1
Изобретение относится к транспортному машиностроению, а именно к системам стабилизации положения транспортных средств.
Целью изобретения является повышение устойчивости транспортного средства.
На чертеже схематически показано устройство, общий вид.
Устройство управления выравниванием остова транспортного средства содержит маятниковый датчик крена с маятником, выполненным в виде груза 1 и штанги 2, подвешенной на шарнире 3 с горизонтальной осью, а в средней части связанной с демпфером и гидравлическим распределителем 5 шарнирно с помощью тяг 6 и 7. На штанге 2 выполнена вертикальная направляющая 8, на которой подвижно установлен с возможностью линейного перемещения вдоль направляющей груз маятника, подпружиненный с двух сторон пружинами 9. Маятник заключен в корпус 10, заполненньш демпфируюп ей жидкостью, закрепленньм на остове и несущий на себе гидравлический распределитель 5 и демпфер 4,
Распределитель 5 связан с силовым цилиндром 11 привода механизма вырав нивания тр.анспортного средства в вертикальное положение на склоне, который питает рабочей жидкостью источник 12 давления с предохранительным клапаном 13 и сливом 14, сообщенным трубопроводами 15.
в нижней части маятника по подвижном грузе 1 закреплена обмотка 16 (в частности, селеноид) электромагнита, причем таким образом, что ось его сердечника 17 лежит в плоскости качаний маятника. Сердечник связан с корпусом посредством своих закруглен- ньт торцов 18, свободно касающихся его вертикапьных стенок 19. Такое конструктивное решение обеспечивает беспрепятственное перемещение груза и несомой им обмотки 16 как при качании совместно со штангой 2 на шарнире 3, так и при перемещении вдоль нее при отсутствии электромагнитного поля. Питающая электромагнит цепь снабжена разъемньп-i контактом. Одна часть контакта - упругая пластина 20, принадлежащая электромагниту (т.е. подсоединенная к одному из концов 21 его обмотки 16), - связана неподвижно с грузом 1 посредством изолято
Г)
10
15
зо 20
25
2406402
ра 22 и несущих обмотку конструктивных элементов 23. Другая, ответная упомянутой, часть контакта - шляпка винта 24, пренадлежащая источнику питания 25 (т.е. подсоединенная к одной из его клемм 26), - установлена под первой на корпусе 10 посредством изолятора 27. Второй конец 28 обмотки электромагнита подсоединен к второй клемме 29 источника питания посредством гибкого изолированного проводника 30, свернутого в спираль для беспрепятственного перемещения обмотки 16 совместно с грузом 1. Оба выхода ветвей цепи питания электромагнита из корпуса герметизированы уплотнителями 31, не допускающими вытекания демпфирующей жидкости.
Сердечник 17 электромагнита выполнен из высокомагнитного материала, обеспечивая значительное силовое взаимодействие с электромагнитным полем обмотки 1-6. Все остальные элементы устройства во избежание такого взаимодействия выполнены из немагнитных материалов. Демпфирующая жидкость, заполняющая полость корпуса, неэлектропроводна.
Геометрические размеры гибкой пластины 20 и шляпки винта 24 таковы, что обеспечивают их контактирование при опускании груза в диапазоне перемещений маятника, не превьш ающем предел чувствительности устройства - углового отклонения маятника, в пределах которого он не вызывает переключений зохютника гидрораспредели- ,теля 5 в рабочие позиции и обеспечивает по-прежнему посредством него 40 сообщение источника 12 давления со сливом 14 и запирание полостей силового цилиндра 11.
Реостатом 32, подсоединенным в цепи питания электромагнита, обеспе- 45 чивают регулирования силового воздействия магнитного поля обмотки 16 с сердечником 17, а тем самым и параметры депфирования колебаний маятника.
Устройство работает следующим образом.
35
50
При крене транспортного средства маятник, стремясь сохранить под действием силы тяжести вертикальное положение, переключает золотник гидрораспределителя 5 в левую или правую рабочую позицию в зависимости от направления крена. Благодаря этому источник 12 давления рабочей жидкости приводит силовой цилиндр 11 привода механизма выравнивания, транспортного средства в действие в том или ином направлении. Как только механизм вы- равнивания возвратит транспортное средство в положение, близкое в пределах чувствительности датчика крена к вертикальному, маятник переключает золотник распределителя 5 в исходную позицию, заблокировав тем самым посредством силового цилиндра механизм выравнивания до очередного изменения наклона поверхности движения.
Неизбежные в реальных условиях неровности поверхности движения (микрорельеф) оказывают влияние на маятник наряду с силой тяжести его массы. Дополнительное инерционное воздействие на маятник оказывает и кри- волинейность реальной траектории движения транспортного средства. И то, и другое стремится вывести маятник в режим вынужденных колебаний, сопровождающийся значительным возраста- нием частоты и резонансными явлениями, которые нарушают нормальную работу устройства (ведут к невызванным изменениям наклона поверхности движения, срабатыванию механизма вы- равнивания или срабатыванию в проти- вофазе с направлением крена транспортного средства, что опасно возможностью опрокидывания). Однако возникновение такой ситуации исключает несомый грузом 1 маятника злектро- магнит, подключаемьш к источнику питания 25 автоматически, как только частота колебаний маятника на шарнире 3 превысит допустимую (неопасную с точки зрения появления резонанса и автоколебаний системы). Действительно, при возрастании частоты колебаний маятника возрастают и центробежные силы на груз 1 и связанные с ним
j
5 0 5 Q
5
0
детали электромагнита. Под действием этих сил груз, электромагнит и несомая ими упругая пластина 20 перемещается вниз, :преодолевая силы упругости пружин 9. Выдвинувшись, пластина 20 задевает в момент прохождения маятником исходного положения (вертикального) за шляпку винта 24, замыкая тем самым цепь питания электромагнита. Возникшее вокруг обмотки 16 электромагнитное поле, вступив в силовое взаимодействие с сердечником 17, тормозит маятник, снизив его частоту до допустимой. Как только это произойдет, уменьшившиеся центробежные силы на груз и электромагнит позволяют пружинам 9 приподнять их, обеспечив тем самым размыкание цепи питания электромагнита до тех пор, пока частота колебаний маятника не превысит по каким-либо причинам допустимую.
