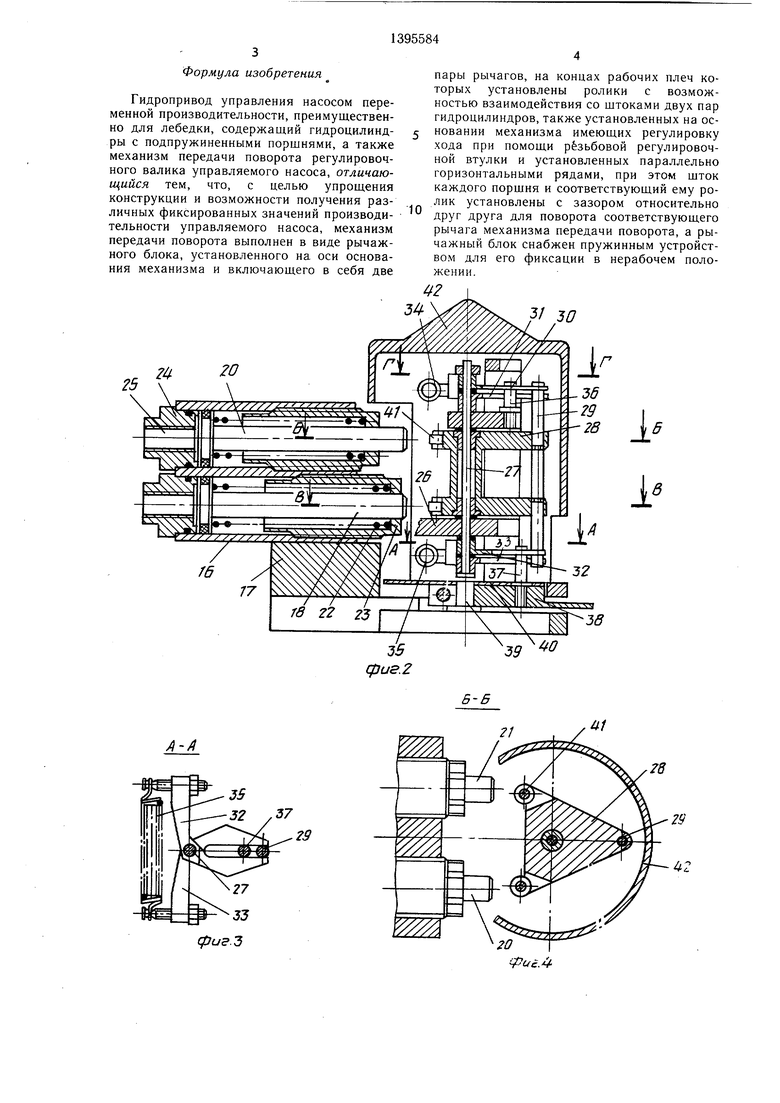
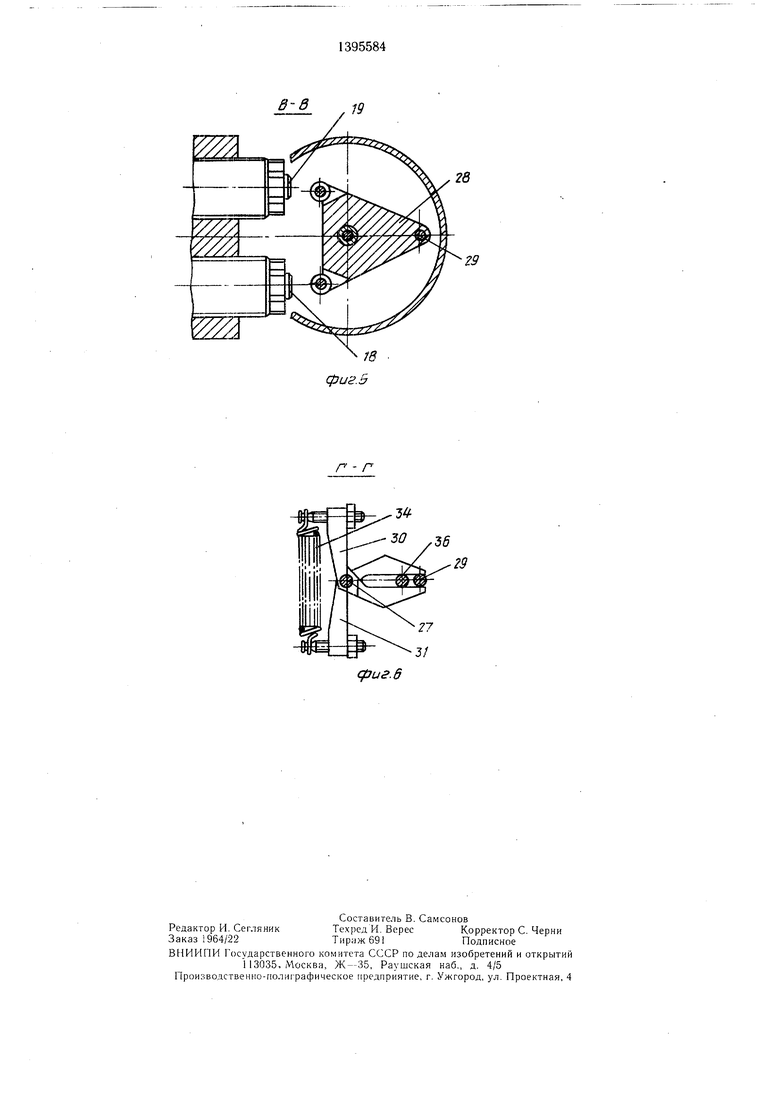
На фиг. 1 изображена структурная схема включения гидропривода управления; на фиг. 2 - общий вид гидропривода управления, разрез; на фиг. 3 - разрез А-А fia фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2; йа фиг. 5 - разрез В-В на фиг. 2; на фиг. 6 - разрез Г-Г на фиг. 2.
