Изобретение относится к робототехнике, в частности к манипуляторам, предназначенным для работы в труднодоступных местах, характеризую- щихся узкими искривленными пространствами.
Цель изобретения - расширение технологических возможностей за счет увеличений зоны манипулирования.
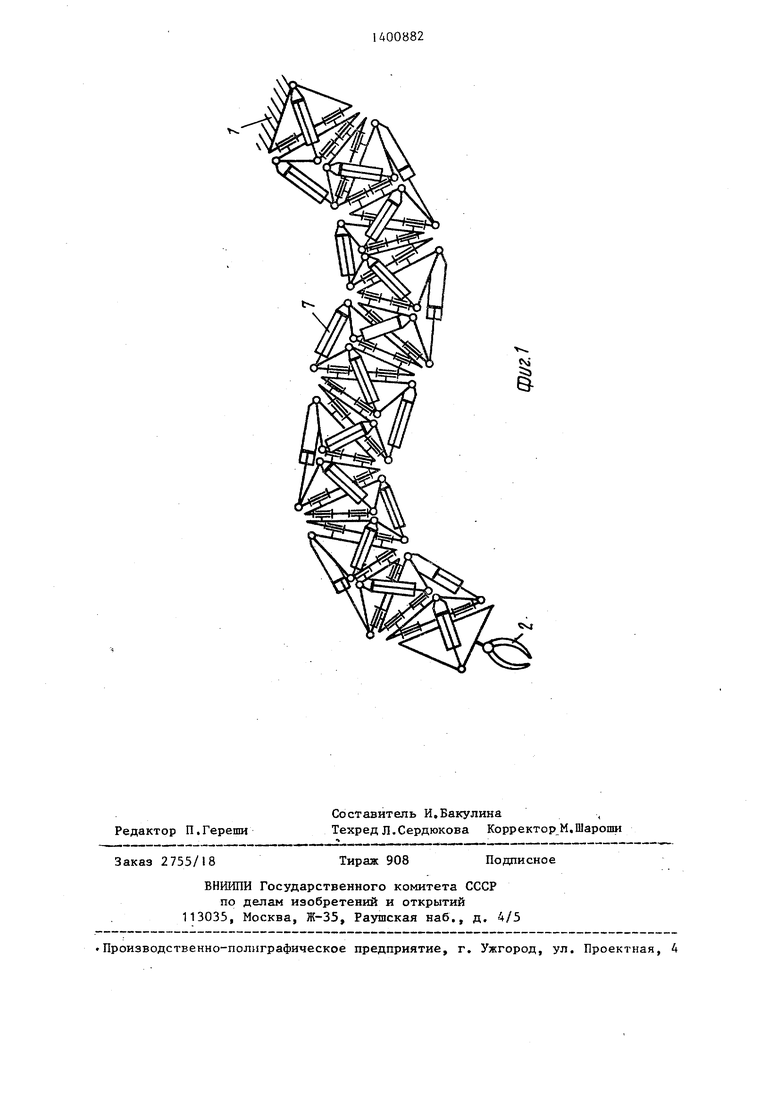
На фиг,1 изображен манипулятор, общий вид; на фиг,2 - соединение звеньев манипулятора.
Манипулятор содержит основание и рабочий орган 2, связанные между собой последовательно шарнирно соединенными аналогичными звеньями 3 - 6 и приводами 7 поступательного перемещения. Звенья 3-6 выполнены В виде треугольников, например равнобед- ренньпс прямоугольных треугольников. При монтаже сторона (гипотенуза) 8 треугольного звена 3 шарнирно соединяется со стороной (гипотенузой) 9 звена 4, а сторона (катет) 10 звена 3со стороной (катетом/ другого смежно го звена или со стойкой основания. Аналогично сторона (катет) 11 треуголного звена 4 шарнирно соединена с соответствующей стороной (катетом) 12 звена 5, а сторона (гипотенуза) 13 звена 5 связана со стороной (гипотенузой) 14 звена 6, Сторона (катет) 15 звена 6 шарнирно соединяется со стороной (катетом) следующего звена или с рабочим звеном. Свободные вершины 1 и 17 в паре последовательно расположенных треугольников, удаленные от осей шарнирных соединений сторон звеньев, шарнирно связаны между собой приводами 7 поступательного перемещения ,
Манипулятор работает следуюш 1м образом.
Одновременное и одинаковое втягивание штоков всех приводов 7 поступательных перемещений приводит к сжиманию манипулятора, обратный ход штоков - к его вытягиванию. При неодинаковых ходах штоков приводов 7 поступательных перемещений манипулятор получает определенное изогнутое положение. Управляя ходом штоков приводов 7 поступательных перемещений, можно придать манипулятору любую пространственную форму, что позволяет ему работать в труднодоступны и ограниченных пространствах.
