ел
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| Серводин | 1986 |
|
SU1667000A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Аналого-цифровой инкрементный умножитель | 1982 |
|
SU1057971A1 |
| Цифровая следящая система | 1979 |
|
SU924663A1 |
| Следящая система | 1991 |
|
SU1833830A1 |
| Цифровой электропривод постоянного тока | 1989 |
|
SU1644347A1 |
| Инкроментный умножитель аналоговых сигналов | 1982 |
|
SU1057970A1 |
| Следящая система | 1978 |
|
SU746408A1 |
Изобретение относится к цифровым следящим системам с бесконтактными двигателями постоянного тока и может быть использовано в манипуляционных работах и других устройствах автоматики в качестве исполнительных следящих систем. Цель изобретения - повышение быстродействия. Цифровая следящая система содержит измеритель 1 рассогласования, блок2 выделения модуля, первый пороговый элемент 3. первый блок 4 умножения, цифровой широт- но-импульсный преобразователь 5, коммутатор 6 фаз, синхронный электродвигатель 7, датчик 8 положения ротора, второй пороговый элемент 9, второй блок 10 умножения, преобразователь 11 код - частота импульсов. Цель изобретения достигается за счет введения связей второго входа и выхода первого блока умножения соответственно с входом цифровой следящей системы и входом задания цифрового широТно-имп льсн Ьго преобразователя и изменения конструкции последнего. 4 ил.
