Л
ю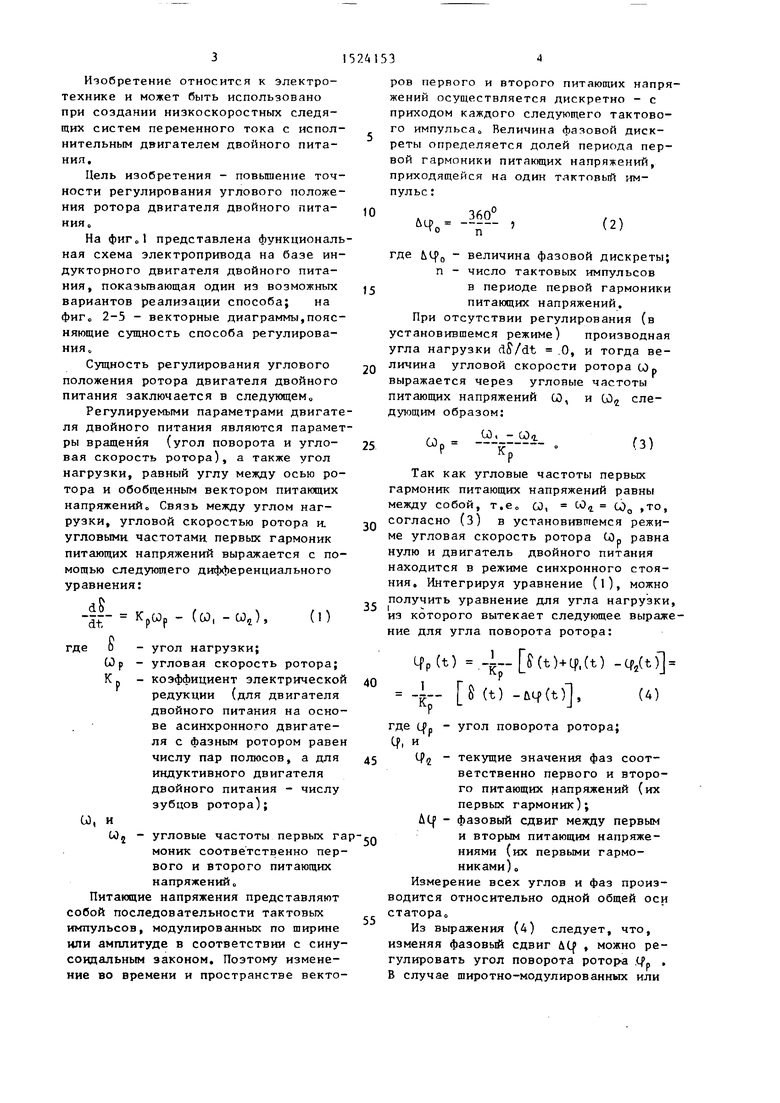
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1541752A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1436265A2 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1986 |
|
SU1372582A1 |
| Способ управления двигателем двойного питания | 1987 |
|
SU1515326A1 |
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2398349C1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
| Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе | 1987 |
|
SU1681371A1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1985 |
|
SU1310991A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
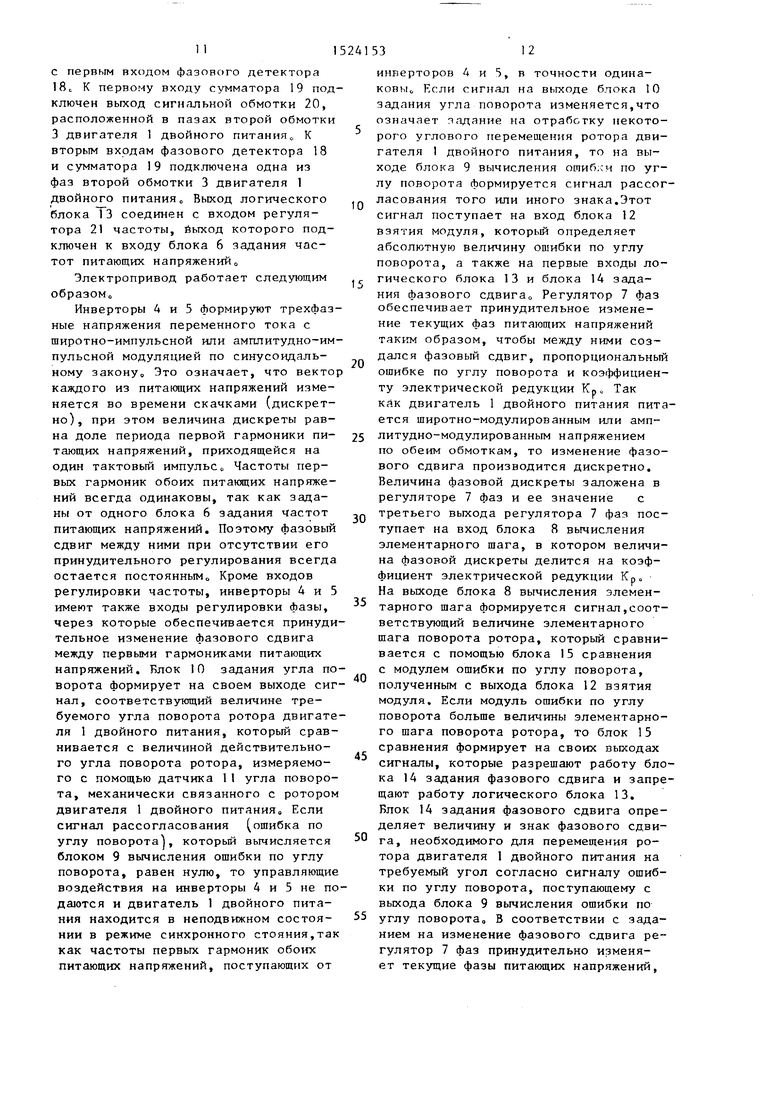
Изобретение относится к электротехнике и может быть использовано при создании низкоскоростных следящих систем переменного тока с исполнительным двигателем двойного питания. Целью изобретения является повышение точности регулирования углового положения ротора двигателя двойного питания. Существо способа заключается в том, что на многофазные обмотки 2 и 3 двигателя двойного питания 1 подают питающие напряжения одинаковой частоты и для регулирования углового положения ротора изменяют дискретно фазовый сдвиг между этими напряжениями и дополнительно частоты напряжений в пределах элементарного шага поворота ротора по результатам сравнения модуля ошибки по углу поворота с вычисленной величиной элементарного шага. 1 з.п. ф-лы. 5 ил.
ел
00
фие.1
Изобретение относится к электротехнике и может бь1ть использовано при создании низкоскоростньтх следящих систем переменного тока с исполнительным двигателем двойного питания.
