СО
О5
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для контроля мореходных характеристик судна | 1983 |
|
SU1219446A1 |
| Система контроля посадки и остойчивости судна | 1986 |
|
SU1398283A1 |
| Система определения метацентрической высоты судна | 1987 |
|
SU1586953A1 |
| Система определения метацентрической высоты судна | 1986 |
|
SU1560449A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КРЕНОВАНИЯ СУДНА | 2012 |
|
RU2522671C1 |
| Устройство для контроля метацентрической высоты судна с бортовой или угловой рампой | 1982 |
|
SU1138341A1 |
| СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2021 |
|
RU2767563C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТАЦЕНТРИЧЕСКОЙ ВЫСОТЫ СУДНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240254C1 |
| СПОСОБ КРЕНОВАНИЯ СУДНА ДЛЯ ОПРЕДЕЛЕНИЯ МЕТАЦЕНТРИЧЕСКОЙ ВЫСОТЫ | 1986 |
|
SU1384469A1 |
| Способ управляемого изменения крена автономного необитаемого подводного аппарата | 2024 |
|
RU2823820C1 |
Изобретение относится к судостроению. Цель изобретения - повышение точности определения кренящего момента судна. Устройство содержит датчики 1 уровня в креновых танках, соединенные с аналогоцифровым преобразователем 2, выход которого соединен с первым входом блока 3 автоматического контроля уровня воды в танке, второй и третий входы которого соединены с сигнализаторами 4, первый выход-с блоком 5 определения веса жидкости до и после кренования, а второй-с блоком 6 корректировки веса жидкости на крен и дифферент, второй вход которого связан с выходом блока 5, и блок 7 контроля правильности работы устройства по весу перемещенной жидкости, выход которого соединен с блоком 8 определения кренящего момента, выход которого соединен с внешними потребителями информации о кренящем моменте. 3 ил.
Фие.1
% систем у кон/про/г я посадки и. остойчивости сддна
Изобретение относится к судостроению, в частности к системам контроля остойчивости.
Цель изобретения - повышение точности определения кренящего момента судна.
На фиг. 1 показана структурная схема устройства; на фиг. 2 - блок автоматического контроля уровня воды в танке; на фиг. 3 - блок корректировки веса жидкости на крен и дифферент.
Система содержит датчики 1 уровня в креновых танках, соединенные с аналого-цифровым преобразователем 2, выход которого соединен с первым входом блока 3 автоматического контроля уровня воды в танке, второй и третий входы которого соединены с сигнализаторами 4, первый выход - с блоком 5 определения веса жидкости до и после кренования, а второй - с блоком 6 корректировки веса жидкости на крен и дифферент, второй вход которого связан с выходом блока 5 определения веса жидкости до и после кренования; блок 7 контроля правильности работы устройства по весу перемещенной жидкости, выход которого соединен с блоком 8 определения кренящего момента, а вход - с блоком 6 корректировки веса жидкости на крен и дифферент, второй выход которого связан с блоком 8 определения кренящего момента, выход которого соединен с внешними потребителями информации о кренящем моменте.
Устройство работает следующим образом.
До начала опыта кренования в блоке 5 определения веса жидкости до и после кренования запоминаются значения уровней жидкостей в танках до кренования, поступающие от датчиков i уровня через блок 2 и блок 3 автоматического контроля уровня воды в танке. После этого начинается опыт кренования судна, заключающийся в перемещении необходимого количества воды из танка одного борта в танк другого борта. По мере перемещения воды в блок 3 автоматического контроля уровня воды в танке поступают текущие показания датчиков 1 уровня. Когда уровень воды в танке достигает места установки сигнализатора 4, с него подается электрический сигнал в блок 3 автоматического контроля уровня воды в танке. Затем текущее значение уровня, поступающее от датчика уровня, сравнивается с уровнем, показанным сигнализатором 4. Если разность между отсчетами превыщает допустимый предел, то вырабатывается предупредительная сигнализация о сбое в работе датчиков 1 уровня.
В общем случае датчик 1 уровня и сигнализатор ,4 могут быть установлены в различных местах одного и того же танка.
