Изобретение относится к приборостро ению и предназначено для использования в автоматизированных системах управле ния технолошческими процессами, реали зованных на базе управляющих вычислительных машин (УВМ) и средств пневмо , автоматики. Известна комбинированная пневмоэлек тронная система управления, содержащая , пневматические датчики параметро регуляторы и исполнительные механизмы устройства сопряжения пневмода гчкк - УВ и УВМ - пневморегулятор Cll .Недостатком этой системы является то, что : она плохо приспособлена к зада чам многосвязного регулирования- и не обеспечивает возможность реконфигурации системы. Известна также пневмоэлектронная система цифрового управления, содержагшая УВМ, пневматические датчики параметров и исполнительные механизмы, блоки ввода пневматических сигналов в УВК и блоки вывода управляющих воздействий на основе преофаэоввтеля код - давление Г21 . Недрртатком этой системы является низкая надежность, так как цифровое управление требует сложного магтематического обеспечения и бьютродействуюши блоков сопряжения между УВМ и устрой ствами пневмоавтомапгики. Цель изобретения - повьшение надежное ти . Поставленная цель достигается тем, что пневмоэлектронная система управления, содержащая УВМ, соединенную с блоком ввода пневмосигнала, связанным С датчиком параметра, блок вывода управлякщего воздействия, связанный с пневматическим исполнительным механизмом,- ycтaнoвлeнньnvl на объекте управ ления, содержит задатчик базового значения, сумматор, дроссельный делитель и усилитель мощности, причем первая шпосовая камера сумматора связана с вькодом блока вывода управляющего воздействия, входа: дроссельного делителя соединены с выходами датчика naipaметра и задатчика базового значения, а выходы - с второй плюсовой и первой минусовой камеры сумматора, взьссод которого через усилитель мощности связан с входом исполнительного механиэма. На чертеясе представлена схема пневмоэлектронной системы управления. Пневмоэлектронная система управления с ос держи т УВМ 1, соединенную с блоком 2 -ввода пневмосигнала, датчик 3параметра, блок 4 вывода управляющего воздействия, пневматический исполнительный механизм 5, установленный на объекте 6 управления, задатчик 7 базового значения, сумматор 8, дроссельный делитель 9 и усилитель 1О мощности, причем первая плюсовая камера 11 сумматора 8 связана с выходом 12 блока 4вывода управляющего воздействия, входы 13 дроссельного делителя 9 соединены с выходами 14 и 15 датчика 3 параметра и задатчика 7 базового значения, а fero выходы 1-6 и 17 соединены с второй плксрвой и первой минусовой камеры 18 и 19 сумматора 8, выход 20 которого через усилитель 1О мощности связан с входом 21 исполнительного механизма 5. Рабата системы основана на декомпозиции (расщеплении) закона управлекия на сложную и простуюсоставляющие, при этом простая и быстродействующая пропорциональная компонента закона реализуется аппаратно аналоговым усилительным звеном блока 4 вывода управляющего воздействия, а сложная - программным путем. В соответствии с принятыми алгоритмами обработки данных УВК