И:эобретенис относится к автоматичоскому управлению и может быть использовано в следящих системах, в KOTopbjx в качестве исполнительного двигателя используется пьезодвигатель,
Пьезодвигатели обладают высокой нагрузочной способностью до 3-4 кН, большой точностью позициониирования (noi-решность установки не превышает ±0,2 мкм при подаче соответствующего «управляющего воздействиями высоким быстродействием, позволяющим перемещать регулируемый объект с частотой 200-400 Гц.
Однако пьезодвигателям присущ характерный недостаток - наличие неоднозначной нелинейной статической характеристики в виде петли гистерезиса. Наличие элемента с такой характеристикой внутри контура, охваченного обратной связью, может вызывать автоколебания в следящем приводе.
Известны следяв;ие системы с компенсацией нелинейности типа люфт l
Недостатком известных следящих систем является невозможность ее построения при использовании в ней пьезодвигателя в качестве исполнительного двигателя, так как в силу конструктивных особенностей пьезодвигателя нельзя измерить параметры перемещения собственно исполнительного двигателя отдельно от нелинейного звена типа люфт.
. Наиболее близким по технической сущности к предложенному является следящий привод с коррекцией люфта, содержащий измеритель рассогласования, первый вход которого через датчик положения соединен с выходом объекта регулирования-, второй вход с выходом задающего устройства, а выход - с первым входом выходного сумматора, выход которого через последовательно соединенные усилитель и исполнительный двигатель соединен с вхО|Цом объекта регулирования 2J .
Принцип коррекции статической характеристики, использованной в известз ном следящем приводе основан на измерении скорости перемещения и положения исполнительного двигателя перед элементои, имеющим нелинейную статическую характеристику. При использовании пьезодвигателя такие измерения невозможны, так как нелинейность его статической характеристики обусловлена свойствами применяемого пьезоматериала и нельзя выделить точку для подключения датчика скорости между двигателем и элементом с нелинейной статической характеристикой.
Целью изобретения является повышение точности регулирования при использовании в качестве исполнительного двигателя пьезодвигателя за счет коррекции неоднозначности его статической характеристики.
Поставленная цель достигается тем что в следящий пьезопривод с коррекцией неоднозначной статической характеристики, содержащий измеритель рассогласования первый вход которого через датчик положения соединен с выходом объекта регулирования., второй вход - с выходом задающего устройства, а выход - с первым входом выходного сумматора, выход которого через последовательно соединенные усилитель и исполнительный двигатель соединен с входом объекта регулирования, введены корректирующие блоки, число которых на единицу меньше числа участков линейной аппроксимации статической характеристики пьезодвигателя, входы которы54 соединены с выходом измерителя рассогласования, а выходы корректирующих блоков соединены с соответствующим входом выходного сумматора, каждый корректирующий блок содержит нелинейный элемент и последовательно соединенные сумматор инвертирующий интегратор и масштабный блок 5 выход которого является выходом корректирукгщего блока, входом которого является первый вход сумматора, второй вход которого соединен с выходом нелинейного элемента, третий вход - с выходом инвертирующего интегратора, а выход - с входом нелинейного элемента.
