J
(Л
«/
Для этого подвешенный на оси 1 маятник 2 снабжен двумя гидравлическими демпферами, один из которых непосредственно связан с маятником, а второй- через упругий элемент 7 и установ-, лен на золотнике 6 управляемого маятником гидрораспределителя 3. Проходное сечение установленного на золотнике 6 демпфера 4 вьшолнено возрастающим от средней части его поршня 11 к торцам, а проходное сечение демпфера 5, связанного с маятником, - убьшакяцим от середины его поршня 13 к торцам. 4 ил.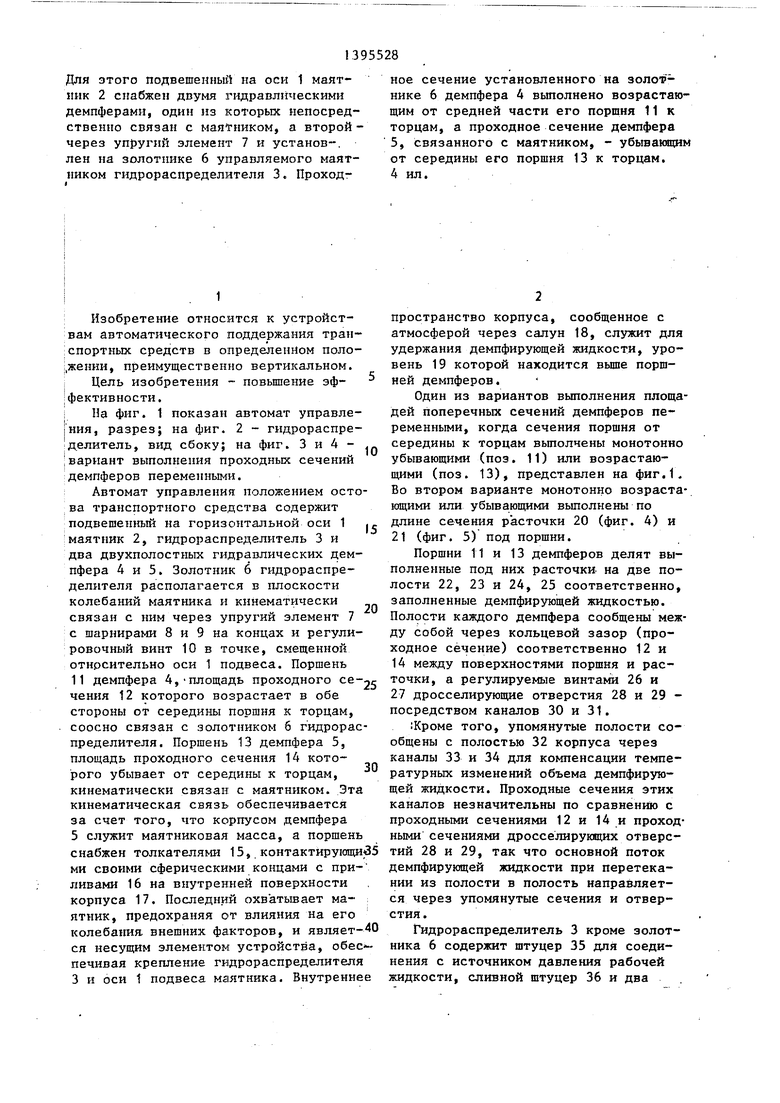
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат-стабилизатор крутосклонного транспортного средства | 1982 |
|
SU1062029A1 |
| Автомат-стабилизатор крутосклонного транспортного средства | 1980 |
|
SU948698A1 |
| Автомат-стабилизатор крутосклонного транспортного средства | 1981 |
|
SU1031802A1 |
| Автомат-стабилизатор крутосклонногоТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU816801A1 |
| Устройство управления выравниванием остова транспортного средства | 1984 |
|
SU1240640A2 |
| Автомат-стабилизатор | 1982 |
|
SU1049271A1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| Автомат управления стабилизацией положения транспортного средства | 1986 |
|
SU1399186A1 |
| Гидравлический стабилизатор крутосклонного транспортного средства | 1979 |
|
SU787191A1 |
| ПНЕВМАТИЧЕСКИЙ ДЕМПФЕР | 1994 |
|
RU2082040C1 |
Изобретение относится к устройствам автоматического поддержания вертикального положения транспортных средств, преимущественно горных сельскохозяйственных тракторов и самоходных мобильных машин на склоне. Цель изобретения - повышение эффективности,
1
: Изобретение относится к устройствам автоматического поддержания транicnopTHbK средств в определенном поло;,жении, преимущественно вертикальном.
