сл
с

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РУЛЕВЫМ ПНЕВМОПРИВОДОМ УПРАВЛЯЕМОЙ РАКЕТЫ И РУЛЕВОЙ ПНЕВМОПРИВОД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2254501C2 |
| Способ управления позиционным релейным пневмоприводом | 1986 |
|
SU1399527A1 |
| Преобразователь давления | 1989 |
|
SU1786297A1 |
| Гидроимпульсный привод вибропресса | 1989 |
|
SU1697969A1 |
| ВЕНТИЛЬ С ПОДАЧЕЙ СРЕДЫ ПОД ЗАПОРНЫЙ ОРГАН | 1992 |
|
RU2100682C1 |
| Многопозиционный электропневматический привод | 1981 |
|
SU954643A1 |
| Позиционный пневмопривод | 1989 |
|
SU1642100A1 |
| Способ бесконтактных уплотнений подвижных соединений Л.В.Карсавина и устройство для осуществления способа Л.В.Карсавина | 1988 |
|
SU1645693A1 |
| Способ вихретокового контроля | 1988 |
|
SU1647375A1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ МОДУЛЯ ЧИСЛА В СИСТЕМЕ ОСТАТОЧНЫХ КЛАССОВ | 1973 |
|
SU409219A1 |
Изобретение м.б. использовано в пневмоприводах возврата поступательного перемещения.. Цель изобретения -повышение быстродействия привода. Управление позиционным пневмоприводом осуществляется путем изменения количества сжатого воздуха, поступающего в полости одноштокового пневмоцилиндра и выпускаемого из них путем дросселирования через проходные сечения подводящих и отводящих каналов с регулируемой по положению поршня пневмоцилиндра площадью сечения, при этом площадь одного из каналов постоянна, а второго - переменная и определяется по представленным математическим зависимостям. В результате осуществляется перемещение поршня пневмоцилиндра по требуемому наперед заданному закону. 4 ил.
Изобретение относится к области машиностроения, в частности к средствам гид- ропневмоавтоматики и может быть использовано в пневмоприводах возвратно-поступательного перемещения.
Целью изобретения является повышение быстродействия привода.
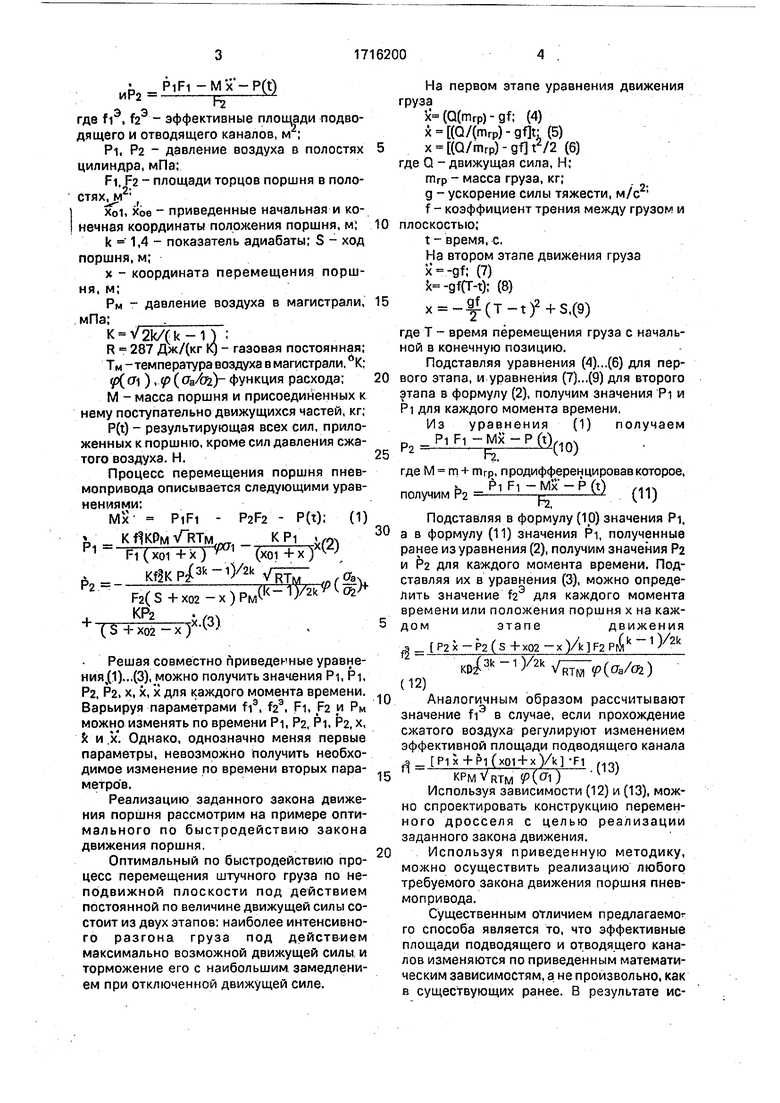
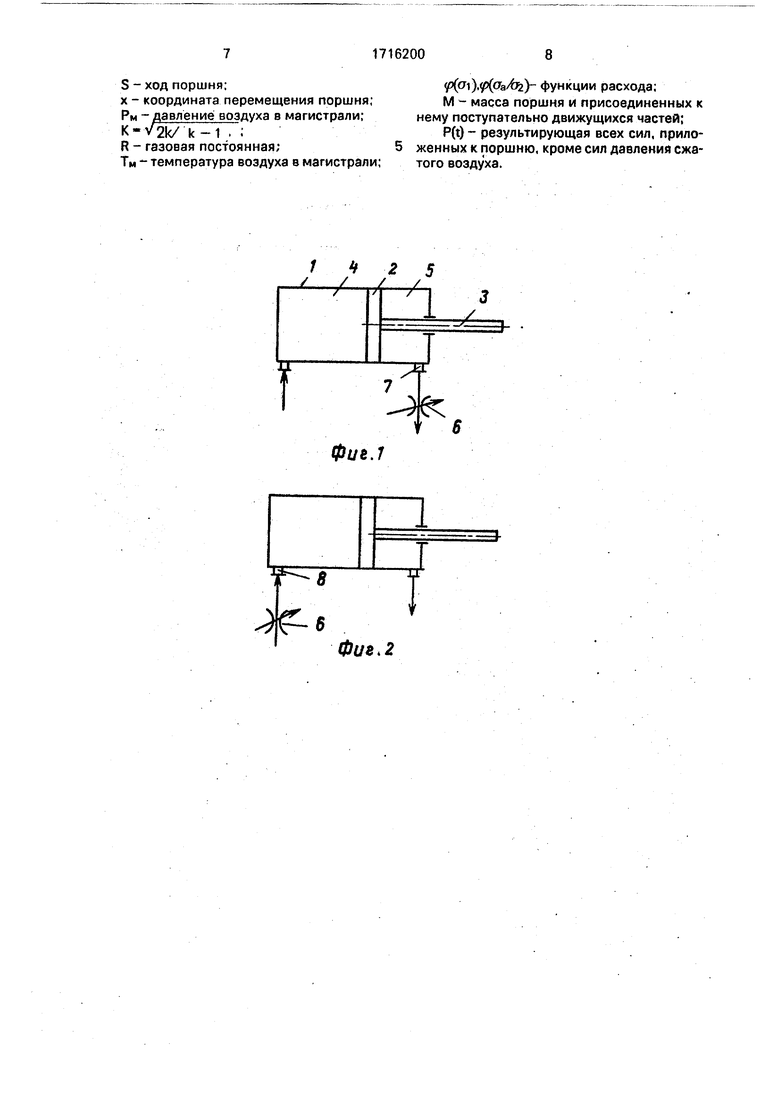