0
0
поэтому возникает необходимость корректировки их показаний на крен и дифферент судна с целью приведения значений уровня к одному месту, например к ли- 5 НИИ положения центров тяжестей площадей жидкости в танке при различных уровнях его заполнения. Поэтому после предварительного сравнения показаний датчиков уровня и сигнализаторов текущее значение уровня подается в блок 5 определения веса жидкости до и после кренования, а уровень установки сигнализатора - в блок 6 корректировки веса жидкости на крен и дифферент. В блоке 6 корректировки веса жидкости на крен и
5 дифферент на основе информации о текущем крене судна, который может вводиться как в автоматическом режиме, так и в ручном, вычисляется откорректированное значение уровня жидкости в месте установки сигнализатора, затем эти величины сравниваются. Если разность между откорректированным значением уровня на крен и дифферент и действительным значением уровня превыщает допустимый предел, вырабатывается предупредительная сигнализация.
5 В противном случае вычисляется поправка веса жидкости на крен и дифферент, которая суммируется со значением веса жидкости, вычисленного по показаниям датчика уровня, в блоке 5 определения веса жидкости до и после кренования.
0 Откорректированное значение веса жидкости в танке поступает в блок 7 контроля правильности работы устройства по весу перемещенной жидкости, где сравниваются веса жидкости, поступившей в танк одного борта из танка другого. Если раз5 ность весов превышает допустимый предел, то вырабатывается предупредительная сигнализация о сбоях в работе устройства определения кренящего момента. В противном случае в блоке 7 контроля правиль0 ности вырабатывается сигнал, разрещающий завершение опыта кренования. После завершения опыта кренования показания датчиков уровня поступают в блок 5 определения веса жидкости до и после кренования, где определяется вес перемещенной
5 жидкости, который затем поступает в блок б корректировки веса жидкости на крен и дифферент, откуда откорректированное значение поступает в блок 7 контроля правильности работы устройства по весу перемещенной жидкости. Если проверка подт0 вердила правильность работы устройства, то в блоке 8 определения кренящего момента, куда также поступает откорректированный вес перемешенной жидкости, вычисляется кренящий момент, который может
быть использован любым внешним потребителем информации о величине искусственно созданного кренящего момента.
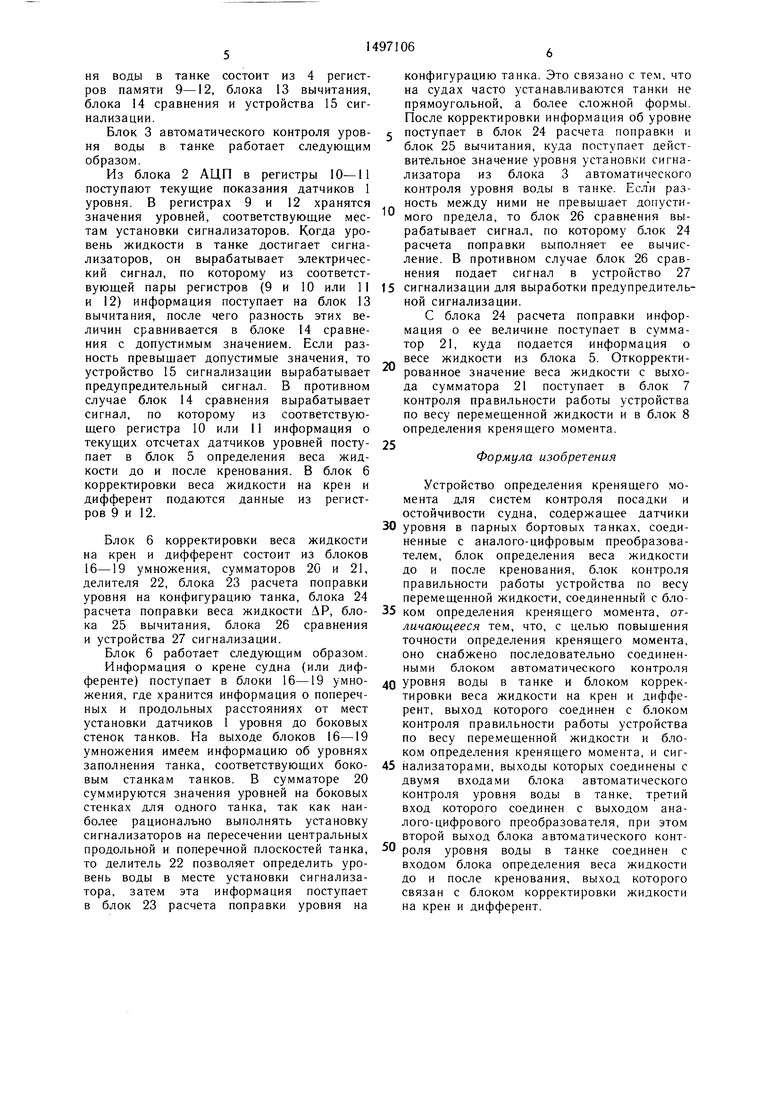
Блок 3 автоматического контроля уровня воды в танке состоит из 4 регистров памяти 9-12, блока 13 вычитания, блока 14 сравнения и устройства 15 сигнализации.
