СО со со
ел 1чЭ -ч
1139952
изобретение относится к машиностроению, в частности к пневмоприводам возвратно-поступательного перемещения.
Цель изобретения - повьппение точности по.зидионирования и быстродействия.
На чертеже представлена схема устройства, реализующего предлагаемый способ.
Устройство содержит цилиндр 1, поршень 2- со штоком 3, установленный в нем с образованием полостей 4 и 5. На штоке 3 установлен датчик 6 для измерения текущей координаты. В под- j водящих и отводящих каналах 7 и 8 установлены дроссели 9 и 10 с регулируемой при помощи управляющих элементов
10
11 и 12
соответствен
площадью г , г 2 проходных сечений. Управляющие элементы 11 и 12 и датчик 6 подключены к системе управления (не показана).
Способ управления осуществляется следующим образом.
Путем подачи в полости 4 и 5 цилиндра 1 и выпуска из. них сжатого. воздуха под давлением через соответствующие каналы 7 и 8 осуществляют перемещение поршня 2 в требуемое положение и его удержание в этом положении. При помощи датчика 6, установленного на штоке 3 цилиндра 1, осуществляют измерение величины линейного перемещения поршня 2 на протяжении полного его хода Н. При этом дополнительно определяют ртнощение текущей величины X линейного перемещения порщня 2 от крайнего начального положения X j в цилиндре к величине разности полного хода Н и этой теку- щей величины х.
j
0
,
20
25
30
35
Одновременно с этим в зависимости от найденного отношения посредством управляющих элементов 11 и 12, управ- ляемык от системы управления, изменяют площади f и f2 проходных сече- НИИ дросселей 9 и 10. При этом со- - ответственно увеличивают площадь проходного сечения дросселя 9 в канале 7, сообщенном с полостью 4, объем которой в данный момент возрастает, и уменьшают площадь проходного сечения дросселя 10, сообщенного с полостью 5, объем которой в данный момент уменьшается.
Формула изобретения
Способ управления позиционным релейным пневмоприводом путем изменения количества сжатого воздуха, поступающего в полости пневмопривода и выпускаемого из них путем дросселирования через проходные отверстия подводящих и отводящих каналов с регулируемой площадью проходного сечения, отличающийся тем, что, с целью повьщ ения точности позиционирования и быстродействия, определяют величину текущей координаты и отношение этой величины к величине разности полного хода и текущей координаты и в зависимости от этих величин одновременно изменяют площади проходных сечений обеих полостей, причем уменьшают площадь проходного сечения полости, уменьшающейся при движении поршня, и увеличивают площадь сечения проходного отверстия увеличивающейся полости.