I Цель изобретения - повышение эф-
|фективности.
I На фиг. 1 показан автомат управле|ния, разрез; на фиг. 2 - гидрораспре делитель, вид сбоку; на фиг. 3 и 4 -
:вариант выполнения проходных сечений
;демпферов переменными.
: Автомат управления положением остова транспортного средства содержит
подвешенный на горизонтальной оси 1
15
20
;маятник 2, гидрораспределитель 3 и два двухполостных гидравлических демпфера 4 и 5. Золотник 6 гидрораспределителя располагается в плоскости колебаний маятника и кинематически связан с ним через упругий элемент 7 с шарнирами 8 и 9 на концах и регулировочный винт 10 в точке, смещенной относительно оси 1 подвеса. Поршень 11 демпфера 4, площадь проходного се-2г чения 12 которого возрастает в обе стороны от середины поршня к торцам, соосно связан с золотником б гидрораспределителя. Поршень 13 демпфера 5, площадь проходного сечения 14 которого убывает от середины к торцам, кинематически связан с маятником. Эта кинематическая связь обеспечивается за счет того, что корпусом демпфера 5 служит маятниковая масса, а поршень снабжен толкателями 15, контактирующиЗЗ ми своими сферическими концами с при- ливами 16 на внутренней поверхности корпуса 17. Последни:й охватьшает маятник, предохраняя от влияния на его колебания внешних факторов, и являет- О ся несущим элементом устройства, печивая крепление гидрораспределителя 3 и оси 1 подвеса маятника. Внутреннее
30
..
5
0
г ЗО
0
пространство корпуса, сообщенное с атмосферой через салун 18, служит для удержания демпфирующей жидкости, уровень 19 которой находится выще поршней демпферов.
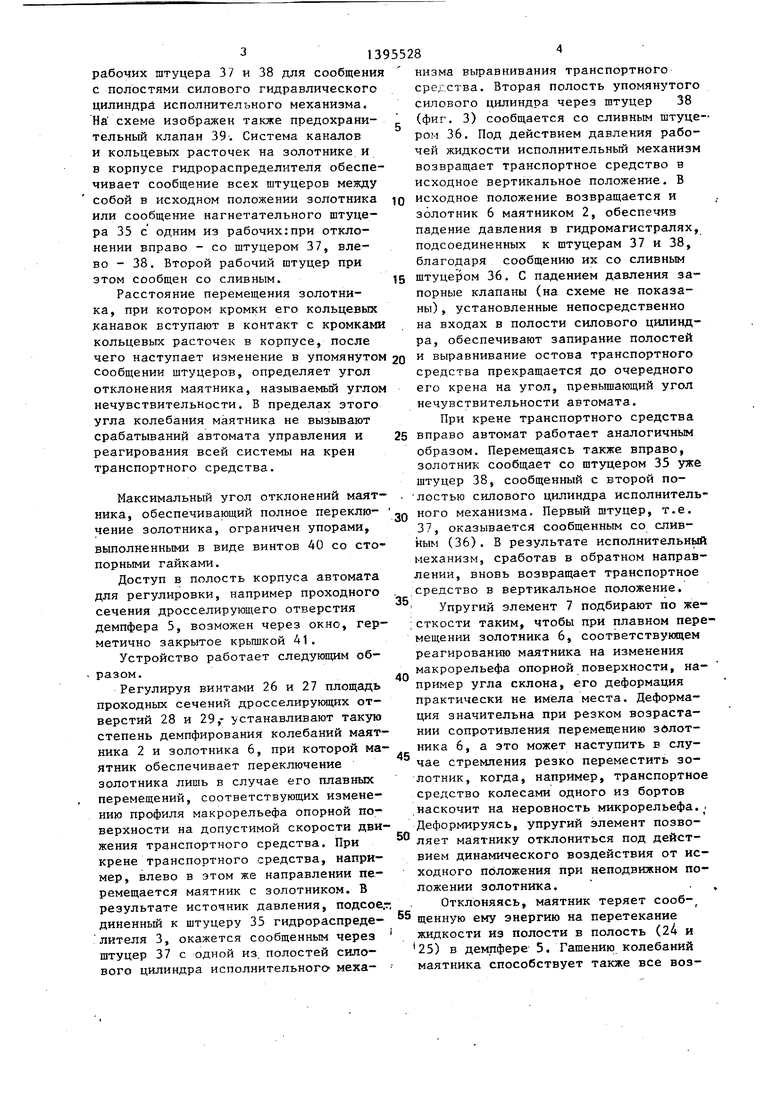
Один из вариантов выполнения площадей поперечных сечений демпферов переменными, когда сечения поршня от середины к торцам вьшолчены монотонно убывающими (поз. 11) или возрастающими (поз. 13), представлен на фиг.1. Во втором варианте монотонно возрастающими или убывающими вьшолнены по длине сечения расточки 20 (фиг. 4) и 21 (фиг. 5) под поршни.