Цель изобретения - повышение точности регулирования углового положения ротора двигателя двойного пита-
НИЯо
На фиго представлена функциональная схема электропривода на базе индукторного двигателя двойного питания, показьгеающая один из возможных вариантов реализации способа; на фиГо 2-5 - векторные диаграммы,поясняющие сущность способа регулирования.
Сущность регулирования углового положения ротора двигателя двойного питания заключается в следующем.
Регулируемыми параметрами двигателя двойного питания являются параметры вращения (угол поворота и угло- вая скорость ротора), а также угол нагрузки, равный углу между осью ротора и обобщенным вектором питающих напряжений. Связь между углом нагрузки, угловой скоростью ротора R угловыми частотами первых гармоник питающих напряжений выражается с помощью следуюгаего дифференциального уравнения:
ft
где О - угол нагрузки;
СО р - угловая скорость ротора; Кр - коэффициент электрической редукции (для двигателя двойного питания на основе асинхронного двигателя с фазным ротором равен числу пар полюсов, а для индуктивного двигателя двойного питания - числу зубцов ротора); СО, и
Wj - угловые частоты первых га МОНИК соответственно первого и второго питающих напряженийо
Питающие напряжения представляют собой последовательности тактовых импульсов, модулированных по ширине или амплитуде в соответствии с синусоидальным законом. Поэтому изменение во времени и пространстве векторов первого и второго питающих напряжений осуществляется дискретно - с приходом каждого следующего тактового импульса Величина фазовой дискреты определяется долей периода первой гармоники питающих напряжений, приходящейся на один тактовый импульс :
vO
36р
п
5
(2)
где bCfo - величина фазовой дискреты; п - число тактовых импульсов в периоде первой гармоники питающих напряжений. При отсутствии регулирования (в установившемся режиме) производная угла нагрузки els /lit .0, и тогда величина угловой скорости ротора сОр выражается через угловые частоты питающих напряжений СО, и СО следующим образом:
СО, - 00-2.
к7
(3)
Р
Так как угловые частоты первых гармоник питающих напряжений равны между собой, т,е„ СО, tO СО ,то, согласно (З) в установившемся режиме угловая скорость ротора СО. равна нулю и двигатель двойного питания находится в режиме синхронного стояния. Интегрируя уравнение (l), можно получить уравнение для угла нагрузки из которого вытекает следующее выражние для угла поворота ротора:
q)p(t) (t)+q .(t) -(f,(t -1- S (t) -u4 (t). (4)
где cfp - угол поворота ротора; Cf, и
- текущие значения фаз соответственно первого и второго питающих напряжений (их первых гармоник); ДЦ - фазовый сдвиг между первым и вторым питающим напряжениями (их первыми гармониками) о
Измерение всех углов и фаз производится относительно одной общей оси статорао
Из выражения (4) следует, что, изменяя фазовьй сдвиг ЛС , можно регулировать угол поворота ротора .Lf. , В случае широтно-модулированных или
515241
амплитудно-модулировэнных питающих напряжений изменение фазового сдвига между ними возможно только с дискретностью, определяемой выражением (2)„ Поэтому перемещение ротора дви- гателя двойного питания в этом случае также будет дискретным с величиной элементарного шага
. . (3,
к
Р
где в6 величина элементарного шага поворота ротора
Величина элементарного шага по- ворота ротора oi. во многих практических случаях весьма мала, однако все же конечна и определяет предел точности позиционирования двигателя двойного питания В предлагаемом способе предусмотрена возможность регулирования углового положения ротора в пределах элементарного шага поворота ротора за счет изменения угла нагрузки при изменении частот первых гармоник питающих напряжений
Когда от внешнего источника задающего сигнала приходит задание переместить ротор двигателя двойного питания на некоторый требуемый угол, система управления электроприводом изменяет фазовый сдвиг пропорционально требуемому углу поворота и коэффициенту электрической редукции с дискретностью, соответствующей выражению (.) Ротор двигателя начинает перемещать- ся с дискретностью, определяемой выражением (5)о В первый момент регулирования ошибка по углу поворота имеет наибольшее значение, но в процессе перемещения ротора она уменьшается. В какой-то момент времени модуль ошибки по углу поворота становится меньше величины элементарного шага ci,, определяемого выражением (з), и тогда изменение фазового сдвига даже на одну дискрету (а меньшее изменение фазового сдвига невозможно) приведет к проскакиванию ротором заданного углового положения Поэтому в этот
момент прекращают изменение фазового сдвигао Согласно выражению (4) угол поворота ротора определяется не только величиной фазового сдвига ДЦ , но и величиной угла нагрузки S ,который равен углу между осью ротора и обобщенным вектором питакмцего напряжения. Понятие обобщенного вектора питающего напряжения в случае двига
, 0 5
Q с Q
0
53
теля двойного питания имеет следуто- щий смысЛо Фактически существуют два вектора питающих напряжений - вектор первого питающего напряжения и вектор второго питающего напряжения,образованные многофазными системами питания соответственно первой и второй многофазных обмоток двигателя двойного питания. Каждый из этих векторов напряжения создает свой вектор тока, а вектор тока - магнитодвижущую силу (МДС) соответствующей обмотки Любое перемещение ротора осуществляется в конечном счете вследствие совместного действия этих МДС. Поскольку магнитное поле едино, то суммарное поле, образованное от. двух различных первичных источников - векторов первого и второго питающих напряжений - можно представить как поле, созданное одним условным источником - обобщенным вектором питающих напряжений Угловое положение обобщенного вектора питающих напряжений равно фазовому сдвигу &1| , а угловая скорость перемещения в пространстве равна разности углвовых скоростей векторов первого и второго питающих напряжений.
