(21)4104857/24-2А
(22)05.08.86
(46),23.05.88. Бюл. № 19 (72) М.Р. Тучинский, С.И. Гусев, Ю.Д. Амоль, А.И, Бирман и В.И. Челнаков (53) 62-50 (088.8) (56) Авторское свидетельстпо СССР 469954, кл. G 05 В 11/58, 1973.
Авторское свидетельство СССР № 974337, кл. G 05 В 11/60, 1978.
Авторское свидетельство СССР № 446030, кл. G 05 В 15/02, 1972.
(54) ПНЕВМОЭЛЕКТРОННАЯ СИСТЕМА РЕГУЛИРОВАНИЯ
(57) Изобретение относится к приборостроению и предназначено для использования в автоматизированных системах управления технологическими процессами. Цель изобретения - повышение надежности и качества. Пневмо- электронная система регулирования снабжена интегратором 9, двумя двухходовыми переключателями 6 и 12, вторым блоком вывода пневмосигнала 5 и сумматором 11. Наличие второго блока вывода пневмосигнала 5 и возможность подачи величины Рц в качестве аддитивной составляющей позволяет реализо- в вать такие законы регулирования, как П, ПИ, ПИД с переменными параметрами настройки, полупропорциональный за- ил,
(Л
Изобретение относится к приборостроению и предназначено для использования в автоматизированных системах управления технологическими про- цессами, реализуемых на базе управляющих вычислительных машин (УВМ) и средств пневмоавтоматики.
Цель изобретения - повышение надежности и качества.
На чертеже представлена структурная cxfeMa пневмоэлектронной системы регулирования,
Пневмоэлектронная система регулирования содержит УВМ I, соединенную с блоком 2 ввода пневмосигналов, подключенным к датчику 3 регулируемого параметра, и блоками Д и 5 вывода пневмосигналов. Блок 4 вывода через двухходовый переключатель 6 соединен с входом первого сумматора 7, второй вход которого связан с датчиком 3, а выход - с усилителем 8 и интегратором 9. Второй вход переключателя 6 соединен с ручньпи задатчиком 10. Вы- ходы блока 5 вывода пневмосигналов, усилителя 8 и интегратора 9 подключены к входам второго сумматора 11, выход которого подключен к входу двухходового переключателя 12, второй вход которого связан с выходом перво го переключателя 6, а выход - с пневматическим исполнительным механизмом 13, Датчик 3 и исполнительный механизм 13 установлены непосредствено на объекте 14 управления.
Все блоки системы являются стандартными функциональными элементами и кх техническая реализация не представляет затруднений,
Система регулирования работает следующим образом,
Сигнал от датчика 3 регулируемого параметра поступает в пневматический пи-регулятор, образуемый блоками 7, 8, 9, II, и одновременно через блок 2 ввода пневмосигналов и УВМ 1, УВМ реализующая сложные законы регулирования по отдельным контурам и (или)
сложные многоконтурные структуры, выдает управляющие воздействия через два блока А и 5 вывода пневмосигналов. Таким образом, организуется три замкнутых контура по каналу датчик- исполнительный механизм: через пневматическую ветвь регулятора 7, 8, 9, II, через УВМ 1 и блок А вывода, через УВМ 1 и блок 5 вывода.
0
5 0 5 0 j д
д
0
5
Давление воздуха, поступающее на исполнительньй механизм, равно
Р.ыГХ , (Р.ер-у J (Pnrp-fy dt Р,„р ,
где К,, Kj - настройки пневматического пи-регулятора,
В зависимости от положения дпух- ходов|,1х переключателей возможны следующие основные режимы работы регулятора: ручной режим (бб, I2б) ; автоматический режим с пи-законом регулирования (6б, 12а, ) с мест- frbiM управлением; автоматический режим со сложным (6б, 12а, Р, 0) законом регулирования с местным управ- лением автоматический режим со сложным законом управления и с дистанционным изменением задания через УВМ 1, в том числе от внешнего контура в каскадной схеме (6а, 12а, Р,„„ 0); режим непосредственного цифрового управления (6а, 126, Р|.ор О или 6а, 12а, Ру Р„,р; Р„р 0)/
Возможность организовать режим непосредственного цифрового управления двумя способами повышает функциональную надежность предлагаемой системы. Наличие второго блока 5 вывода и возможность подачи величины , в качестве аддитивной составляющей позволяет реализовать такие законы регулирования, как П, ДИ, ПИ, с переменными параметрами настройки, полупропорциональный закон, вяест и кор- рекцию по возмущению по выходу другого регулятора и т,п.