Гидроприводная лебедка 1 снабжена на- COCOM переменной производительности 2 си- Лового гидропривода с сервоприводом управ- )1ения 3, связанным с гидроприводом управления 4.
Рабочие полости гидроцилиндров 5-8 гидропривода управления через распределители 9-12 гидравлически связаны с насосом управления 13 и баком 14. На канате лебедки подведен груз 15.
Гидроцилиндры гидропривода управления расположены горизо1ггальными парами 6 блоке 16, который закреплен на основании 17. В гидроцилиндрах имеются поршни 18-21, поджатые в нерабочем поло- дении пружинами 22, упирающимися в регулировочные втулки 23. Рабочие полости гидроцилиндров закрыты крыщками 24 с отверстиями 25 для подвода рабочей жидкости.
На основании 17 закреплена также стойка 26, в которой на оси 27 свободно насажен рычажный блок 28 с пальцем 29, а также две пары рычагов 30 и 31, 32 и 33, стянутых пружинами соответственно 34 и 35. При этом, верхняя пара рычагов 30 и 31 охватывает верхний конец пальца 29 и ввернутый в стойку 26 палец 36, а нижняя пара рычагов 32 и 33 охватывает нижний конец пальца 29 и палец, 37, ввернутый в рычаг 38, который насажен на валик управления 39 сервопривода 3. Для визуального контроля угла поворота валика 39 на рычаге 38 закреплена шкала 40. Плечи рычажного блока 28, взаимодействующие со :лтоками порщней 18-21, снабжены роликами 41. Подвижные детали защищены от внешних механических воздействий съемным чолпаком 42.
Гидропривод управления работает следующим образом.
При работающем в режиме нулево производительности насоса 2 и включении какого-либо из распределителей, например распределителя 9, рабочая жидкость от насоса 13 пОд давлением подается в рабочую полость гидроцилиндра 5. Поршень 18
перемещается вправо, приходит в соприкосновение с соответствующим роликом 41 и при дальнейшем перемещении до упора во втулку 23 поворачивает рычажный блок 28 с
пальцем 29 против часовой стрелки. Р.ОЛИК 41 противоположного плеча рычажного блока при этом перемещается по направлению к порщню 19 в пределах имеющегося зазора, но в соприкосновении с ним не приходит. Поворот рычага 31 под воздействием
О пальца 29 вызывает растяжение пружины 34, так как рычаг 31 упирается в неподвижный палец. 36.
Воздействие пальца 29 на валик управления 39 через рычаг 33, пружину 35, ры5 чаг 32, палец 37, рычаг 38 приводит к повороту валика управления 39 на тот же угол, что и поворот рычажного блока. Насос 2 переводится в режим производительности, обеспечивающей вращение лебедки с максимальной скоростью в направ0 лении, соответствующем подъему груза.
При повышении момента на валике 39, что может быть следствием внутренней неисправности в насосе, валик 39 при повороте рычажного блока 28 остается неподвижным за счет растяжения пружины 35. Благодаря этому исключается возможность более серьезной поломки в результате приложения к валику 39 чрезмерного момента со стороны гидропривода управлеQ ния, т. е. рычаги 32 и 33 с пружиной 35 выполняют роль предохранительного устройства.
При выключении распределителя 9 рабочая полость гидроцилиндра 5 сообщается с баком 14. Под действием пружины 22
5 поршень 18 возвращается в нерабочее положение. Под действием пружины 34 рычаг 31 поворачивается по часовой стрелке до упора в неподвижный палец 36, приводя при этом рычажный блок 28 через палец 29 в нулевое положение. Вращение лебедки прекра0 щается.