Если величина наименьщего возможного приращения фазового сдвига (фазовой дискреты) оказывается больше необходимого для точного дорегули- угла поворота ротора, то для этих целей используют зависимость угла нагрузки от частот первых гармоник питающих напряжений, которая имеет следующий вид:
С/. . Г WiCOT. 6L,L7 ., ., |
b(t) arcsin -т.--- arcsin
(t)6L,L7
oro:
2K,
t«..r,
- m
Л
. (6)
где СОд - частота первых
гармоник питающих напряжений с учетом того, 4TO(j, ; и, и Ui - амплитуды соответственно первого и второго питающих напряжений (их первых гармоник) ;
L ( и
Lj - индуктивности соответственно первой и второй обмоток двигателей двойного питания; L - взаимная индуктивность между первой и второй обмотками двигателя двойного питания;
Ъ,Ц;
М - статический момент на ралу
двигателя;
коэффициент пропорциональ- ности, зависящий от коэффициента электрической редукции, числа фаз обмоток и системы используемых единиц Из вьфажения (6) следует, что,из- меняя частоты первых гармоник питающих напряжений, можно регулировать угол нагрузки S и в конечном счете угол поворота ротора в соответствии с выражением (4)о Изменять час- тоты первых гармоник питающих напряжений следует на одинаковую величину, чтобы двигатель двойного питания все время оставался в режиме синхронного стояния При наличии кон- тура отрицательной обратной связи по углу поворота величина изменения частот первых гармоник питающих напряжений всегда автоматически выбрана точной такой, чтобы свести ощибку по углу поворота к нулю Это обеспечивается самим принципом регулирования по
отклонению
Однако в двигателе двойного питания угол нагрузки может иметь раэлич ный знак в зависимости от знака статического момента на валу двигателя Это означает, что в некоторых случаях возможно изменение знака обратной связи по углу поворота - вместо стабилизирующей отрицательной обратная связь может стать дестабилизирующей положительной и двигатель станет неуправляемым Рассматриваемый способ предусматривает меры, исключаю- щие такую возможность
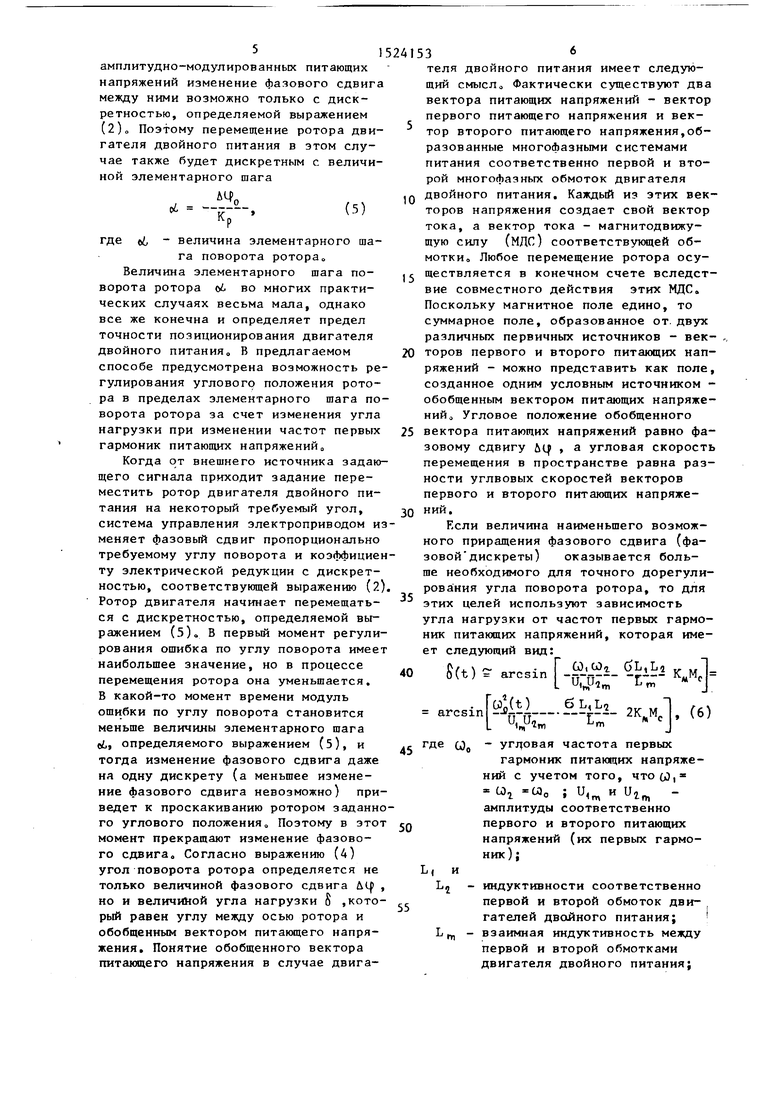
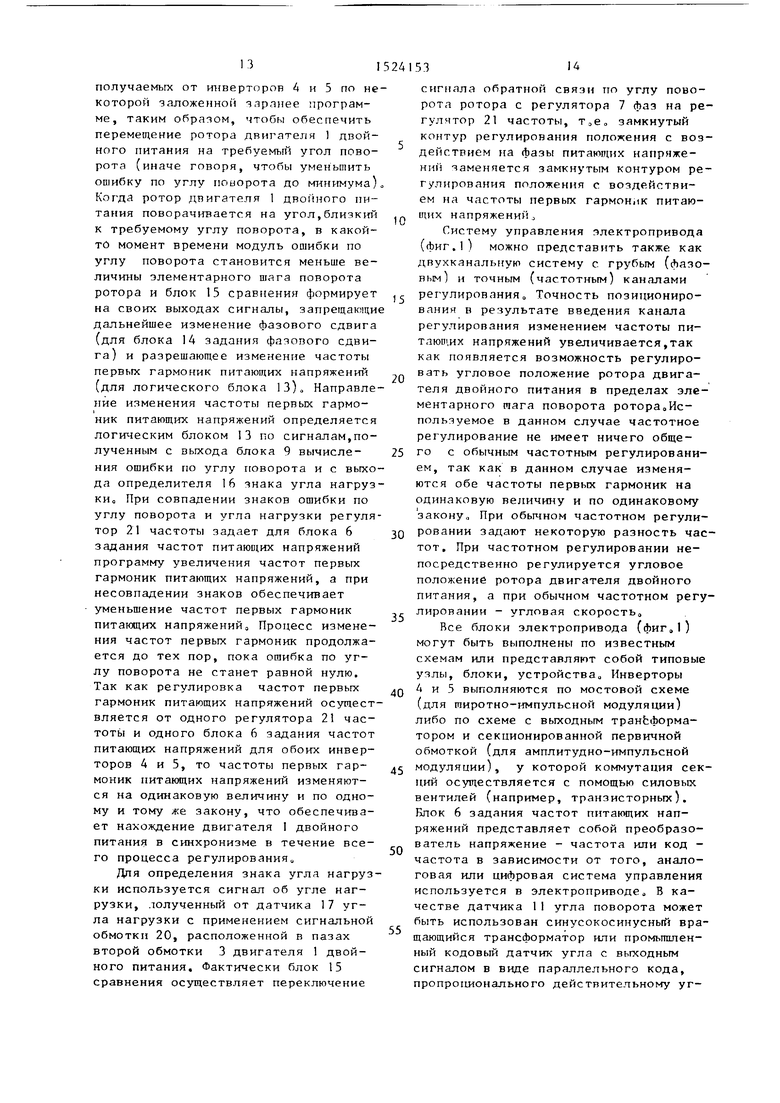
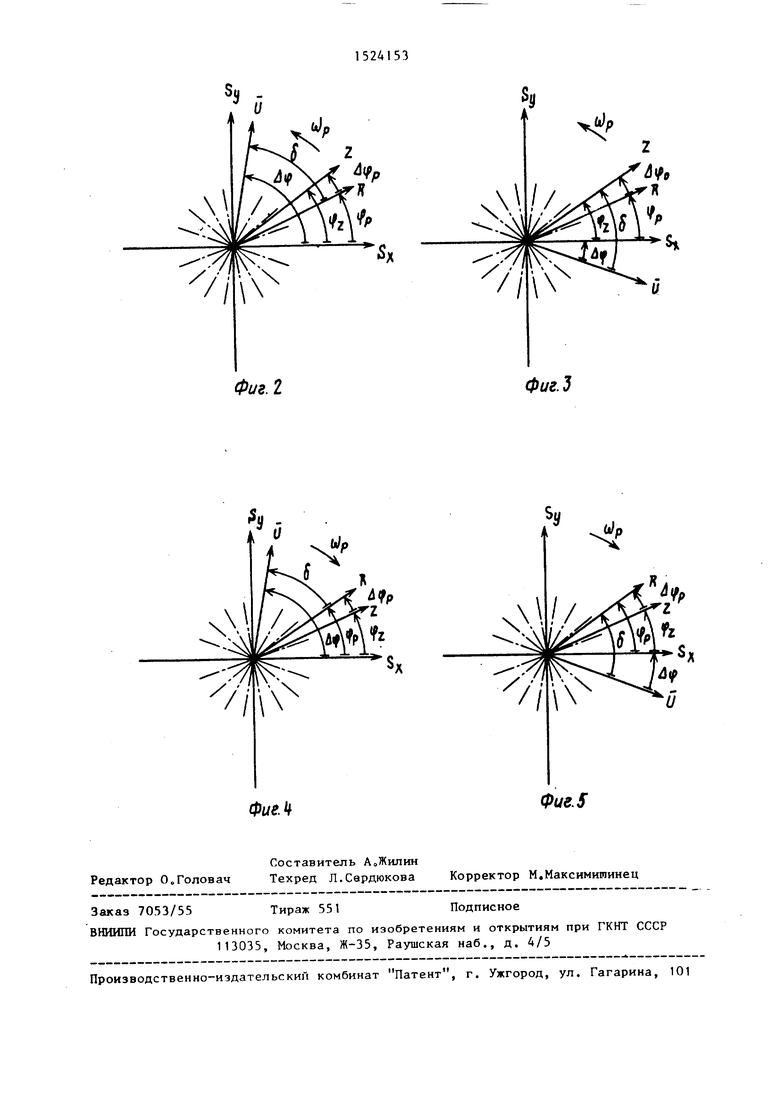
Чтобы определить направление изменения частот первых гармоник питающих напряжений измеряют знак угла нагрузки и сравнивают его со знаком ошибки по углу поворота. Алгоритм определения направления изменения частот первых гармоник питающих напряжения иллюстрируется векторными диаграммами ()„ На диаграммах в осях S 51 связанных со статором, показаны U - обобщенный вектор питающих напряжений; R - действительное положение оси ротора; 7, - требуемое положение оси ротора; 5 - угол нагрузки; Cf. - требуемый угол поворота; Ц р - действительный угол поворота; (п- ошибка по углу
поворота; д.ср - угол поворота обобщенного вектора питающих напряжений (фазовый сдвиг) о 1Чтрихпунктирными линиями показаны возможные положения обобг енного вектора питающих напряжений U, обусловленные применением широтной или амплитудной модуляции по синусоидальному закону Каких-то промежуточных положений вектор U занимать не может Для конкретности число тактовых импульсов в периоде первых гармоник питающих напряжений принято равным п 18, а коэффициент электрической редукции -„ 1 R этом случае величина фазовой дискреты в соответствии с выражением (2)
&Ч)„ 20°, .
а величина элементарного шага поворота ротора равна величине фазовой дискреты
На фиг 2-5 показано положение ротора двигателя двойного питания и обобщенного вектора напряжения U в тот момент, когда величина модуля ошибки по углу поворота /utppj стала меньше величины элементарного шага поворота ротора oi- , который в данном конкретном случае равен фазовой дискрете (так как коэффициент электрической редукции Кр О Видно,что, если переместить вектор U еще на одну дискрету, то ось ротора R проскочит требуемое угловое положение (ось Z; Поэтому прекращают изменение фазового сдвига (перемещение обобщенного вектора питающих напряжений U) и начинают изменять частоту первых гармоник питающих напряжений СЭд „Для определения направления изменения частоты QO сравнивают знак ошибки по углу поворота, которую определяют согласно выражению
