Изобретение относится к машиностроению, а именно к промышленным роботам для автоматизации технологических процессов.
Цель изобретения - повышение точное- ти позиционирования за счет обеспечения плавного останова механической руки в каждом из фиксированных по углу поворота положений.
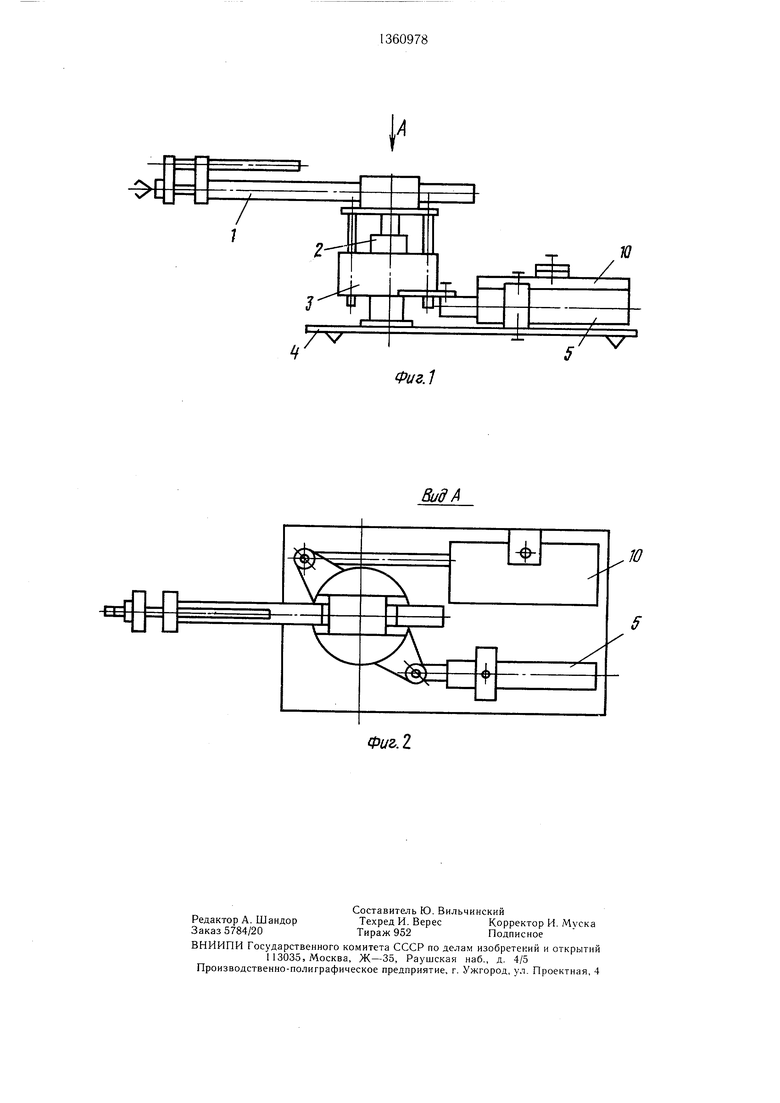
На фиг. 1 показан робот, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - схема механизма поворота руки.
Промышленный робот содержит механическую руку 1, механизм 2 ее подъема, .механизм 3 поворота, основание 4, сдвоен- ный приводной цилиндр 5 с поршнями 6 и 7 и полостями 8 и 9, тормозной гидроцилиндр 10 с поршнем И и полостями 12 и 13, регулируемый дроссель 14, обратные клапаны 15 и 16, золотник 17 с плунжером 18, каналы 19-22 с большими, чем у дросселя, проходными сечениями, управляюш.ий пнев- моцилиндр с поршнями 23 и 24 и полостями 25 и 26, трубопроводы 27-29. Цилиндры 5 и 10 связаны с основанием 4 шарнирно.
Робот работает следующим образом.
Подачей сжатого воздуха в трубопровод 29 обеспечивается исходное положение поршней 6 и 7 цилиндра 5, а также поршней 23 и 24 управляющего цилиндра, которые располагаются у перегородки, разделяющей этот цилиндр на две части, размеры которых в осевом направлении соответствуют размерам в осевом направлении полостей 8 и 9 цилиндра 5.