х| ч
ч о ю
Изобретение относится, к цифровым следящим системам с бесконтактными двигателями постоянного тока (БДПТ) и может быть использовано в манипуляционных роботах и других устройствах автоматики в качестве исполнительных следящих систем.
Цель изобретения - повышение быстродействия.
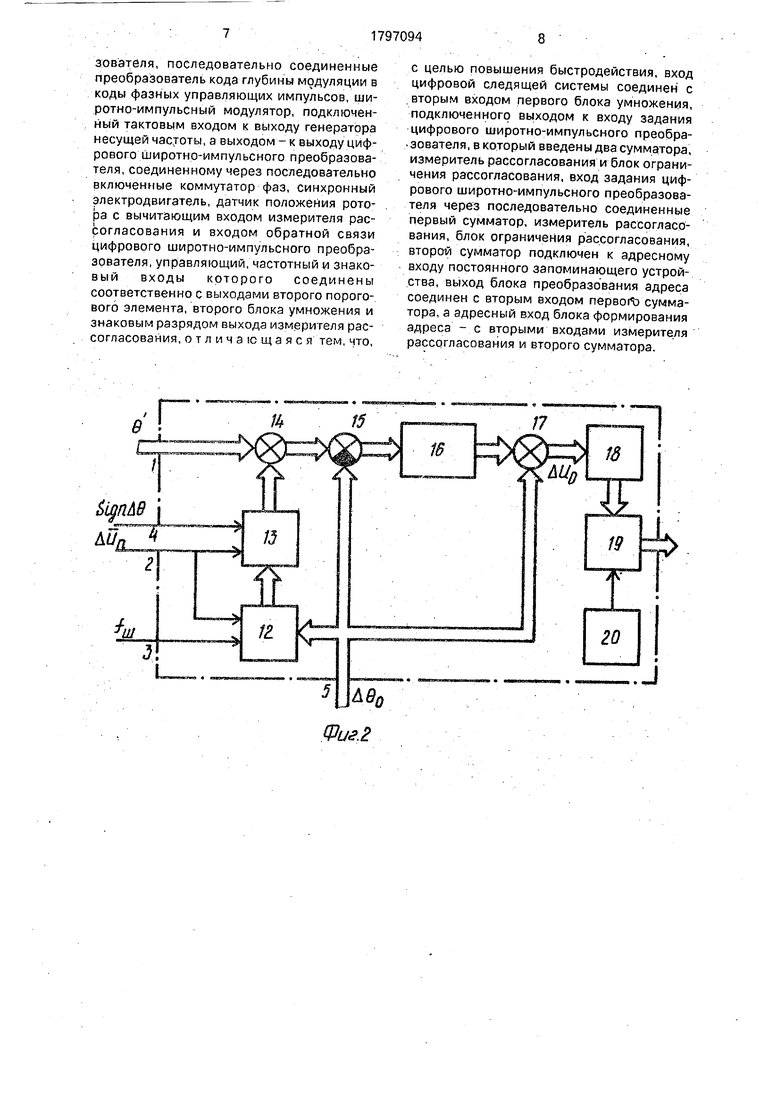
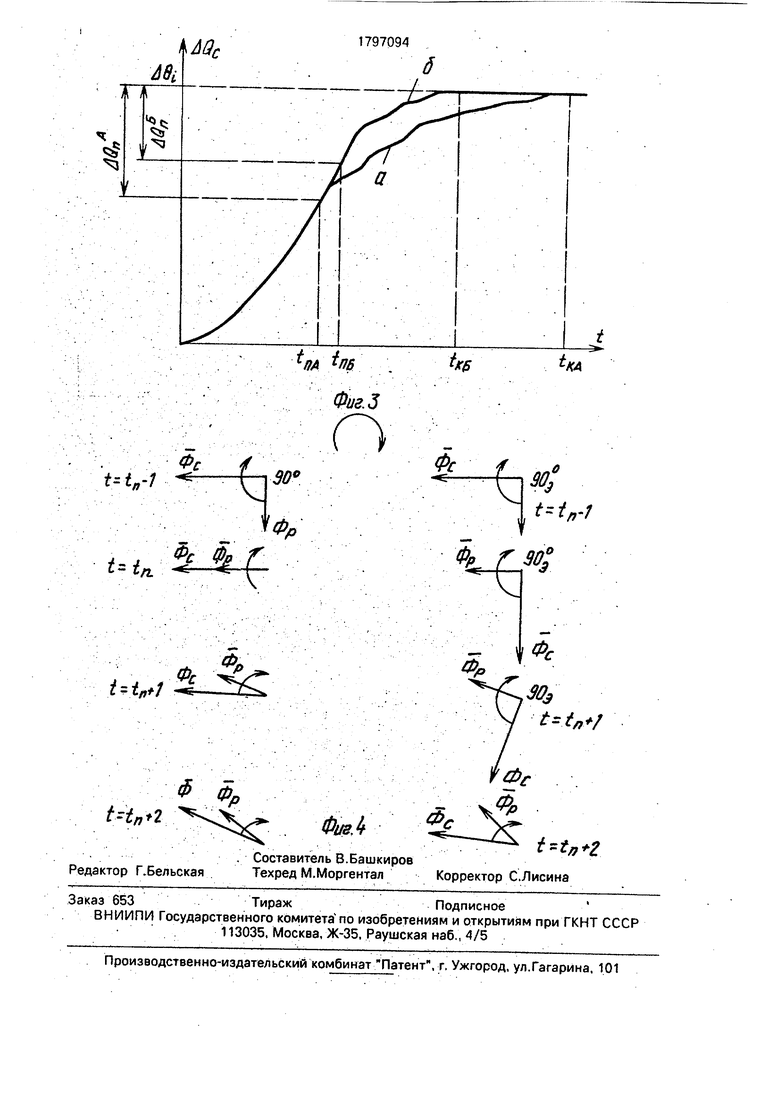
На фиг. 1 представлена функциональная схема цифровой следящей системы; на фиг. 2 - функциональная схема цифрового шйротно-импульсного преобразователя; на фиг. 3 - эпюры основных координат системы-прототипа (фиг.З.а) и цифровой следящей системы (фиг.3,6) при отработке скачкообразного входного сигнала; на фиг. 4 приведены векторные диаграммы MJI-HHT- ных потоков статора Фс и ротора Фр для системы прототипа (фиг.4,а) и цифровой : следящей системы (фиг.4,6) в режиме БДПТ (t tn -1); в момент переключения (t tn) и в дискретно-шаговом режиме системы (t tn+ + 1), (t tn + 2). .
Цифровая следящая система содержит- (фиг. 1) измеритель 1 рассогласования, блок 2 выделения модуля, первый пороговый элемент 3, первый блок 4 умножения, цифровой широтно-импульсный преобразователь 5, коммутатор б фаз, синхронный электродвигатель 7, датчик 8 положения ротора, второй пороговый элемент 8, второй блок 10 умножения, преобразователь 11 код-частота импульсов.