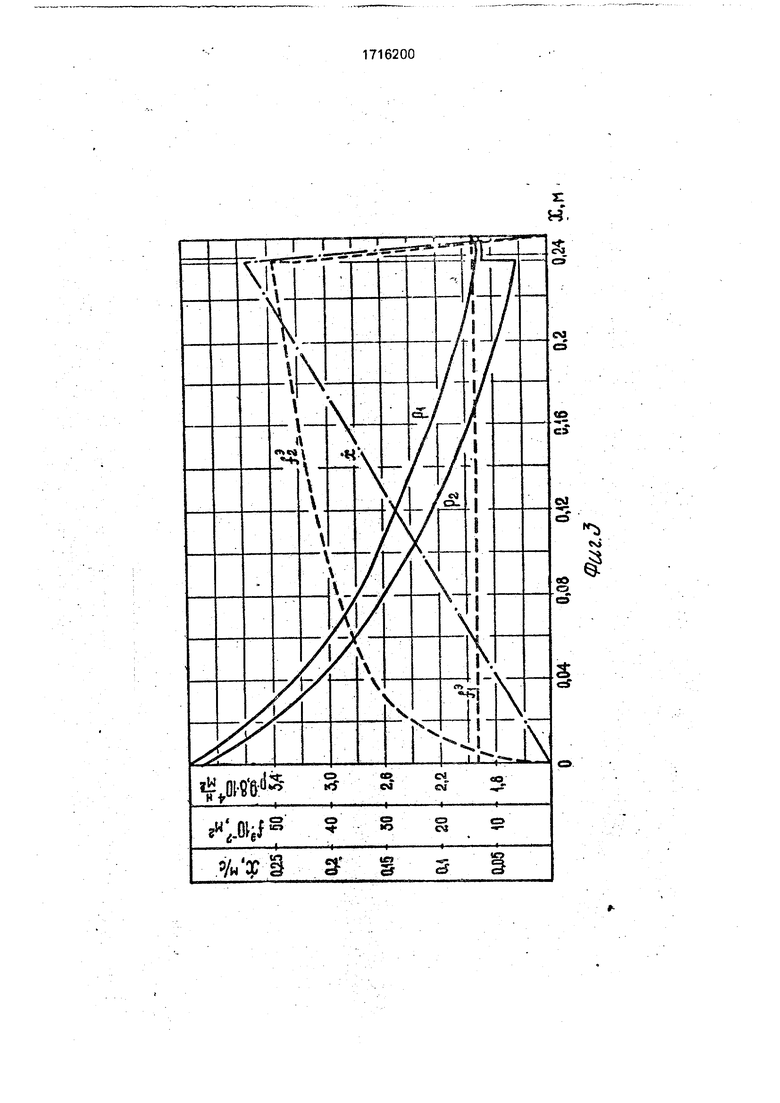
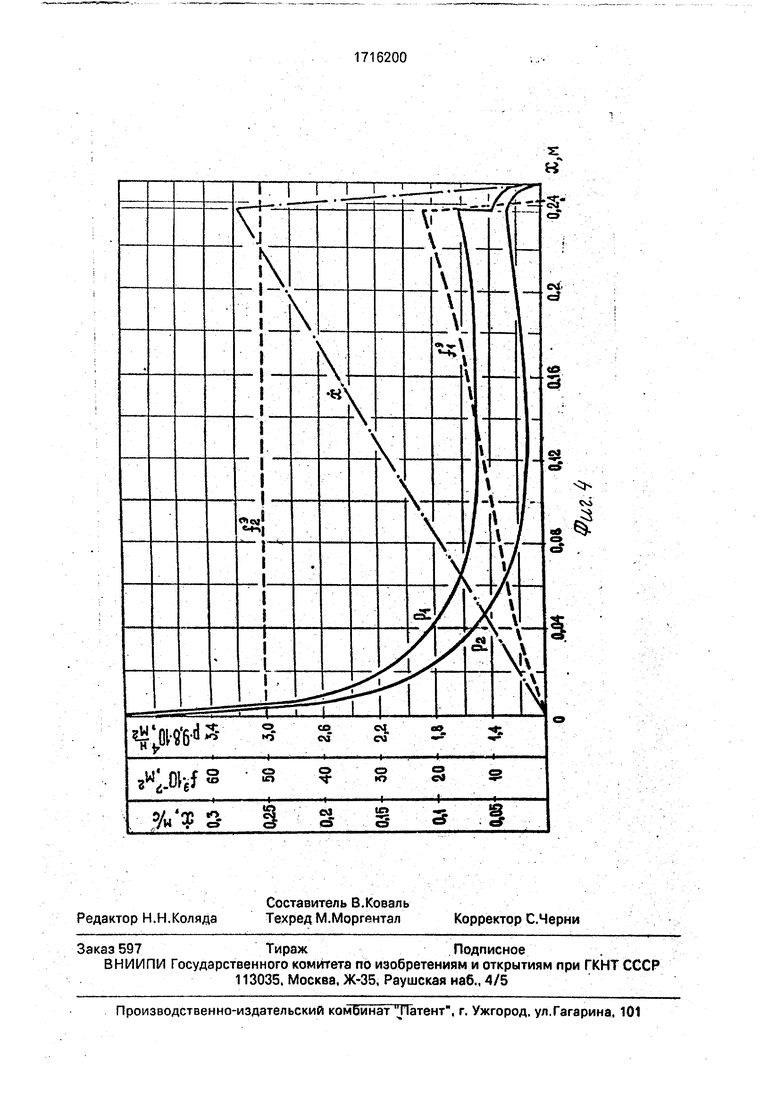
На фиг. 1 представлена принципиальная схема управления позиционным пневмоприводом при дросселировании на выходе из штоковой полости; на фиг. 2 to же, но при дросселировании на входе в поршневую полость; на фиг. 3 - графически представлены результаты расчета оптимального по быстродействию процесса перемещения груза пневмоприводом при дросселировании отводящего канала; на фиг, 4 - то же, но при дросселировании подводящего канала.
Способ управления позиционным пневмоприводом осуществляется путем изменения количества сжатого воздуха, поступающие в полости пневмоцилиндра и выпускаемые из них путем дросселирования через проходные отверстия подводящих и отводя- . щих каналов с регулируемой площадью проходных сечений. Подача и отвод сжатого воздуха в полости пневмоцилиндра регулируют в зависимости от положения поршня, при этомг эффективная площадь одного из каналов постоянная, а второго переменная и определяются зависимостями
f- Р2 х - Р2 (. S + XQ2 - х )Д р2 РМЦ 1 )/2k
иЛ
)/2k()
Pi х + РУ(хр1-Ьх )/k -Fi
KPMVpTM p(a)
(
ю о о
а давление воздуха и скорость его измене ния в полостях цилиндра связаны эависимо- D PiFi -Mx-P(t)
СТЯМИР2 гi-i
PiFi-Mx-P(t)
где fi , f2 - эффективные площади подводящего и отводящего каналов, м ;
Pi, P2 - давление воздуха в полостях цилиндра, мПа;
Fi, F2 - площади торцов поршня в полостях, м ,
xoi, хЬе - приведенные начальная и конечная координаты положения поршня, м;
k 1,4 - показатель адиабаты; S - ход поршня, м;
х - координата перемещения поршня, м;
Рм - давление воздуха в магистрали, мПа;
K V2k/(k-1) .:
R 287 Дж/(кг К) - газовая постоянная;
Тм -температура воздуха в магистрали, 6К;
tp{ tJi ), р ( aa/ai)r Функция расхода;
М - масса поршня и присоединенных к нему поступательно движущихся частей, кг;
P(t) - результирующая всех сил, приложенных к поршню, кроме сил давления сжатого воздуха. Н.