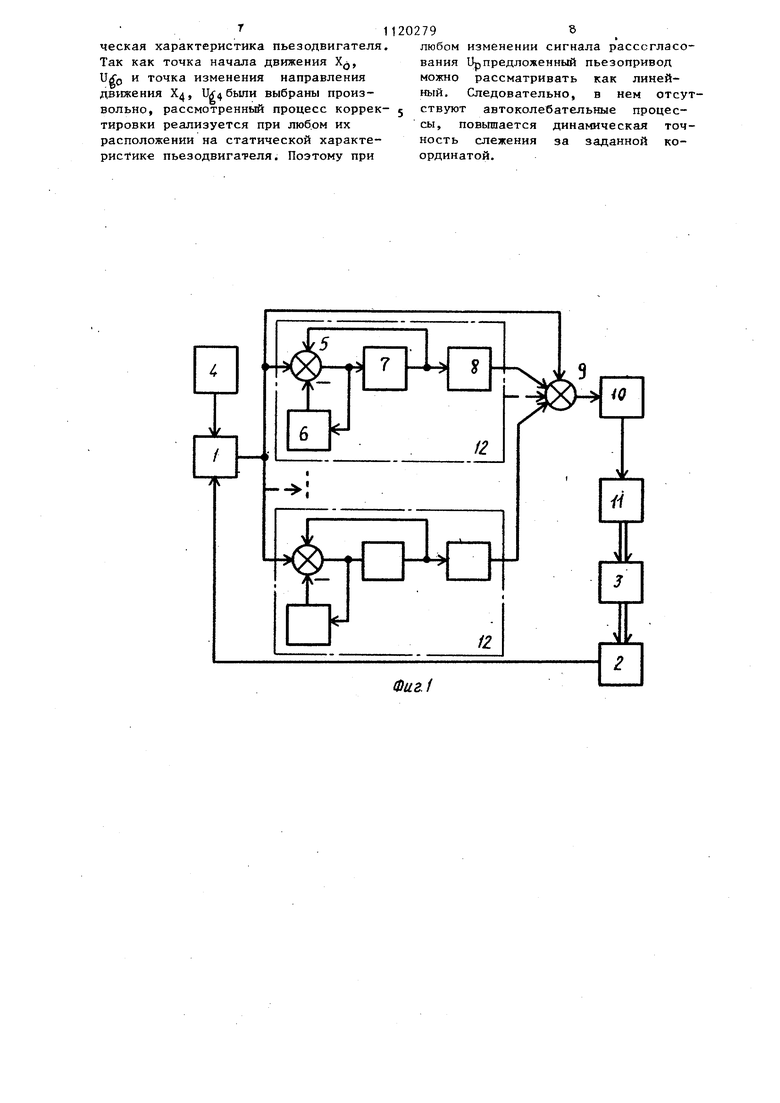
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 статическая характеристика пьезодвигателя и график связанного с ней напряжения, подаваемого в следящей системе на пьезодвигатель.
Устройство содержит измеритель 1 рассогласования, датчик 2 положения, объект 3 регулирования, задающее устройство 4, сумматоры 5, нелинейные элементы 6, инвертирующие интеграторы 7, масштабные блоки 8, выходной сумматор 9, усилитель 10, исполнительный двигатель 11, являющийся пьезодвигателем, корректирукнцие блоки 12. На Лиг, 2а н б введены следующие обозначения: X - перемещение рабочег органа пьезодвигателя; U - напряжение, приложенное к пьезодвигателю; Up - сигнал рассогласования. Следящий пьезопривод работает сле дующим образом. Положение объекта 3 регулирования измеряется датчиком 2 положения, выходной сигнал которого поступает в измеритель 1 рассогласования, где сравнивается с сигналом задающего устройства 4. Выходной сигнал Up измерителя рассогласования поступает на первые входы каждого из сумматоров 5. Сумматоры 5,нелинейные sjjeMeH ты 6, инвертирующие интеграторы 7, масштабные блоки 8, а также выходной сумматор 9 и усилитель 10 служат для формирования напряжения Urf, подаваемого в следящей системе на пьезодви гатель 11. Коэффициент передачи сово купности этих элементов следящей системы изменяет в зависимости от состояния пьезоэлектрического двигателя 11, определяемого точкой-на статической характеристике (фиг. 2а). В момент изменения знака сигнала рас согласования состояние пьезодвигател описывается начальной точкой XQ, UJQ на статической характеристике (фиг.2а) Характер нелинейности не зависит от положения тачки XQ, U, аполностью .определяется функцией F( и.ь/) , посто янной для данного типа пьезодвигателя описываемого формулой ,,/) Sign.X,,(1) X FC/Utf- и, В момент изменения знака скорости dx фиксируется новое пол- движения жение координат начальной точки Х , (для конкретной статической харак теристики на фиг. 2а XQ Х., uly и(,) . Коэффициент передачи пьезодв гателя 11, соответствующий начальному наклону кривой d ,Ь ,с у точки Х, , минимален. Поэтому требуетс чтобы коэффициент передачи группы элементов 5-10 был максимальным. С этой целью Коэффициент усиления усилителя 10 выбирается равным К - & Up,- Upo При этом сигналы на выходах инвер тирующих интеграторах 7 остаются неизменньгми. Сигнал выходного сумт-iaTOipa 9, усиленньш усилителем 10, подается на пьезодвигатель 11, вызывая перемещение объекта 3 регулирования из точки Хд в точку Х. Таким образом, на участке d Ь статической характеристики (фиг. 2а) при изменении сигнала рассогласования Up от Upg до Up, объект регулирования перемещается из точку Х, т.е. суммарньй точки Хд в наклон статической характеристики X.