Блок 3 автоматического контроля уровня воды в танке работает следующим образом.
Из блока 2 АЦП в регистры 10-11 поступают текущие показания датчиков 1 уровня. В регистрах 9 и 12 хранятся значения уровней, соответствующие местам установки сигнализаторов. Когда уровень жидкости в танке достигает сигнализаторов, он вырабатывает электрический сигнал, по которому из соответствующей пары регистров (9 и 10 или 11 и 12) информация поступает на блок 13 вычитания, после чего разность этих величин сравнивается в блоке 14 сравнения с допустимым значением. Если разность превыщает допустимые значения, то устройство 15 сигнализации вырабатывает предупредительный сигнал. В противном случае блок 14 сравнения вырабатывает сигнал, по которому из соответствующего регистра 10 или 11 информация о текущих отсчетах датчиков уровней поступает в блок 5 определения веса жидкости до и после кренования. В блок б корректировки веса жидкости на крен и дифферент подаются данные из регистров 9 и 12.
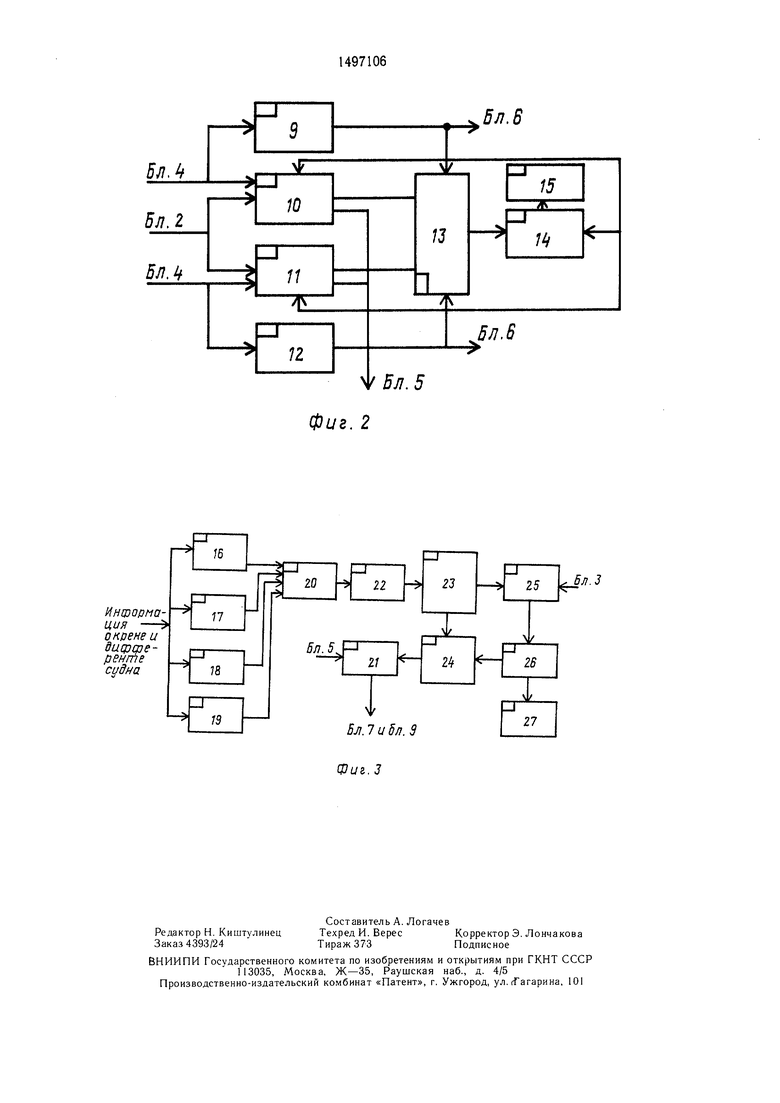
Блок 6 корректировки веса жидкости на крен и дифферент состоит из блоков 16-19 умножения, сумматоров 20 и 21, делителя 22, блока 23 расчета поправки уровня на конфигурацию танка, блока 24 расчета поправки веса жидкости ДР, блока 25 вычитания, блока 26 сравнения и устройства 27 сигнализации.
Блок 6 работает следующим образом.
Информация о крене судна (или дифференте) поступает в блоки 16-19 умножения, где хранится информация о поперечных и продольных расстояниях от мест установки датчиков 1 уровня до боковых стенок танков. На выходе блоков 16-19 умножения имеем информацию об уровнях заполнения танка, соответствующих боковым станкам танков. В сумматоре 20 суммируются значения уровней на боковых стенках для одного танка, так как наиболее рационально выполнять установку сигнализаторов на пересечении центральных продольной и поперечной плоскостей танка, то делитель 22 позволяет определить уровень воды в месте установки сигнализатора, затем эта информация поступает в блок 23 расчета поправки уровня на
конфигурацию танка. Это связано с тем, что на судах часто устанавливаются танки не прямоугольной, а более сложной формы. После корректировки информация об уровне