Щ Ч г - Ч р
(7)
со знаком угла нагрузки, который вычисляют по формуле
(р - Atf . (8)
Возможны различные сочетания знаков в зависимости от направления перемещения ротора двигателя и знака статического момента на валу
На показан случай, когда перемещение ротора происходит в положительном направлении (против часовой стрелки) Статический момент на валу двигателя является тормозным и действует в отрицательном направлении (по часовой стрелке).
В этом случае ошибка по углу поворо- та uqjp всегда положительна, а угол нагрузки о отрицателен о Из диаграммы (фиг„2) следует, что для дотягивания ротора до требуемого угло- вого положения (ось 7,) следует уменьшить угол нагрузки 8 , что обеспечивается в соответствии с выражением (б) уменьшением частоты первых гармоник питающих напряжений
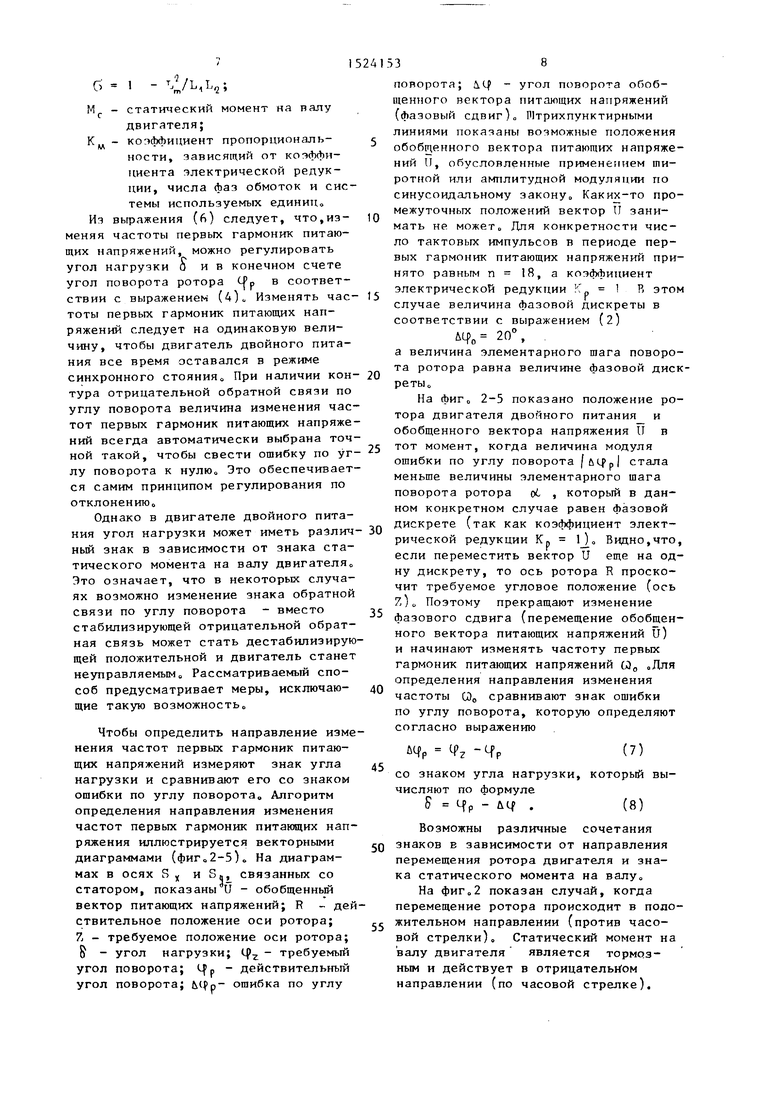
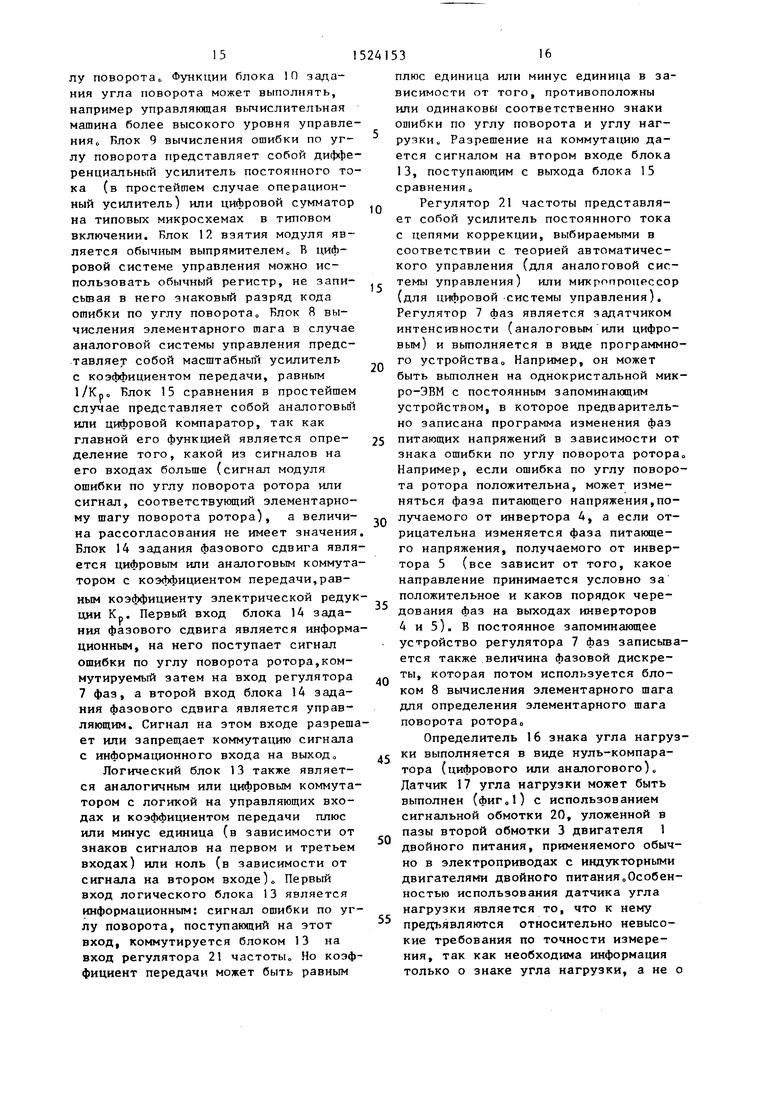
оНа фиг„3 показан случай, когда перемещение ротора происходит, как и в предыдущем случае, в положительном направлении (против часовой стрелки), а статический момент на валу двигателя является вращающим и действует в положительном направлении (против часовой стрелки), в отличие от предыдущего случая о При этом ошибка по углу поворота ACf всегда положительна, как и в предыдущем случае, а угол нагрузки, в отличие от предыдущего случая, также положителен, Из диаграммы (фиГоЗ) следует, что для дотягивания ротора до требуемого углового положения (ось Z) необходимо увеличить угол нагрузки S , что обеспечивается в соответствии с выражением (б) увеличением частоты первых гармоник питающих напряжений ОЗо
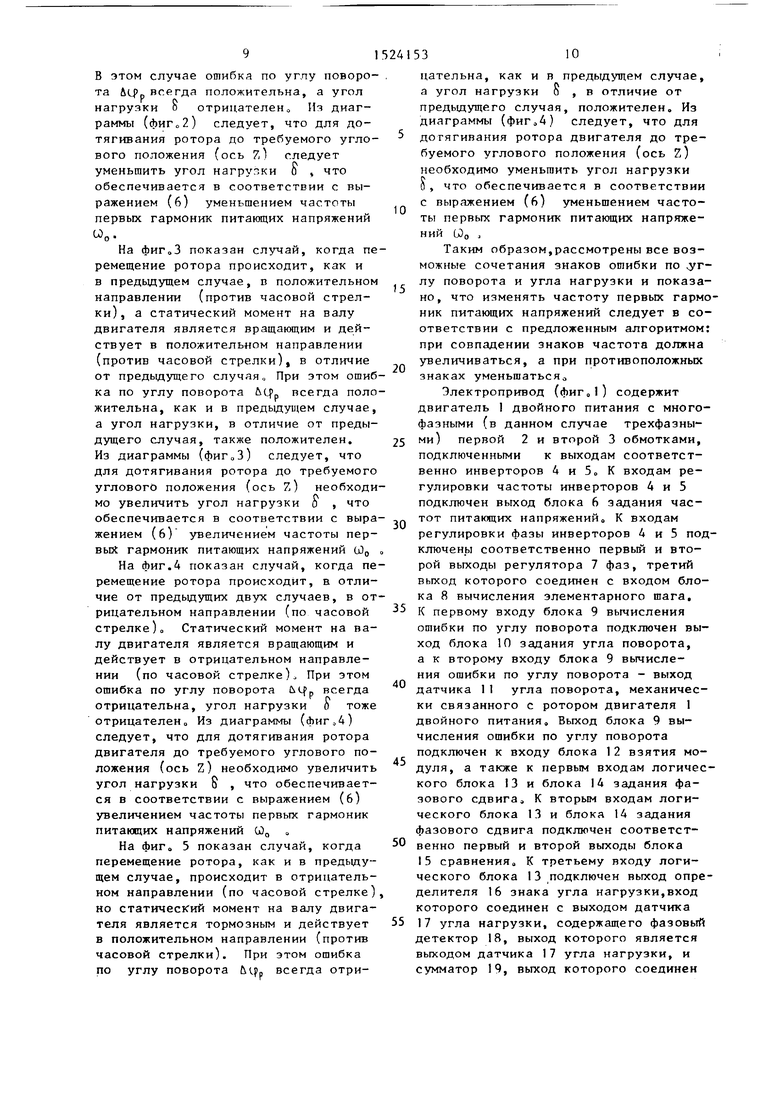
На фиг.4 показан случай, когда перемещение ротора происходит, в отличие от предыдущих двух случаев, в отрицательном направлении (по часовой стрелке) Статический момент на валу двигателя является вращающим и действует в отрицательном направлении (по часовой стрелке)о При этом ошибка по углу поворота Citfp всегда отрицательна, угол нагрузки и тоже отрицателен о Из диаграммы (фиг,4) следует, что для дотягивания ротора двигателя до требуемого углового положения (ось Z) необходимо увеличить угол нагрузки S , что обеспечивается в соответствии с выражением (б) увеличением частоты первых гармоник питающих напряжений Wg „
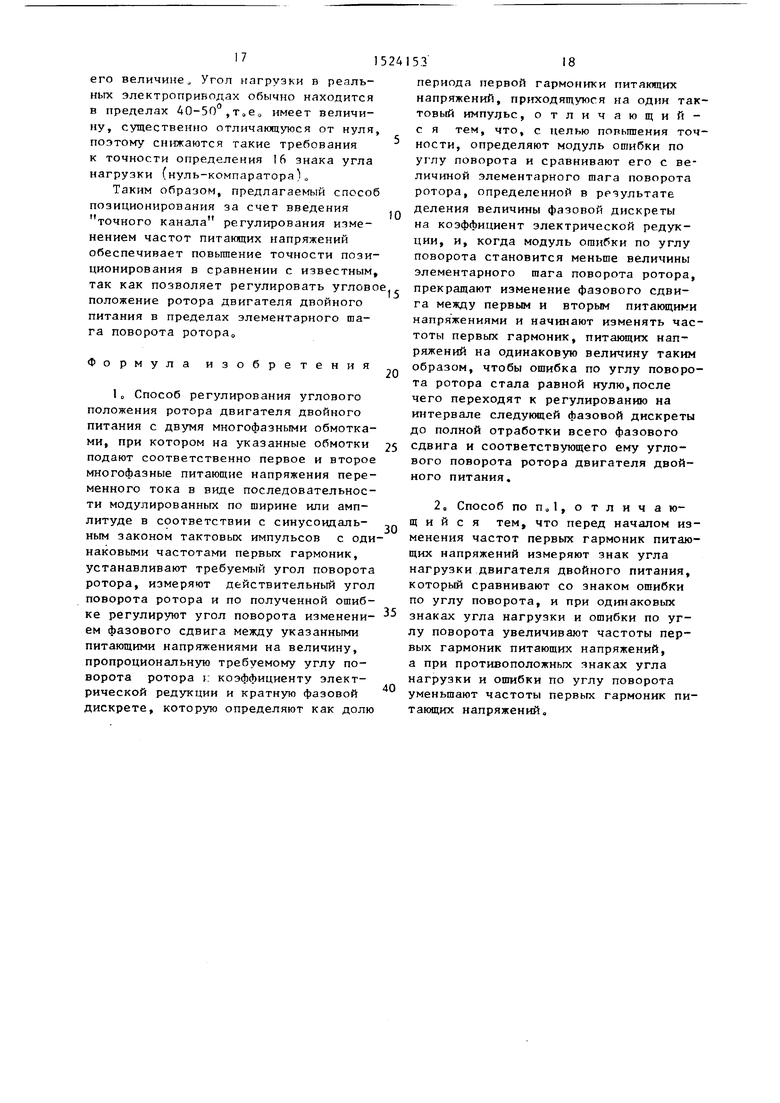
На фиГо 5 показан случай, когда перемещение ротора, как и в предыдущем случае, происходит в отрицательном направлении (по часовой стрелке но статический момент на валу двигателя является тормозным и действует в положительном направлении (против часовой стрелки). При этом ошибка по углу поворота tupp всегда отри
5
0
5
0 5
0
0
цательна, как и в предыдущем случае, а угол нагрузки о , в отличие от предыдущего случая, положителен. Из диаграммы (фиг«4) следует, что для дотягивания ротора двигателя до требуемого углового положения (ось Z) необходимо уменьшить угол нагрузки и, что обеспечивается в соответствии с выражением (б) уменьшением частоты первых гармоник питающих напряжений Qg ,
Таким образом,рассмотрены все возможные сочетания знаков ошибки по углу поворота и угла нагрузки и показано, что изменять частоту первых гармоник питающих напряжений следует в соответствии с предложенным алгоритмом: при совпадении знаков частота должна увеличиваться, а при противоположных знаках уменьшаться
Электропривод (фиг) содержит двигатель 1 двойного питания с многофазными (в данном случае трехфазными) первой 2 и второй 3 обмотками, подключенными к выходам соответственно инверторов 4 и 5, К входам регулировки частоты инверторов 4 и 5 подключен выход блока 6 задания частот питающих напряжений К входам регулировки фазы инверторов 4 и 5 подключены соответственно первый и второй выходы регулятора 7 фаз, третий выход которого соединен с входом блока 8 вычисления элементарного шага, К первому входу блока 9 вычисления ошибки по углу поворота подключен выход блока 10 задания угла поворота, а к второму входу блока 9 вычисления