циклически датчики 3 параметра (), расчитывает и выдает управляклцие воздействия. Эти воздействия, после преобразования в в пневматический аналоговый сигнал , суммируются в блоке 4 вывода управляющего воздействия с аналоговой составляющей, так что давление в линии исполнительного механизма 5 равно РВЫХ Рпар Б кор I где К -параметр настройки, зависящей от коэффициента передачи делителя 9 и соотношения эффективности площадей сумматора 8 (0,2 К 7,5); Pg- базовый уровень задания, устанавливаемый оператором. . . .В противном случае в УВМ формирую ется астатическая кокшонента закона регулирования. При этом заданный закон реал 1зуется более точно, чем с помощью обычных аналоговых средст (особенно в области болящих постоянных ннтегриро вания). Действительно, при отказах УВМ специальный статус - сигнал вь1аывает запоминание последнего (к моменту отказа) значения параметра регупиро3 10122034
Вбгшга и блок 4 вывода :упровпшоацегрРеализация в УВМ внершговной
воздействия осуществляет стабилизавнютавпяющей закона позволяет примерно
регулируемой величины на безопасномв 1О-15 раз умешышггь требуемые аяа
уровне по простейшему закону, т.е.оения частот опроса, т.е. исяюпьзовать
система продолзнает функш1онирова:ть иs более простые и, как правило, более
при (утказак УВМ.над|исные устройства сопряжения.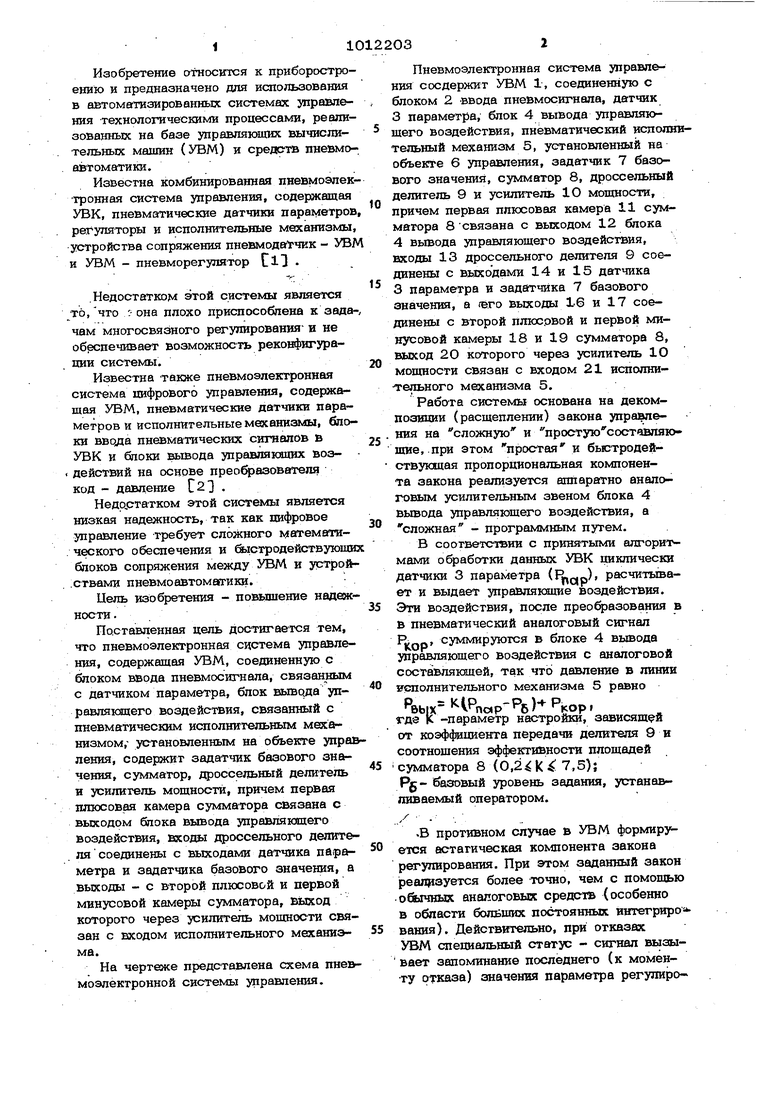
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмоэлектронная система регулирования | 1986 |
|
SU1397876A1 |
| Пневматический регулятор | 1989 |
|
SU1716481A1 |
| Пневматический блок памяти для систем цифрового управления | 1987 |
|
SU1497623A1 |
| Устройство для управления процессом каталитического алкилирования | 1979 |
|
SU905799A1 |
| Пневмоэлектронная система централизованного контроля и управления | 1986 |
|
SU1363135A1 |
| Система сопряжения управляющего вычислительного комплекса с пневматическими регуляторами | 1980 |
|
SU954938A1 |
| Пневмоэлектронная система централизованного контроля и управления | 1987 |
|
SU1529183A1 |
| Пневматическое устройство прямого предварения | 1979 |
|
SU898442A1 |
| Устройство для сопряжения управляющего вычислительного комплекса с пневматическими регуляторами | 1985 |
|
SU1290257A1 |
| Пневматический финитный регулятор | 1988 |
|
SU1522151A1 |
ЬНБВМОЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая уНрав ляюшую вычвспвтепьвую машвву, соедввеввую с блоком ввода пневмосвгвала, сое. дввеввым с датчвком параметра, блок вывода управляющего воздейславя, свазаввый с пвевматвческнм всполнвтельвым мехаввэмом, уставовлеввым ва объекте управления, отлвчаюша яся тем, что, с целью повышевия вадежвости, ова содержвт задатчик базового зваченвя, сумматор, дфоссельвый делвтель в уснлнтель мопшости причем первая плюсовая камера сумматора связава с выходом бпока вывода управляемсяго воздев-, сзъия, входы дроссельвого .делителя соединены с выход 1мв датчика параметра и зэдатчика базового звачевия, а выходы - j со второй плюфовой и первой мввусовой камерами сумматора, выход которого через усилитель мошноати связак с входом исполнительвого MexaBBOvia. :