Цифровой широтно-импульсный преобразователь 5 содержит (фиг. 2) блок 12 формирования адреса, блок 13 преобразования адреса, первый сумматор 14, измеритель 15 рассогласования, блок ограничения рассогласования 16, второй сумматор 17, преобразователь 18 кода глубины модуляции в коды фазных управляющих импульсов, широтно- импульсный модулятор 19, генератор,20 несущей частоты,.
Цифровая следящая система работает следующим образом.
Блоки 12, 13 при работе системы в режиме непрерывного управления отключены и на второй вход сумматора 14 поступает нуль. При переходе системы в шаговый режим в блоке 12 записывается текущее значение кода угла положения ротора, которое в дальнейшем изменяется за счет импульсов, поступающих с преобразователя 11. В зависимости от знака ошибки к выходному коду блока 12 в блоке 13 прибавляется код, соответствующий углу ±90° эл,град. Таким образом формируется поле статора, магнитный поток которого Фс перпендикулярен магнитному потоку ротора Фр, и момент.
0
5
0
5
0
5
0
5
0
5
развиваемый при этом двигателем, является тормозящим. При любом режиме работы системы на выходе сумматора 14 формируется код углового положения поля статора, на выходе измерителя 15 -,код угла рассогласования между полями Фс и Фр, который ограничивается при помощи блока 16 в пределах ±90° эд. градусе в, что предотвращает выпадение двигателя из синхронизма. В преобразователе 18 записаны коды длительностей и знаки (например, гармонических) импульсов m функций, сдвинутых на угол 2я/т радиан, которые поступают на входы модулятора 19, где.преобразуются в широтно модулированные последовательности импульсов.
Блок 13 может быть выполнен путем синтеза комбинационных схем с использованием арифметико-логических устройств, в шаговом режиме он выполняет операцию сложения (вычитания) над выходным кодом блока 12 и двоичным представлением угла в 90 эл. град, .которое однозначно определяется коэффициентом передачи датчика положения ротора и числом пар полюсов электрической машины.
Комбинационные схемы по сигналам знака ошибки sign A 0 и выходного сигнала AUn порогового элемента Дип позволяют выбрать для реализации одну из функций арифметико-логического устройства (АЛУ): А + В или А - В, где А - входы АЛУ, на которые поступает код блока 12; В - входы АЛУ, код на которые соответствует углу в 90 эл.град. В статическом режиме ошибка системы равна нулю, пороговый элемент 9 имеет выходное значение равное 1, а пороговый элемент 3 - нулевой сигнал. В результате на первый вход сумматора 14 поступает нулевой сигнал. Поскольку ошибка системы равна нулю, импульсы на выходе преобразователя 11 отсутствуют и модулятор 19 генерирует последовательности импульсов постоянной скважности. При этом поле статора неподвижно, максимально по величине и угол поворота его относительно ротора равен а - aresinMH/M0. Таким образом, в режиме покоя двигатель развивает синхронизирующий момент, полностью компенсирующий .момент нагрузки на валу при нулевом рассогласовании, т.е. данная система, как и прототип, обладает астатизмом по отношению к моментным возмущениям..
При подаче на вход системы скачкообразного задающего воздействия Дф код модуля рассогласования I Д0 больше порога срабатывания порогового элемента 3. в результате на его выходе присутствует высокий уровень, а на выходе порогового
элемента 9 - низкий. Преобразователь 11 отключен от блока 12 и задающее воздействие поступает на первый вход сумматора 14, на второй вход которого поступает 0, т.к. блоки 12, 13 выключены сигналом AUn. На входе измерителя .15 присутствует код разности Дф - Л#о и если он больше по абсолютному значению кода, соответствующего 90 эл.градусов, то он ограничивается блоком 16, после чего он складывается с кодом угла положения ротора. Таким образом, система работает в непрерывном режиме. По мере отработки задающего воздействия рассогласования уменьшается и в некоторый момент t tn и происходит переключение пороговых элементов 3 и 9. При этом в блоке 12 записывается текущее значение кода датчика, выходной код блока 4 обнуляется, преобразователь 11 через блок 10 подключается к блоку 12, кроме того, по сигналам ДПп и sign Доопределяется режим р аботы блока 13 так, что магнитный поток Фс поворачивается на 180 эл.градусов, т.е. в блоке 13 осуществляется прибы- вание кода, соответствующего углу в 90 эд.градусов при Д# 0, и вычитание при IД0 0, к выходному коду блока 12. Двигатель начинает эффективно тормозиться, т.к. поля статора и ротора перпендикулярны. Вследствие ненулевого рассогласования с преобразователя 11 поступают импульсы и поле статора продолжает вращаться в том же направлении, при этом двигатель продолжает тормозиться.