- Хс Х4- Ха Л,Г gr Ч Up,- Upo где Aj,- - коэффициент, определяющий средний наклон статической характеристики пьезодвигателя при максимальном изменении напряжения. При дальнейшем увеличении напряжения рассогласования увеличивается наклон статическо характеристики, поэтому коэффициент передачи группы элементов 5-10 должен уменьшаться. Это достигается в результате действия сумматоров 5, нелинейных элементов 6 и инвертирующих интеграторов 7. Статические характеристики нелинейных элементов 6 выбираются симметричными и описываются уравнением и„, при и„,(1) Up, (с)С„ при /UH, (t)/ : Upj(A) при Uj,,(t) i -Up; , где напряжение на выходе i-го нелинейного элемента 6 (i 1,2, ..., п); Uf,.- максимальное напряжение на выходе i-ro нелинейного элемента 6, при котором наступает ограничение выходного сигнала II; коэффициент передачи нелинейного элемента 6 при отсутствии ограничения; UM.CH приведенное к входу i-ro Ъ И-Сц сумматора 5 напряжение огра-ничения Ц В случае если выполняется условие /иц, (t) , на второй вход i-ro сумматора 5 поступает усиленный в С раз выходной сигнал. При этом коэффициент передачи сумматора 5 от первого входа к выходу уменьшается CM + 1 раз. Напряжение на выходе интегратора 7, вход которого подключен к выходу сумматора 5, в этом случае описывается уравнением
и СпЧ -
(5) Н-ИР Т(Сц+ 1)р+ 1
где Т - постоянная времени интегратора 7.
Так как коэффициент передачи нелинейного элемента Cj, может быть выбран достаточно большим, постоянная времени (С. -- 1)Т апериодического звена (5), замещающего элементы 5-7 будет большой и напряжение на выходе инвертирующего интегратора будет оставаться практически неизменным при быстром изменении сигнала Up. При этом скорость изменения выходного напряжения усилителя 10 определяется только сигналом, поступающим на п+1 вход выходного сумматора 9.
При увеличении сигнала рассогласования Up и, соответственно, при . невыполнении условия/U-(t)/ Up, выходной сигнал i-ro нелинейного элемента принимает значение 1); или -U|g,, , В этом случае 11апряжение на выходе i-ro интегратора 7 описывается уравнением
и.ул,- Up(p)
(6)
;
Тр + 1
При этом постоянная времени апериодического звена (6), замещающего эле менты 5-7 будет равна постоянной времени Т интегратора 7, т.е. в (Сц + 1) раз меньше, чем в случае (5) и присут ствует постоянная составляющая U,;. Переход групп элементов 5-7 i состоянию, описываемому уравнением (6), происходит последовательно. С этой целью статическая характеристика пьезодвигателя разбивается на линей ные отрезки, границы которых опреде ляются напряжением U,
На участке р{; статической характеристики (фиг, 2а) при изменении сиг нала рассогласования Up от Up2 первая группа элементов 5-7 переходит в состояние, описываемое уравнением (6). Это означает, что при быстром изменении сигнала рассогласования Up скорость изменения выходного сигнала первого интегратора 7 существенно не отличается от скорости изменения Up. Поступая на первый вход выходного сумматора 9, сигнал вызывает уменьшение скорости нарастания напряжения и , подаваемого на пьезодвига.тель 11 (оТре гок be фиг. 2б). Путем выбора коэффициента усиления С|. усилителя 8 с номером 1 1 по формуле
1-1
(7)
Тк
1 bi
обеспечивается движение регулируемого объекта из точки Х в точку Xg при изменении сигнала рассогласования от Up до Up 2 .