ошибки по углу поворота - выход датчика 11 угла поворота, механически связанного с ротором двигателя 1 двойного питания. Выход блока 9 вычисления ошибки по углу поворота подключен к входу блока 12 взятия модуля, а также к первым входам логического блока 13 и блока 14 задания фазового сдвига, К вторым входам логического блока 13 и блока 14 задания фазового сдвига подключен соответственно первый и второй выходы блока 15 сравнения, К третьему входу логического блока 13 подключен выход определителя 16 знака угла нагрузки,вход которого соединен с выходом датчика 17 угла нагрузки, содержащего фазовый детектор 18, выход которого является выходом датчика 17 угла нагрузки, и сумматор 19, выход которого соединен
с первым входом фазового детектора 18с К первому входу сумматора 19 подключен выход сигнальной обмотки 20, расположенной в пазах второй обмотки 3 двигателя 1 двойного питания К вторым входам фазового детектора 18 и сумматора 19 подключена одна из фаз второй обмотки 3 двигателя 1 двойного питания о Выход логического блока ТЗ соединен с входом регулятора 21 частоты, ёыход которого подключен к входу блока 6 задания частот питающих напряжений
Электропривод работает следующим образомо
Инверторы 4 и 5 формируют трехфазные напряжения переменного тока с широтно-импульсной или амплитудно-импульсной модуляцией по синусоидальному закону Это означает, что вектор каждого из питавощих напряжений изменяется во времени скачками (дискретно), при этом величина дискреты равна доле периода первой гармоники питающих напряжений, приходящейся на один тактовый импульс Частоты первых гармоник обоих питающих напряжений всегда одинаковы, так как заданы от одного блока 6 задания частот питающих напряжений. Поэтому фазовый сдвиг между ними при отсутствии его принудительного регулирования всегда остается постоянным Кроме входов регулировки частоты, инверторы 4 и 5 имеют также входы регулировки фазы, через которые обеспечивается принудительное изменение фазового сдвига между первыми гармониками питающих напряжений. Блок 10 задания угла поворота формирует на своем выходе сигнал, соответствующий величине требуемого угла поворота ротора двигателя 1 двойного питания, который сравнивается с величиной действительного угла поворота ротора, измеряемого с помощью датчика I1 угла поворота, механически связанного с ротором двигателя 1 двойного питания Если сигнал рассогласования (ощибка по углу поворота, которьй вычисляется блоком 9 вычисления ошибки по углу поворота, равен нулю, то управляющие воздействия на инверторы 4 и 5 не подаются и двигатель 1 двойного питания находится в неподвижном состоянии в режиме синхронного стояния,так как частоты первых гармоник обоих питающих напряжений, поступающих от
0
5
0
5
0
5
0
5
инверторов 4 и 5, в точности одина- ковыо Если сигнал на выходе блока 10 задания угла поворота изменяется,что означает падание на отработку некоторого углового перемещения ротора двигателя 1 двойного питания, то на выходе блока 9 вычисления отибхи по углу поворота формируется сигнал рассогласования того или иного знака.Этот сигнал поступает на вход блока 12 взятия модуля, который определяет абсолютную величину ошибки по углу поворота, а также на первые входы логического блока 13 и блока 14 задания фазового сдвига Регулятор 7 фаз обеспечивает принудительное изменение текущих фаз питaющ гx напряжений таким образом, чтобы между ними создался фазовый сдвиг, пропорциональный ошибке по углу поворота и коэффициенту электрической редукции Кр„ Так кик двигатель 1 двойного питания питается широтно-модулированным или амп- литудно-модулированным напряжением по обеим обмоткам, то изменение фазового сдвига производится дискретно. Величина фазовой дискреты заложена в регуляторе 7 фаз и ее значение с третьего выхода регулятора 7 фаз поступает на вход блока 8 вычисления элементарного щага, в котором величина фазовой дискреты делится на коэффициент электрической редукции Кро На выходе блока 8 вычисления элементарного щага формируется сигнал,соответствующий величине элементарного