Процесс перемещения поршня пневмопривода описывается следующими уравнениями:Мх
Р1
Р2 PiFi - P2F2 - P(t);
КЯКРмУ Тм KPi Fi(xoi+x) 1 (xoi + x)
№Рг()/2
;(2)
F2(S+xo2-x)PM( KP2 ,x.(3)
(S4-X02-X/
«x
Решая совместно приведенные уравнения)...(3), можно получить значения PL PL Р2. Р2, х, х, х для каждого момента времени. Варьируя параметрами fi3, f23, Fi. fz и Рм можно изменять по времени Pi, P2, Pi, P2, х, х и х . Однако, однозначно меняя первые параметры, невозможно получить необходимое изменение по времени вторых пара- метро в.
Реализацию заданного закона движения поршня рассмотрим на примере оптимального по быстродействию закона движения поршня.
Оптимальный по быстродействию процесс перемещения штучного груза по неподвижной плоскости под действием постоянной по величине движущей силы состоит из двух этапов: наиболее интенсивного разгона груза под действием максимально возможной движущей силы, и торможение его с наибольшим замедлением при отключенной движущей силе.
0
5
0
5
На первом этапе уравнения движения груза
x(Q(mrP)-gf; (4)
x (Q/(mrp) (5)
х (Q/mrp) - gfj tV2 (6) где Q - движущая сила, Н;
mrp - масса груза, кг;
g - ускорение силы тяжести, м/с2
f - коэффициент трения между грузом и плоскостью;
t - время, с.
На втором этапе движения груза
x-.-gf: (7)
(T-t); (8)
x -(T-t)2+S,(9)
где Т - время перемещения груза с начальной в конечную позицию.
Подставляя уравнения (4)...(6) для первого этапа, и уравнения (7)...(9) для второго этапа в формулу (2), получим значения Pi и Pi для каждого момента времени.
Из уравнения (1) получаем Р2 P1 F1 - Мх - Р (t)(1Q)
где М m + mrp, продифференцировав которое, Pi Fi - MX - Р (t)
получим Р2
ъ
(11)
0
5
0
RIM p()
Подставляя в формулу (10) значения Pi, а в формулу (11) значения Pi, полученные ранее из уравнения (2), получим значения Р2 и Р2 для каждого момента времени. Подставляя их в уравнения (3), можно определить значение f23 для каждого момента времени или положения поршня х на каждомэтапедвижения
P2X-P2(S +XQ2 -x)/ l 3F2P№k 1 )/2k
(12)
Аналогичным образом рассчитывают значение fi3 в случае, если прохождение сжатого воздуха регулируют изменением эффективной площади подводящего канала
f3 -Л р1х +Pl(xQ1 + x)/k Pi ,
KPMVRTM p(ai) U Используя зависимости (12) и (13), можно спроектировать конструкцию переменного дросселя с целью реализации заданного закона движения.
Используя приведенную методику, можно осуществить реализацию любого требуемого закона движения поршня пневмопривода.
Существенным отличием предлагаемо го способа является то, что эффективные площади подводящего и отводящего каналов изменяются по приведенным математическим зависимостям, а не произвольно, как в существующих ранее. В результате использования предлагаемого способа осущё- ствляется перемещение поршня пневмопривода по требуемому наперед заданному закону, что может обеспечить точность по- зиционирования, заданное быстродействие или производительность пневмопривода, уменьшение динамических нагрузок на поршень и др.
На фиг. 3 и 4 графически представлены результаты расчета оптимального по быстродействию процесса перемещения груза пневмоприводом при дросселировании подводного или отводного каналов при следующих исходных данных: Q 60,8 Н; mrp 19,6Kr;f 0,3; S 0.25м; fi 31-10 4 м2; F2 28-10 4 м2; xoi хо2 0,05 м; m 3 кг - масса подвижных частей пневмоцилиндр а; Pp(t) 139,65 Н - результирующая сил сопротивления на этапе разгона; Pt(t) 78,43 Н - результирующая сил сопротивления на этапе торможения- Тм 293 К; Рм 39,24-104 Н/м2; fi3 1, м2 (для фиг.З); h м2 (для фиг.4.