Формула изобретения
Пневмоэлектронная система регулирования, содержащая управляющую вычислительную мащину, соединенную с датчиком регулируемого параметра через блок ввода пневмосигнала, ручной задатчик, блок вывода пневмосигнала, последовательно соединенные сумматор и усилитель, а также пневматический исполнительный механизм, уста1 овлен- ный на объекте управления, причем первый вход первого сумматора соединен с выходом датчика регулируемого параметра, отличающаяся тем, что, с целью повышения надежности и качества, она содержит первый и второй двухходовые переключатели, интегратор, второй блок вывода пнеп- мосигнала и второй сумматор, причем первый вход первого переключателя соединен с ручным задатчиком, пторпй
,ПР7876
вход - с пыхолом пгррспо РЛОКЯ пьгпо- тельным механизмом, причрм первый да пневмосиг Ffajia, а нмход - с вторым вход второго сумматора соеду1нен с вы- входом первого сумматора н первым ходом второго блока вывода пневмосигвходом второго переключателя, второй, нала, второй вход - с выходом усилнвход которого соединен г выходом вто- теля, а третий вход череч интегратор- рого сумматора, а выход - с исполни- «мх -чюм первого сумматора.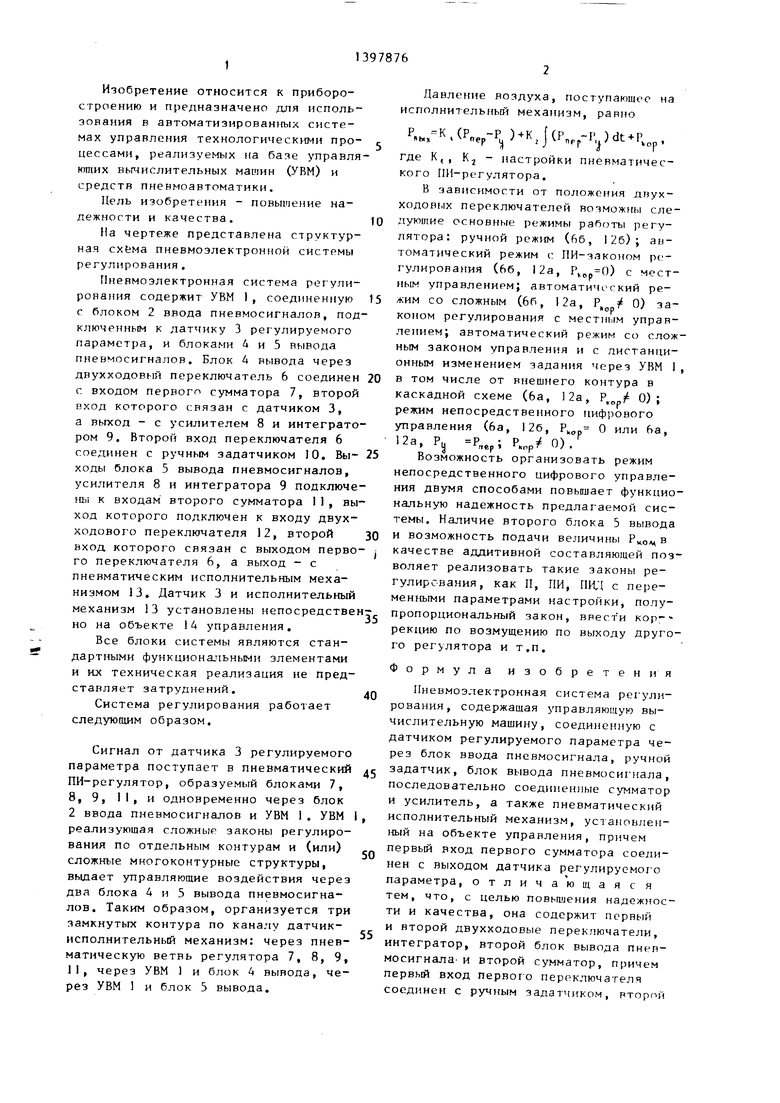
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмоэлектронная система управления | 1982 |
|
SU1012203A1 |
| Пневматический регулятор | 1989 |
|
SU1716481A1 |
| Пневмоэлектронная система централизованного контроля и управления | 1986 |
|
SU1363135A1 |
| Пневматический регулятор | 1978 |
|
SU840796A1 |
| Пневматический регулятор расхода газа | 1978 |
|
SU721800A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Каскадная система регулирования технологических процессов | 1979 |
|
SU881653A1 |
| Устройство для регулирования многопараметрического объекта | 1975 |
|
SU1080115A1 |
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ОХЛАЖДАЮЩЕЙ СРЕДЫ ТЕПЛОВОЙ МАШИНЫ | 2002 |
|
RU2215881C1 |
| Устройство для автоматического регулирования температуры перегретого пара в энергоблоке | 1981 |
|
SU954576A1 |