щага поворота ротора, который сравнивается с помощью блока 15 сравнения с модулем ошибки по углу поворота, полученным с выхода блока 12 взятия модуля. Если модуль ошибки по углу поворота больше величины элементарного щага поворота ротора, то блок 15 сравнения формирует на своих выходах сигналы, которые разрешают работу блока 14 задания фазового сдвига и запрещают работу логического блока 13. Блок 14 задания фазового сдвига определяет величину и знак фазового сдвига, необходимого для перемещения ротора двигателя 1 двойного питания на требуемый угол согласно сигналу ошибки по углу поворота, поступающему с выхода блока 9 вычисления ошибки по углу поворота В соответствии с заданием на изменение фазового сдвига регулятор 7 фаз принудительно изменяет текущие фазы питающих напряжений.
получаемьгх от инверторов 4 и 5 по некоторой заложенной зарп}1ее программе, таким образом, чтобы обеспечить перемещение ротора двигателя 1 двойного питания на требуемьй угол поворота (иначе говоря, чтобы уменьшить ошибку по углу поворота до г - нимума) Когда ротор двигателя 1 двойного питания поворачивается на угол,близкш1 к требуемому углу поворота, в какой- то момент времени модуль ошибки по углу поворота становится меньше величины элементарного шага поворота ротора и блок 15 сравнения формирует на своих выходах сигналы, запрещающи дальнейшее изменение фазового сдвига (для блока 14 задания фазового сдвига) и разрешающее изменение частоты первых гармоник питающих напряжений (для логического блока 13)„ Направление изменения частоты первых гармоник питающих напряжений определяется логит 1еским блоком 13 по сигналам,полученным с выхода блока 9 вычисле- ния ошибки по углу поворота и с выхода определителя 16 знака угла нагрузки При совпадении знаков ошибки по углу поворота и угла нагрузки регулятор 21 частоты задает для блока 6 задания частот питаюп1,их напряжений программу увеличения частот первых гармоник питающих напряжений, а при несовпадении знаков обеспечивает уменьшение частот первых гармоник питающих напряжений;, Процесс изменения частот первых гармоник продолжается до тех пор, пока ошибка по углу поворота не станет равной нулю. Так как регулировка частот первых гармоник питающих напряжений осуществляется от одного регулятора 21 частоты и одного блока 6 задания частот питающих напряжений для обоих инверторов 4 и 5, то частоты первых гар- МОНИК питающих напряжений изменяются на одинаковую величину и по одному и тому же закону, что обеспечивает нахождение двигателя I двойного питания в синхронизме в течение всего процесса регулирования
Для определения знака угла нагрузки используется сигнал об угле нагрузки, полученный от датчика 17 угла нагрузки с применением сигнальной обмотки 20, расположенной в пазах второй обмотки 3 двигателя 1 двойного питания. Фактически блок 15 сравнения осуществляет переключение
,, , „ 5 О Q
5
0
5
сигнала обратной связи по углу поворота ротора с регулятора 7 фаз на регулятор 21 частоты, , замкнутый контур регулирования положения с воздействием на фазы питающих напрчже- ниГ) заменяется замкнутым контуром регулирования положения с воздействием на частоты первых гармоник питающих напряжениГ) J
Систему управления электропривода (фиг.1) можно представить также как двухканальную систему с грубым (фазовым) и точным (частотным) каналами регулирования о Точность позиционирования в результате введения канала регулирования изменением частоты пи- таюп1.их напряжений увеличивается,так как появляется возможность регулировать угловое положение ротора двигателя двойного питания в пределах элементарного тага поворота ротораоИс- пользуемое в данном случае частотное регулирование не имеет ничего общего с обычным частотным регулированием, так как в данном случае изменяются обе частоты первых гармоник на одинаковую величину и по одинаковому закону. При обычном частотном регулировании задают некоторую разность частот. При частотном регулировании непосредственно регулируется угловое положение ротора двигателя двойного питания, а при обычном частотном регулировании - угловая скоростЬо