При включении распределителя 11 рабочая жидкость под давлением подается в рабочую полость гидроцилиндра 7. Порщень 20 также перемещается вправо. Из фиг. 2 видно,
5 что регулировочная втулка 23 поршня 20 ввернута в блок 16 дальше, чем в предыдущем случае. Поэтому порщень 20 переместится на меньщую величину по сравнению с предыдущим случаем.
0 Соответственно на меньший угол поворачивается и валик управления 39. Лебедка вращается в том же направлении, но с меньшей скоростью.
При включении распределителей Шили 12 гидропривод управления работает аналогич5 но, но лебедка вращается в противоположном направлении и со скоростью, обусловленными величинами ходов поршней 19 и 21, ограничиваемыми втулками 23.
Формула изобретения
Гидропривод управления насосом переменной производительности, преимущественно для лебедки, содержащий гидроцилиндры с подпружиненными поршнями, а также механизм передачи поворота регулировочного валика управляемого насоса, отличающийся тем, что, с целью упрощения конструкции и возможности получения различных фиксированных значений производительности управляемого насоса, механизм передачи поворота выполнен в виде рычажного блока, установленного на оси основания механизма и включающего в себя две
пары рычагов, на концах рабочих плеч которых установлены ролики с возможностью взаимодействия со щтоками двух пар гидроцилиндров, также установленных на основании механизма имеющих регулировку хода при помощи резьбовой регулировочной втулки и установленных параллельно горизонтальными рядами, при этом шток каждого поршня и соответствующий ему ролик установлены с зазором относительно друг друга для поворота соответствующего рычага механизма передачи поворота, а рычажный блок снабжен пружинным устройством для его фиксации в нерабочем положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Программное устройство для управления грузовой лебедкой | 1976 |
|
SU753840A1 |
| Программное устройство | 1988 |
|
SU1733370A1 |
| Программное устройство | 1976 |
|
SU713821A1 |
| Устройство для управления машиной с режущим рабочим органом | 1976 |
|
SU652280A1 |
| Устройство для изменения степени сжатия поршневого двигателя внутреннего сгорания | 1991 |
|
SU1782291A3 |
| АКСИАЛЬНО-ПОРШНЕВОЙ НАСОС С РЕГУЛИРУЕМЫМ РАБОЧИМ ОБЪЕМОМ | 1994 |
|
RU2100646C1 |
| БИБЛИОТЕКА _ | 1970 |
|
SU264287A1 |
| ГИДРАВЛИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2012 |
|
RU2514812C1 |
| М. С. СЬвич, г.КГ.ЛДСТЕКАЛ. Д. Табачников, Н. И. Чугунов, Л. Г. Штрахман, М. Д. Щеглфви Н. Д. Якобсон | 1969 |
|
SU250811A1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ РЕГУЛИРУЕМЫМ АКСИАЛЬНО-ПОРШНЕВЫМ НАСОСОМ | 1991 |
|
RU2018708C1 |
Изобретение относится к приводам управления насосами переменной производительности и может быть использовано преимуш.ественно в дистанционно управляемых многоскоростных гидроприводных судовых лебедках. Цель изобретения - упро// щение конструкции и возможности получения различных фиксированных значений производительности управляемого насоса. Лебедка 1 снабжена насосом переменной производительности 2 силового гидропривода с сервоприводом управления 3, связанным с гидроприводом управления 4. Рабочие полости гидроцилиндров 5, 6, 7 и 8 гидропривода управления через распределители 9, 10, 11, 12 гидравлически связаны с насосом управления 13 и баком 14. На канате лебедки подвешен груз 15, гидроцилиндры гидропривода управления расположены горизонтальными парами в блоке, который закреплен на основании. В гидроцилиндрах имеются поршни 18, 19, 20, 21, поджатые в нерабочем положении пружинами, упи- раюш.имися в регулировочные втулки. 6 ил. 7 Г4 / Л ,,6 & (Л со со ел 01 СХ) 
2
А-А
33
сриг. З
3/ 30
cfiue.Z
28
20
.
(гиг.б
| Башта Т | |||
| М | |||
| Машиностроительная гидравлика | |||
| М.: Машиностроение, 1971, с | |||
| ВОДЯНОЙ ЦЕПНОЙ ДВИГАТЕЛЬ | 1923 |
|
SU481A1 |
| ПЕРЕДВИЖНАЯ ДИАГРАММА ДЛЯ СРАВНЕНИЯ ЦЕННОСТИ РАЗЛИЧНЫХ ПРОДУКТОВ ПО ИХ КАЛОРИЙНОСТИ | 1919 |
|
SU285A1 |