Таким образом, принцип действия устройства состоит в том, что электромагнит не влияет на колебания маятника, пока они соответствуют нормальному режиму работы системы, так как питающая электромагнит цепь в этом случае разомкнута, С появлением опасных высокочастотных колебаний, когда маятник обладает (проходя исходное вертикальное положение) скоростью, а следовательно, и кинематической энергией, достаточной для перевода золотника гидрораспределителя 5 в рабочую позицию и вызова тем самым ненужного, необусловленного изменениями рельефа поверхности движения, срабатывания механизма выравнивания, цепь автоматиче ски замыкается и замыкается электромагнитное поле, притормаживает маятник до скорости, соответствующая которой кинематическая энергия не в состоянии переключить золотник.
/
/
J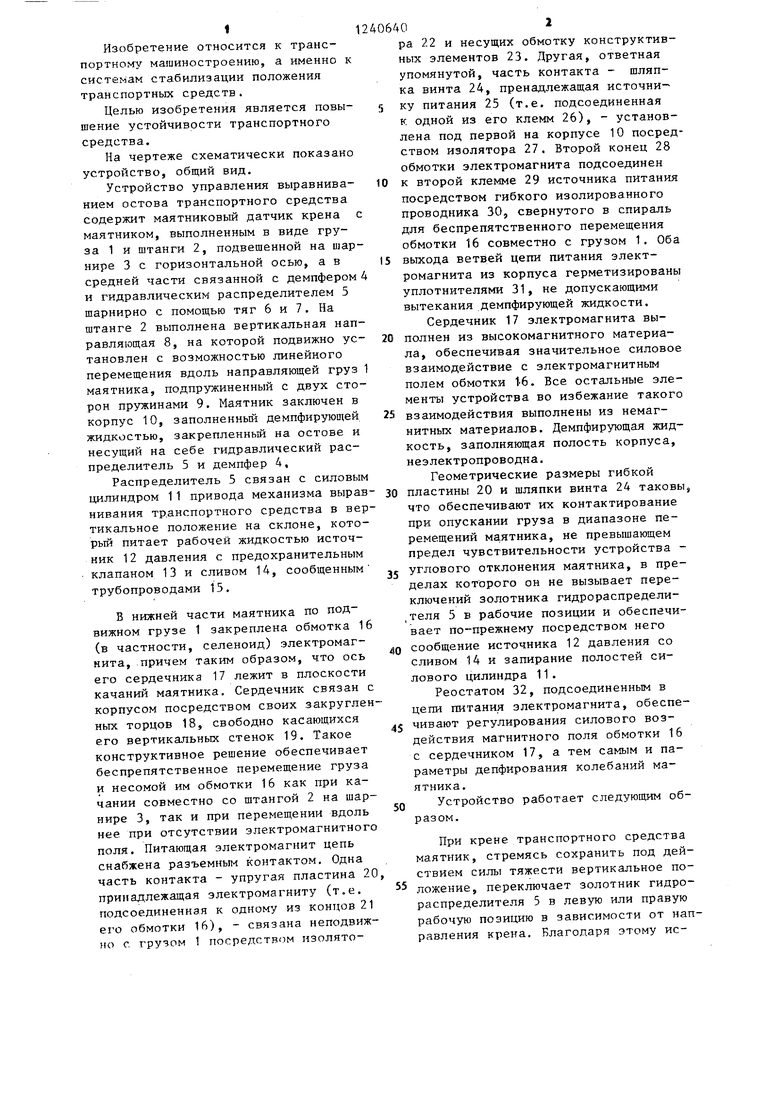
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат управления стабилизацией положения транспортного средства | 1986 |
|
SU1399186A1 |
| Автомат-стабилизатор | 1982 |
|
SU1049271A1 |
| Саморазгружающаяся тракторная тележка со стабилизацией положения остова | 1984 |
|
SU1235759A1 |
| Транспортное средство повышенной проходимости | 1983 |
|
SU1133127A1 |
| Маятниковый датчик крена крутосклонного транспортного средства | 1979 |
|
SU870206A1 |
| Автомат-стабилизатор крутосклонного транспортного средства | 1980 |
|
SU948698A1 |
| СИСТЕМА ПОВЫШЕНИЯ УСТОЙЧИВОСТИ ТРАНСПОРТНОГО СРЕДСТВА ПРОТИВ ОПРОКИДЫВАНИЯ | 2011 |
|
RU2487812C2 |
| Устройство компенсации бокового крена транспортного средства | 1984 |
|
SU1220937A1 |
| Колесное транспортное средство для работы на склонах | 1981 |
|
SU986815A1 |
| Автомат-стабилизатор крутосклонногоТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU816801A1 |
Редактор Н.Швыдкая
Составитель В.Степанов Техред О.Гортнан
Заказ 3443/14 Тираж 647Подписное
ВНИгата Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Проияводственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
Корректор Г.Решетник
| Устройство управления выравниванием остова транспортного средства | 1982 |
|
SU1098835A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