Все блоки электропривода (фиг,1) могут быть выполнены по известным схемам или представляют собой типовые узлы, блоки, устройства Инверторы 4 и 5 выполняются по мостовой схеме (для широтно-импульсной модуляции) либо по схеме с выходным транЬформа- тором и секционированной первичной обмоткой (для амплитудно-импульсной модуляции), у которой коммутация секций осуществляется с помощью силовых вентилей (например, транзисторных). Клок 6 задания частот питающих напряжений представляет собой преобразователь напряжение - частота или код - частота в зависимости от того, аналоговая или цифровая система управления используется в электроприводе В качестве датчика 11 угла поворота может быть использован синусокосинусный вращающийся трансформатор или промьшшен- ный кодовый датчик угла с выходным сигналом в виде параллельного кода, пропро1шонального действительному уг
15
лу поворотЗо функции блока 1П задания угла поворота может выполнять, например управляющая вычислительная машина более высокого уровня управления „ Блок 9 вычисления ошибки по углу поворота представляет собой дифференциальный усилитель постоянного тока (в простейшем случае операционный усилитель) или цифровой сумматор на типовых микросхемах в типовом включении. Блок 17. взятия модуля является обычным выпрямителем, В цифровой системе управления можно использовать обычный регистр, не запи- сьшая в него знаковый разряд кода ошибки по углу поворота Блок 8 вычисления элементарного шага в случае аналоговой системы управления представляет собой масштабньй усилитель с коэффициентом передачи, равным 1/Кр„ Блок 15 сравнения в простейшем случае представляет собой aнaпoгoвьri или цифровой компаратор, так как главной его функцией является определение того, какой из сигналов на его входах больше (сигнал модуля ошибки по углу поворота ротора или сигнал, соответствующий элементарному шагу поворота ротора), а величина рассогласования не имеет значения Блок 14 задания фазового сдвига является цифровым или аналоговым коммуттором с коэффициентом передачи,равным коэффициенту электрической редуции Кр. Первьй вход блока 14 задания фазового сдвига является информционным, на него поступает сигнал ошибки по углу поворота ротора,коммутируемый затем на вход регулятора 7 фаз, а второй вход блока 14 задания фазового сдвига является управляющим. Сигнал на этом входе разрешет или запрещает коммутацию сигнала с информационного входа на выход
Логический блок 13 также является аналогичным или цифровым коммутатором с логикой на управляющих входах и коэффициентом передачи плюс или минус единица (в зависимости от знаков сигналов на первом и третьем входах) или ноль (в зависимости от сигнала на втором входе) Первый вход логического блока 13 является информационным: сигнал ошибки по углу поворота, поступающий на этот вход, коммутируется блоком 13 на вход регулятора 21 частоты Но коэффициент передачи может быть равным
16
0
5
0
5
0
5
0
5
плюс единица или минус единица в зависимости от того, противоположны или одинаковы соответственно знаки ошибки по углу поворота и углу нагрузки Разрешение на коммутацию дается сигналом на втором входе блока 13, поступающим с выхода блока 15 сравнения
Регулятор 21 частоты представляет собой усилитель постоянного тока с цепями коррекции, выбираемыми в соответствии с теорией автоматического управления (для аналоговой системы управления) или микропротгессор (для цифровой системы управления). Регулятор 7 фаз является задятчиком интенсивности (аналоговым или цифровым) и выполняется в виде программного устройства Например, он может быть вьтолнен на однокристальной микро-ЭВМ с постоянным запоминающим устройством, в которое предварительно записана программа изменения фаз питающих напряжений в зависимости от знака ошибки по углу поворота ротора Например, если ошибка по углу поворота ротора положительна, может изменяться фаза питающего напряжения,получаемо го от инвертора 4, а если отрицательна изменяется фаза питающего напряжения, получаемого от инвертора 5 (все зависит от того, какое направление принимается условно за положительное и каков порядок чередования фаз на выходах инверторов 4 и 5). В постоянное запоминающее устройство регулятора 7 фаз записьша- ется также величина фазовой дискреты, которая потом используется блоком 8 вычисления элементарного шага для определения элементарного шага поворота ротора