Таким образом, на отрезке обеспечивается корректировка нелинейности статической характеристики пьезодвигателя и достигается постоян- - dx
ство производной -jr- я А.. . КорректиdUp л
ровна статической характеристики пьезодвигателя на, остальных отрезках аппроксимирующей кривой производится аналогично, путем выбора коэффициентов усиления усилителей 8 по формуле (7) и выбора напряжений ограничения ид нелинейнЕЛх элементов.
При перемене знака скорости изменения сигнала рассогласования Up, т.е. при необходимости изменения направления движения регулируемого
объекта выходные напряжения U,,
теграторов / описываются уравнением (5). Следовательно, напряжения U(|; фиксируются на уровне, на котором они находились до момента перемены направления движения регулируемого объекта. При этом переход интеграторов 7 к состоянию, описываемому уравнением (6), происходит в том же порядке, что и при движении из точки Х,,5 Ь/ур, так как характеристика пьезодвигателя симметрична (1) и симметричны также характеристикинелинейных элементов 6(4).
Б этом случае на отрезкее f (фиг. 26) скорость изменения напряження и на пьезодвигателе 11 максимальна и определяется собственным коэффициентом передачи пьезодвигателя. Затем, как и в случае движения из точки Х0, Urfjj происходит поочередный переход интеграторов 7 к состоянию,, описываемому уравнением (6), и скорость изменения напряжения Uxдля каясдого последующего отрезка аппроксимации уменьшается. В результаdx
- А остается поте производная
dU
стоянной и при обратном движении пьезодвигателя. Из этого следует, что суммарная статическая характеристика пьезопривода становится линейной и однозначной, т.е. корректируется нелинейггая неоднозначная стати/ 1
ческая характеристика пьезодвигателя. Так как точка начала движения XQ, Urfo и точка изменения направления движения Х, Ш4были выбраны произвольно, рассмотренный процесс корректировки реализуется при любом их расположении на статической характеристике пьезодвигателя. Поэтому при
120279S
любом изменении сигнала рассогласования Црпредложенный пьезопривод можно рассматривать как линейный. Следовательно, в нем отсут5 ствуют автоколебательные процессы, повышается динамическая точность слежения за заданной координатой.

| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезопривод с коррекцией неоднозначной статической характеристики | 1988 |
|
SU1524022A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Следящая система | 1983 |
|
SU1142811A1 |
| Способ управления пьезодвигателем | 1986 |
|
SU1397872A1 |
| Устройство для воспроизведения неоднозначных функций типа петли гистеризиса | 1989 |
|
SU1718244A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |

СЛЕДЯЩИЙ ПЬЕЗОПРИВОД С КОРРЕКЦИЕЙ НЕОДНОЗНАЧНОЙ СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКИ, содержащий измеритель рассогласования, первый вход которого через датчик положения соединен с выходом объекта регулирования, второй вход - с выходом задающего устройства, а выход - с первым входом выходного сумматора, выход которого через последовательно соединенные усилитель и исполнительный двигатель соединен с входом объекта регулирования, отличающийся тем, что, с целью повьшения точности регулирования при использовании в качестве исполнительного двигателя пьезодвигателя за счет коррекции неоднозначности его статической характеристики, в него введены корректирующие блоки, число которых на единицу меньше числа участков линейной аппроксимации статической характеристики пьезот двигателя, входы которых соединены с выходом измерителя рассогласования, а выходы корректирующих блоков соединены с соответствующим входом выходного сумматора, каждый ко1 ректирунмцйй блок содержит нелинейный элемент и последовательно соединенные сумма(Л тор, инвертирующий интегратор и масштабный блок, выход которого является выходом корректирующего блока, входом которого является первый вход сумматора, второй вход которого соединен с выходом нелинейного элемента, третий вход - с выходом инвертирующего интегратора, а выход - с входом нелинейного элемента. ю э N3 :о
у / /о
/
I
11
I L Лzrl
V
.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