Устройство, реализующее предложенный способ, (фиг. 1,2) содержит пневмоци- линдр 1, внутри которого размещается поршень 2, соединенный со штоком 3 и образующий поршневую и штоковую полости 4 и 5. Регулируемый дроссель 6 подключается к каналу 7 при дросселировании штоко- вой полости 5 и к каналу 9 при дросселировании поршневой полости 4. Эффективная площадь сечения каналов 7 и 8 изменяется в зависимости от текущей координаты поршня 2 по приведенным выше зависимостям.
На фиг. 1 изображен пример управления дросселированием отверстия подвода- отвода воздуха штоковой полости 5.-В данном случае, если рабочей полостью является поршневая полость 4. то дросселирр- вание осуществляется отводящим каналом 7, а его эффективная площадь определяется зависимостью
ft - P2X-P2(S. + XQ2 -x)/k F2P|ftk 1) 2k )/2kvr-p(tTa/02)
Если рабочей полостью является штоко- вая полость 5, то дросселирование осуществляется подводящим каналом 7, а его эффективная площадь определяется зависимостью
« IPlx+Pl(xD1 + x)A -F1
KPMVRTM p(ai)
На фиг. 2 изображен пример управле ния дросселированием отверстия подвода- отвода воздуха поршневой полости 4. В
данном случае, если рабочей полостью является поршневая полость 4, то дросселирование осуществляется подводящим каналом 8, а его эффективная площадь определяется зависимостью ч
ft -f Pi(xoi + x)A -Fi KPMVRTM p(7i)
8 случае, если рабочей полостью является штоковая полость 5, то дросселирование осуществляется отводящим каналом , а его эффективная площадь определяется зависимостью
f| - L.P2 х -- Р2 (S +XQ2 x )/k F2 Р 1 k )/2kvW y(a/)
Использование настоящего устройства позволит обеспечить реализацию требуе лого наперед заданного закона движения поршня 2 пневмопривода, что позволит в каждом конкретном случае обеспечить точность позиционирования, повысить быстродействие или производительность, повысить надежность работы пневмопривода.
Формула изобретения Способ управления позиционным пневмоприводом путем изменения количества сжатого воздуха, поступающего в полости одноштокового пневмоцилиндра и выпускаемого из них путем дросселирования через проходные сечения подводящих и отводящих каналов с регулируемой по положению поршня пневмоцилиндра площадью сечения, отличающийся тем, что, с целью повышения быстродействия привода, эффективную площадь сечения одного из каналов выбирают постоянной, а второго - изменяют в соответствии с зависимостью
f| P2x-P2(s+x02-x)/k F2Pf6k y)/2k
() :
f9 Pix -P-i (api +х)/к- Fi
КРм )
при этом давление воздуха и скорость его изменения в полостях цилиндра выбирают в соответствии с зависимостями
Р2 Р2-ЬЬ
PiFi -Mx- P(t) F2
M P(t) TT
где fi , fz - эффективные площади подводящего и отводящего каналов;
Pi, Рг давление воздуха в полостях цилиндра;
Fi, F2 - площади торцов поршня;
xoi; xo2 - приведенные начальная и конечная координаты положения поршня;
k 1,4 - показатель адиабаты;
S - ход поршня;
х - координата перемещения поршня;
-V2
R - газовая постоянная; Тм - температура воздуха в магистрали;
Рм -давление воздуха в магистрали; K-V2k/ k-1 :
/ Ч 2 5
/ / / /
Т
фие.7
8 б
p(o)(aaAfiY функции расхода;
М - масса поршня и присоединенных к нему поступательно движущихся частей;
P(t) - результирующая всех сил, прило- женных к поршню, кроме сил давления сжатого воздуха.
J. /
ф.
1
.
t /« Ґ
ICT
Э
П
В.
о
OJ
Ъ
«N
H
iuE
I - A
ю
a
| Филипов И.Б | |||
| и др | |||
| Системы позиционирования рабочих органов промышленных роботов с пневмоприводами | |||
| М.: НИИмаш, 1983, с | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