Определитель 16 знака угла нагрузки выполняется в виде нуль-компаратора (цифрового или аналогового) Датчик 17 угла нагрузки может быть вьтолнен (фиг,) с использованием сигнальной обмотки 20, уложенной в пазы второй обмотки 3 двигателя 1 двойного питания, применяемого обычно в электроприводах с индукторными двигателями двойного питания Особенностью использования датчика угла нагрузки является то, что к нему предаявляются относительно невысокие требования по точности измерения, так как необходима информация только о знаке угла нагрузки, а не о
его величине Угол нагрузки в реальных электроприводах обычно находится в пределах 40-50 имеет величину, существенно отличающуюся от нуля, поэтому снижаются такие требования к точности определения 16 знака угла нагрузки (нуль-компаратора)о
Таким образом, предлагаемый способ позиционирования за счет введения точного канала регулирования изменением частот питающих напряжений обеспечивает повышение точности позиционирования в сравнении с известным, так как позволяет регулировать углово положение ротора двигателя двойного питания в пределах элементарного шага поворота ротора
Формула изобретения
1„ Способ регулирования углового положения ротора двигателя двойного питания с двумя многофазными обмотками, при котором на указанные обмотки подают соответственно первое и второе многофазные питающие напряжения переменного тока в виде последовательности модулированных по ширине или амплитуде в соответствии с синусокдаль- ным законом тактовых импульсов с одинаковыми частотами первых гармоник, устанавливают требуемый угол поворота ротора, измеряют действительный угол поворота ротора и по полученной ошибке регулируют угол поворота изменени ем фазового сдвига между указанными питающими напряжениями на величину, пропроциональную требуемому углу поворота ротора i: коэффициенту электрической редукции и кратную фазовой дискрете, которую определяют как долю
.-
е.,
20
30
25
35
40
периода первой гармоники питающих напряжений, приходящуюся на один так- товьй , отличающий- с я тем, что, с целью повьппения точности, определяют модуль ошибки по углу поворота и сравнивают его с величиной элементарного шага поворота ротора, определенной в результате деления величины фазовой дискреты на коэффициент электрической редукции, и, когда модуль ошибки по углу поворота становится меньше величины элементарного шага поворота ротора, прекращают изменение фазового сдвига между первым и вторым питающими напряжениями и начинают изменять частоты первых гармоник, питающих напряжений на одинаковую величину таким образом, чтобы ошибка по углу поворота ротора стала равной нулю,после чего переходят к регулированию на интервале следующей фазовой дискреты до полной отработки всего фазового сдвига и соответствующего ему углового поворота ротора двигателя двойного питания.
2 о Способ ,отлича ю- щ и и с я тем, что перед началом изменения частот первых гармоник питающих напряжений измеряют знак угла нагрузки двигателя двойного питания, который сравнивают со знаком ошибки по углу поворота, и при одинаковых знаках угла нагрузки и ошибки по углу поворота увеличивают частоты первых гармоник питающих напряжений, а при противоположных знаках угла нагрузки и ошибки по углу поворота уменьшают частоты первых гармоник питающих напряжений.
Л Г.
Ь),
Фиг. 2
ФиеЛ
Составитель АоЖилин Редактор О„ГоловачТехред Л.Сардюкова Корректор М.Максимииинец
Заказ 7053/55
Тираж 551
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
и
Фиг.д
Фиг. 5
Подписное
| Способ регулирования углового положения ротора двигателя двойного питания | 1986 |
|
SU1372582A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1436265A2 |