Поршни 11 и 13 демпферов делят выполненные под них расточки на две полости 22, 23 и 24, 25 соответственно, заполненные демпфирующей жидкостью. Полости каждого демпфера сообщены между собой через кольцевой зазор (проходное сечение) соответственно 12 и 14 между поверхностями поршня и расточки, а регулируемые винтами 26 и 27 дросселирующие отверстия 28 и 29 - посредством каналов 30 и 31.
Кроме того, упомянутые полости сообщены с полостью 32 корпуса через каналы 33 и 34 для компенсации температурных изменений объема демпфирующей жидкости. Проходные сечения этих каналов незначительны по сравнение с проходньми сечениями 12 и 14 и проходными сечениями дросселирующих отверстий 28 и 29, так что основной поток демпфирующей жидкости при перетекании из полости в полость направляется через упомянутые сечения и отверстия.
Гидрораспределитель 3 кроме золотника 6 содержит штуцер 35 дпя соединения с источником давления рабочей жидкости, сливной штуцер 36 и два
рабочих штуцера 37 и 38 для сообщения с полостями силового гидравлического цилиндрй исполнительного механизма. На схеме изображен также предохранительный клапан 39. Система каналов и кольцевых расточек на золотнике и в корпусе гидрораспределителя обеспечивает сообщение всех штуцеров между собой в исходном положении золотника или сообщение нагнетательного штуцера 35 с одним из рабочих:при отклонении вправо - со штуцером 37, влево - 38. Второй рабочий штуцер при зтом сообщен со сливным.
Расстояние перемещения золотника, при котором кромки его кольцевых канавок вступают в контакт с кромками кольцевых расточек в корпусе, после чего наступает изменение сообщении штуцеров, определяет угол отклонения маятника, называемый углом нечувствительности. В пределах этого угла колебания маятника не вызывают срабатываний автомата управления и реагирования всей системы на крен транспортного средства.
10
Максимальный угол отклонений маятника, обеспечивающий полное переключение золотника, ограничен упорами, выполненными в виде винтов 40 со стопорными гайками.
Доступ в полость корпуса автомата для регулировки, например проходного сечения дросселирующего отверстия демпфера 5, возможен через окно, герметично закрытое крьш1кой 41.
Устройство работает следующим образом.
Регулируя винтами 26 и 27 площадь проходных сечений дросселирующих отверстий 28 и 29, устанавливают такую степень демпфирования колебаний маятника 2 и золотника 6, при которой маятник обеспечивает переключение золотника липгь в случае его плавных перемещений, соответствующих изменению профиля макрорельефа опорной поверхности на допустимой скорости движения транспортного средства. При крене транспортного средства, например, влево в этом же направлении перемещается маятник с золотником. В результате источник давления, подсоединенный к штуцеру 35 гидрораспределителя 3, окажется сообщенным через штуцер 37 с одной из. полостей силового цилиндра исполнительного меха-
низма вьфавнивания транспортного средства. Вторая полость упомянутого СИ.ПОВОГО цилиндра через штуцер 38 (фиг. 3) сообщается со сливным штуцером 36. Под действием давления рабочей жидкости исполнительный механизм возвращает транспортное средство в исходное вертикальное положение. В исходное положение возвращается и золотник 6 маятником 2, обеспечив падение давления в гидромагистралях, подсоединенных к штуцерам 37 и 38, благодаря сообщению их со сливным 15 штуцером 36. С падением давления запорные клапаны (на схеме не показаны) , установленные непосредственно на входах в полости силового цилиндра, обеспечивают запирание полостей в упомянутом 20 выравнивание остова транспортного средства прекращается до очередного его крена на угол, превьш ающий угол нечувствительности автомата.