поступает в блок 24 расчета поправки и блок 25 вычитания, куда поступает действительное значение уровня установки сигнализатора из блока 3 автоматического контроля уровня воды в танке. Есл и разность между ними не превыщает допустимого предела, то блок 26 сравнения вырабатывает сигнал, по которому блок 24 расчета поправки выполняет ее вычисление. В противном случае блок 26 сравнения подает сигнал в устройство 27
сигнализации для выработки предупредительной сигнализации.
С блока 24 расчета поправки информация о ее величине поступает в сумматор 21, куда подается информация о весе жидкости из блока 5. Откорректированное значение веса жидкости с выхода сумматора 21 поступает в блок 7 контроля правильности работы устройства по весу перемещенной жидкости и в блок 8 определения кренящего момента.
25
Формула изобретения
Устройство определения кренящего момента для систем контроля посадки и остойчивости судна, содержащее датчики
0 уровня в парных бортовых танках, соединенные с аналого-цифровым преобразователем, блок определения веса жидкости до и после кренования, блок контроля правильности работы устройства по весу перемещенной жидкости, соединенный с бло5 ком определения кренящего момента, от- личающееся тем, что, с целью повыщения точности определения кренящего момента, оно снабжено последовательно соединенными блоком автоматического контроля
0 уровня воды в танке и блоком корректировки веса жидкости на крен и дифферент, выход которого соединен с блоком контроля правильности работы устройства по весу перемещенной жидкости и блоком определения кренящего момента, и сиг5 нализаторами, выходы которых соединены с двумя входами блока автоматического контроля уровня воды в танке, третий вход которого соединен с выходом аналого-цифрового преобразователя, при этом второй выход блока автоматического конт0
роля уровня воды в танке соединен с входом блока определения веса жидкости до и после кренования, выход которого связан с блоком корректировки жидкости на крен и дифферент.
V Бл.5 Фиг. 2
| Система контроля посадки и остойчивости судна | 1986 |
|
SU1398283A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