При недетерминированных моментах возмущения поле ротора в системе-прототипе может уйти вперед, что приведет к увеличению рассогласования между полями больше, чем 90 эд.градусов, что в свою очередь повлечет выпадение двигателя из синхронизма. Поэтому ограничитель 15
Формула изобретения Цифровая следящая система, содержащая измеритель рассогласования, подключенный через последовательно соединенные блок выделения модуля, первый пороговый элемент к первому входу первого блока умножения, выход блока выделения модуля через второй пороговый элемент подключен к первому входу второго блока умножения, к второму входу которого через преобразователь код-частота импульсов подключен выход измерителя рассогласования, соединённого суммирующим
ограничивает,абсолютное значение между полями $с и з на уровне эл, градусов, что вызывает сохранение наибольшего тормо-. зящего момента и предотвращает нарушение работы системы.
Указанные коммутации приводят к тому, что, начиная с момента времени t tn, двигатель и система в целом начинают работать как шаговые. Этот режим характеризуется тем, что магнитное поле статорных обмоток двигателя перемещается в пространстве дискретно, на один шаг с приходом каждого нового импульса от преобразователя 11, частота которых определается рассогласованием Д# и законом преобразования. При этом знак момента на валу электродвигателя определяется взаимной ориентацией магнитных.потоков ротора Фр и статора Фс. Такой режим работы системы будет продолжаться до момента времени t IK, когда рассогласование системы Д# станет равным нулю Д# 0. При этом угол поворота магнитного потока статора относительно равен:
, Мн a arcsin -j-gMO
Таким образом, поворот поля статора на 180 эл.градусов в момент перехода из непрерывного режима в шаговый и использование насыщения рассогласования между полями статора и ротора позволяют существенно повысить быстродействие цифровой следящей системы.
Предлагаемая цифровая следящая система наиболее эффективно может быть использована в манипуляционных роботах, где требуется высокое быстродействие, недопустимы перерегулирования, а нагрузочный момент на валу электродвигателя
изменяется в широких пределах.
входом с входом цифровой следящей системы, цифровой широтно-импульсный преобразователь, содержащий последовательно соединенные блок формирования адреса, блок преобразования адреса, подключенный знаковым входом к знаковому входу цифрового широтно-импульсного преобразователя, а управляющим входом - к его управляющему входу и управляющему входу блока формирования адреса, частотный и адресный входы которого являются частотным входом и входом обратной связи цифровогоширотно-импульсного
зователя, последовательно соединенные преобразователь кода глубины модуляции в коды фазных управляющих импульсов, щи- ротно-импульсный модулятор, подключенный тактовым входом к выходу генератора несущей частоты, а выходом - к выходу цифрового широтно-импульсного преобразователя, соединенному через последовательно включенные коммутатор фаз, синхронный электродвигатель, датчик положения ротора с вычитающим входом измерителя рас- Ьогласования и входом обратной связи цифрового широтно-импульсного преобразователя, управляющий, частотный и знаковый входы которого соединены соответственно с выходами второго порогового элемента, второго блока умножения и знаковым разрядом выхода измерителя рассогласования, о т л и ч з ю щ а я с я тем, что.
с целью повышения быстродействия, вход цифровой следящей системы соединен с .вторым входом первого блока умножения, подключенного выходом к входу задания цифрового широтно-импульсного преобра- зователя, в который введены два сумматора, измеритель рассогласования и блок ограничения рассогласования, вход задания цифрового широтно-импульсного преобразователя через последовательно соединенные первый сумматор, измеритель рассогласования, блок ограничения рассогласования, второй сумматор подключен к адресному входу постоянного запоминающего устройства, выход блока преобразования адреса соединен с вторым входом первогЪ сумматора, а адресный вход блока формирования адреса - с вторыми входами измерителя рассогласования и второго сумматора.
ФигЗ
о
Фс. /
м„-; (
да:
, , #Ј и /
i-in.
ZV
S-Р-,лЈ
ь
;
А
€
/
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