При подаче сжатого воздуха в трубопровод 27 и далее в полость 25 управляющего цилиндра перемещается влево до упо- ра в торец цилиндра поршень 23 с плунжером 18, который устанавливается проточкой напротив канала 21. Одновременно с этим сжатый воздух поступает в полость 8 цилиндра 5, поршень 6 которого преодолевает усилие противодавления за счет раз- ности рабочих площадей порш.ней со стороны штоковой и бесштоковой полостей, перемещает порщень 7 со штоком вправо, осуществляя вращение поворотного элемента, на котором установлена рука робота, по ча- совой стрелке и смещение поршня 11 влево. Масло из полости 13 перетекает через канал 21 и кольцевую проточку плунжера 18 в полость 12. Когда поршень 11 перекроет канал 21, масло из полости 13 начинает перетекать в полость 12 через регулируемый дроссель 14, при этом начинается торможение поворота руки 1.
Меняя величину проходного сечения дросселя, можно регулировать скорость торможения.
0
5 0
5
о
5 0 .с 0
При подаче сжатого воздуха в трубопровод 28 гильза управляющего цилиндра перемещается влево относительно зафиксированного штока поршня 24, осуществляя перемещение в этом же направлении поршня 23 с плунжером 18, в результате чего проточка на плунжере устанавливается напротив канала 20. Параллельно сжатый воздух поступает в полость 9 цилиндра 5, который осуществляет поворот руки на больщий угол, чем в первом случае.
Торможение происходит аналогичным образом. При подаче воздуха одновременно в трубопроводы 27-29 в силу разности площадей поршней 23 и 24 управляющего цилиндра со стороны штоковых и бесштоко- вых полостей происходит смещение плунжера 18 влево на максимальную величину, обеспечивающую расположение проточки напротив канала 19, при этом щток цилиндра 5 выдвигается на величину, равную сумме перемещений его поршней 6 и 7.
Возврат поршней цилиндров в исходное положение осуществляется отключением подачи воздуха в трубопровод 27 или 28 и подачей воздуха в щтоковые полости цилиндра 5 и управляющего цилиндра по трубопроводу 29. Обратные клапаны 15 и 16 служат для устранения перетечки масла через сливные трубопроводы, в которые они встроены, при прямом и обратном ходах поршня 11. Давление воздуха, подаваемого в трубопроводы 27-29, одинаковое.
Формула изобретения
Промышленный робот, содержащий основание и смонтированные на нем механическую руку, механизмы ее подъема и поворота, последний из которых состоит из поворотного элемента и кинематически связанных с ним штоков двух силовых цилиндров, и цикловую систему управления, отличающийся тем, что, с целью повышения точности позиционирования путем обеспечения плавного останова механической руки в каждом из фиксированных по углу поворота положений, один из упомянутых цилиндров, приводной, выполнен в виде сдвоенного силового цилиндра с последовательно расположенными в одной гильзе поршнями, а другой, тормозной, снабжен магистралью, имеющей регулируемый дроссель и соединяющей его штоковую и внещтоковую полости, кроме того, механизм поворота снабжен гидрораспределителем, состоящим из корпуса с золотником, имеющим проточку, и управляющего цилиндра, шток которого жестко связан с этим золотником, при этом полости приводного и управляющего цилиндров связаны между собой.
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционирования руки промышленного робота | 1980 |
|
SU906687A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК | 1994 |
|
RU2105653C1 |
| Пневмогидравлический привод | 1983 |
|
SU1114821A2 |
| Пневмогидравлический привод | 1979 |
|
SU821759A1 |
| Устройство для подачи заготовок | 1985 |
|
SU1220717A2 |
| Устройство для исследования процесса вытеснения нефти из образцов пористых пород | 1986 |
|
SU1382941A1 |
| Промышленный робот | 1984 |
|
SU1684019A1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906664A1 |
| Гидропанель управления реверсом привода ползуна и приводом подач | 1974 |
|
SU566976A1 |
Изобретение относится к машиностроению, а именно к промышленным роботам для автоматизации технологических процессов. Цель изобретения - повышение точности позиционирования за счет обеспечения плавного останова .механической руки в каждом из фиксированных по углу поворота положений. При подаче сжатого воздуха в полость 8 приводного цилиндра 5 его шток выдвигается и поворачивает элемент, на котором смонтирована механическая рука. Одновременно с этим управляюшнй цилиндр перемешает плунжер 18 с золотником, проточка которого размешается напротив канала 21, при этом масло из полости 13 тормозного цилиндра перетекает в полость 12 через указанные канал и проточку. При подходе к фиксированному по углу поворота положению руки канал 21 перекрывается поршнем 11 и масло перетекает между полостями 13 и 12 через дроссель 14, чем обеспечивается плавный останов руки. 3 ил. СО С5 о со vj оо 2Э L28 Фиг.З
| Промышленный робот | 1974 |
|
SU503712A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