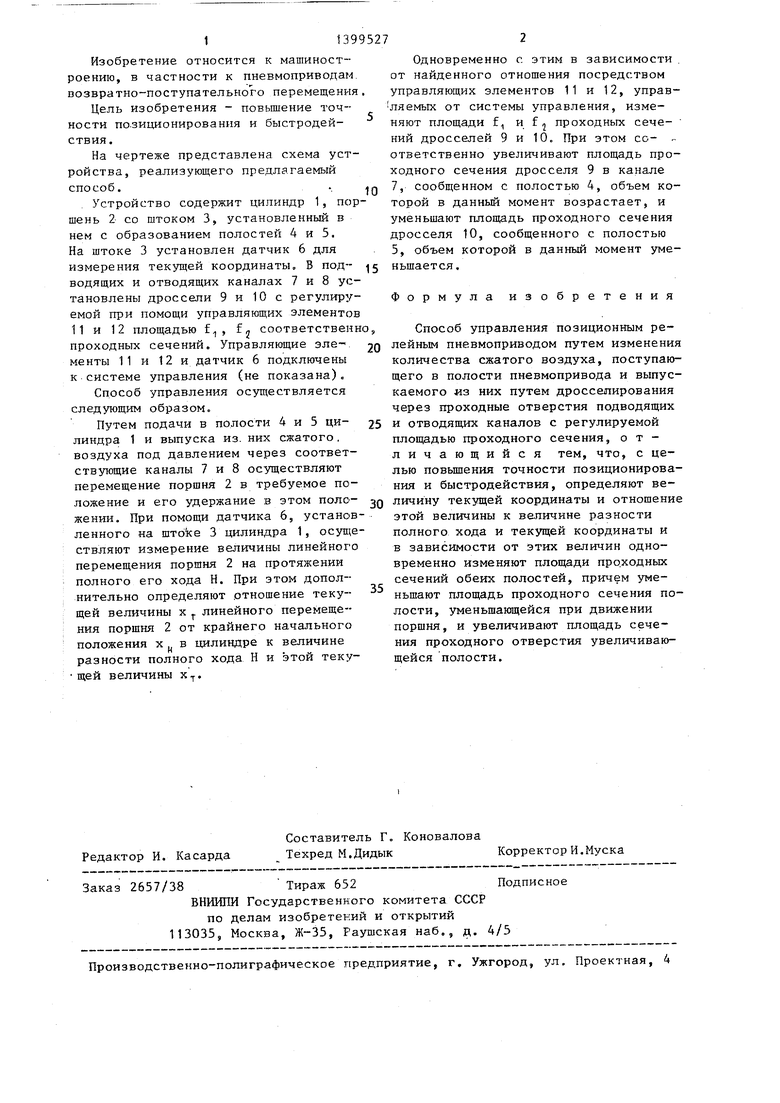
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления позиционным пневмоприводом | 1989 |
|
SU1716200A1 |
| СПОСОБ УПРАВЛЕНИЯ РУЛЕВЫМ ПНЕВМОПРИВОДОМ УПРАВЛЯЕМОЙ РАКЕТЫ И РУЛЕВОЙ ПНЕВМОПРИВОД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2254501C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ ВИБРОСТЕНДА | 2017 |
|
RU2671928C1 |
| ГИДРОЗАМОК | 1997 |
|
RU2132005C1 |
| СПОСОБ ИМИТАЦИИ УСЛОВИЙ СТАРТА РАКЕТЫ ИЗ ПУСКОВОЙ УСТАНОВКИ ПОДВОДНОЙ ЛОДКИ В НАЗЕМНЫХ УСЛОВИЯХ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569203C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СЕКТОРНЫМ ПРИЖИМОМ ШТАМПА ДЛЯ ЛИСТОВОЙ ШТАМПОВКИ | 2019 |
|
RU2723857C1 |
| Позиционный пневмопривод | 1989 |
|
SU1642100A1 |
| Промышленный робот | 1986 |
|
SU1360978A1 |
| Реверсивный позиционный пневмогидравлический привод | 1974 |
|
SU465864A1 |
| ДРОССЕЛЬ ДЛЯ ИСПЫТАНИЙ КОМПРЕССОРОВ | 2005 |
|
RU2302621C1 |
Изобретение относится к приводам возвратно-поступательного перемещения. Цель изобретения - повышение точности позиционирования и быстродействия привода. Перемещение поршня 2 и его позиционирование осуществляют путем дросселирования сжатого воздуха, поступающего и вьшускаемого из полостей 4, 5 пневмопривода, изменением площади проходного сечения (ППС) дросселей 9 и 10. При помощи датчика 6, установленного на поршне 2, определяют величину линейного перемещения поршня и текущей координаты (ТК) и в зависимости от отношения ТК к разности полного хода и ТК одновременно изменяют ППС дросселей 9 и tO при помощи управляющих элементов 11 и 12 системы управления. При этом уменьшают ППС дросселя той полости, которая уменьшается при движении поршня, и увелич-ивают ППС дросселя увеличивающейся полости. 1 ил.
| Тормозные устройства пневмоприводов промышленных роботов | |||
| - Обзор | |||
| Под ред | |||
| И.Б | |||
| Филипова, М., НИИмаш, 1984, с | |||
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