При крене транспортного средства 25 вправо автомат работает аналогичным образом. Перемещаясь также вправо, золотник сообщает со штуцером 35 уже штуцер 38, сообщенный с второй по- лостью силового цилиндра исполнительного механизма. Первый штуцер, т.е. 37, оказывается сообщенным со сливным (36). В результате исполнительный механизм, сработав в обратном направлении, вновь возвращает транспортное средство в вертикальное положение.
Упругий элемент 7 подбирают по жесткости таким, чтобы при плавном перемещении золотника 6, соответствующем реагированию маятника на изменения макрорельефа опорной поверхности, например угла склона, его деформация практически не имела места. Деформация значительна при резком возрастании сопротивления перемещению зйлот- ника 6, а это может наступить в случае стремления резко переместить золотник, когда, например, транспортное средство колесами одного из бортов наскочит на неровность микрорельефа.. Деформируясь, упругий элемент позволяет маятнику отклониться под действием динамического воздействия от исходного положения при неподвижном положении золотника.
Отклоняясь, маятник теряет сооб- 5 щенную ему энергию на перетекание жидкости из полости в полость (24 и 25) в демпфере 5. Гашению колебаний маятника способствует также все воз30
35
40
45
50
10
15 20
25
30
25
35
40
45
50
растающее по мере отклонения от вертикали сопротивление демпфера благодря уменьшению площади его проходного сечения 1А до минимального значения 3 крайних положениях поршня 13.
Благодаря тому, что демпфер 4 в исходном положении поршня 11 {фиг.1) имеет максимальное сопротивление перемещению из-за минимального значения площади проходного сечения 12, маятник 2, совершая колебания относительно исходного вертикального положения с высокой частотой в результате динамических воздействийj не в состоянии вызывать переключения золотника 6 то п одном, то в другом направлении. Это предотвращает беспорядочное срсгбатыва {ие механизма выравнивания транспортного средства. которое привело бы к ее большему раскачиванию маятника и выходу системы на режим автоколебаний.
Роль упругого элемента 7 двоякаяj С одной стороны.элемент позволяет I маятнику совершать колебания при не- I подвижном положении золотника и рассеивать сообщеннуго ему энергию в
: демпфере 5 с другой стороны способ- ; ствует возвращению маятника при вы- i сокочастотных колебаниях п исходное
положение.
При уменьшении частоты колебаний маятника до безопасного уровня со- :противление демпфера 4 упадет и силы ;упругости упругого элемента 7 окажется достаточно для ник а.
перемещения золотТаким образом, наличие двух демп- .(Ьеров (одного - на золотнике, другого на матпике) в совокупности с упругой связью золотника с маятником обеспечивает реагирование системы на
5
0
5
0
5
0
Низкочастотные колебания маятника,, обусловленные макрорельефом опорной поверхности, и предотвращает реагирование на высокочастотные колебания, причиной которых может послужить воздействие неровностей микрорельефа при движении транспортного средства на недопустимо высоких скоростях с включенной системой стабилизации. Рубеж, разделяющий колебания, на которые система должна и не должна реагировать, регулируют, изменяя сопротивление демпферов 4 и 5 винтами 26 и 27, а также подбором упругого элемента 7 определенной жесткости применительно к условиям и режимам эксплуатации транспортного средства.
Формула изобретения
Автомат управления положением остова транспортного средства, содержащий корпус, гидрораспределитель, подвешенный на горизонтальной оси маятник и установленный на нем двухполо- стной гидравлич ский демпфер, причем золотник гидрораспределителя кинематически связан с маятником, а демпфер выполнен с переменной площадью проходного сечени-я, изменяющейся в обе стороны от середины его поршня, отличающийся тем, что, с целью повьш1ения эффективности, он снабжен вторым двухполостньм демпфером с переменной плошддью проходного сечения, увеличивающейся в обе стороны от середины его поршня, установленным на корпусе и одной стороной связанным с золотником гидррраспределителя, а другой -стороной - с маятником через упругий элемент, при этом проходное сечение первого демпфера выполнено уменьшающимся в обе стороны от середины его поршня.
3S
20
.w
фиг.2
ГЭ 21
15
efJuf.
| Автомат-стабилизатор крутосклонного транспортного средства | 1982 |
|
SU1062029A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