Формула изобрете ния
1,Манипулятор, содержаш11Й основание и рабочий орган, связанные между собой последовательно шарнирно соединен-
звеньями и приводами поступательного перемещения,отличающий- с я тем,что, с целью распшрения техно. логических возможностей за счет увеличения зоны манипулирования, звенья выполнены в виде треугольников, причем две стороны в каждой паре последовательно расположенных треугольников шарнирно соединены между собой, а их свободные вершины шарнирно связаны между собой соответствующими приводами поступательного перемещения,
2.Манипулятор по п„1, о т л и - чающийся тем, что звенья вьшолнены в виде равнобедренных прямоугольных треугольников.
CM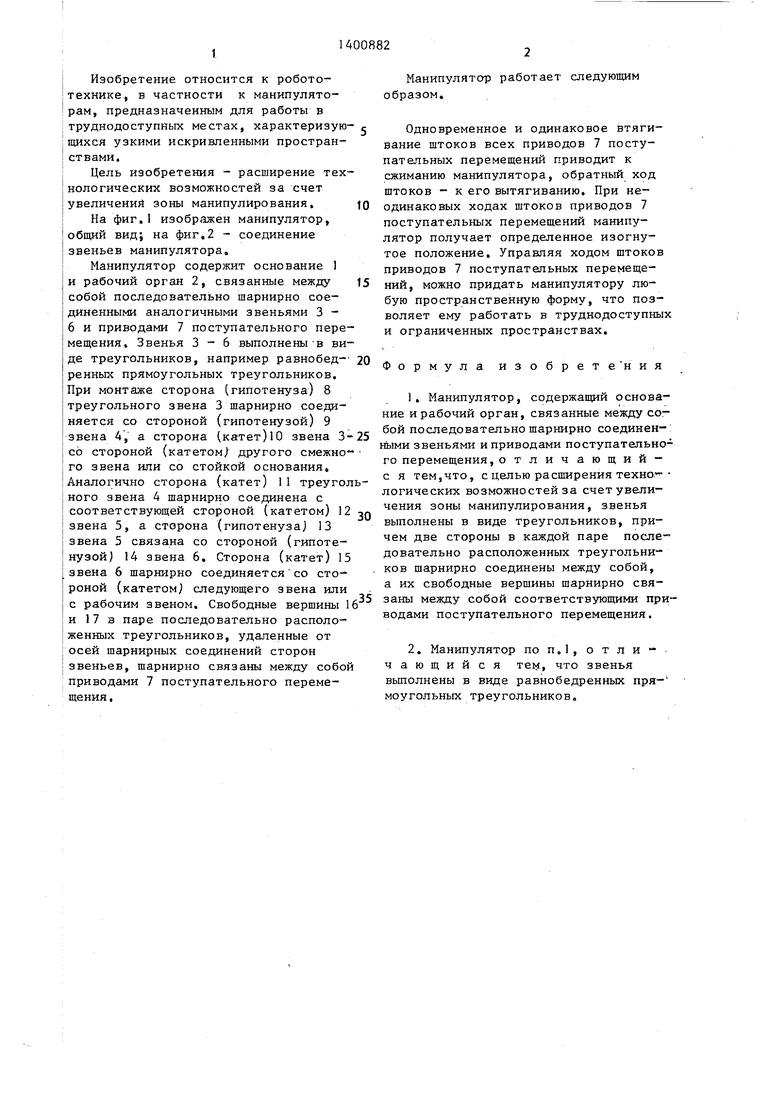
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор-трипод промышленного назначения | 2017 |
|
RU2651781C1 |
| ТРЁХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2024 |
|
RU2835540C1 |
| Робот-погрузчик сеток с овощами | 2019 |
|
RU2722747C1 |
| Трансформируемое энергоактивное здание | 1989 |
|
SU1742440A1 |
| Робот-манипулятор | 2018 |
|
RU2700304C1 |
| СПОСОБЫ ДЛЯ ГРАФИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОКРУЖНОСТИ И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2154805C2 |
| ПЛАНИРУЮЩИЙ ПАРАШЮТ | 2000 |
|
RU2199471C2 |
| Механическая рука манипулятора | 1985 |
|
SU1283076A1 |
| Щековая дробилка | 2016 |
|
RU2625181C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОЙ ЭВАКУАЦИИ НА БАЗЕ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2024 |
|
RU2838648C1 |
Изобретение относится к робототехнике, в частности к манипуляторам, предназначенным для работы в труднодоступных местах, характеризующихся узкими.искривленными пространствами, Целью изобретения является расширение технологических возможностей за S in 75счет увеличения зоны манипулирования Для этого в манипуляторе основание и рабочий орган связаны между собой последовательно ширнирно соединенными аналогичными звеньями 3 - 6 и приводами 7 поступательного перемещения. Звенья 3-6 выполнены в виде треугольников, например равнобедренных прямоугольных треугольников. Гипотенуза 8 треугольного звена 3 шар- нирно соединена с гипотенузой 9 звена 4, катет 11 звена-4 - с катетом 2 звена 5. Свободные вершины 16 и 17 в паре последовательно расположенных треугольников, удаленные от осей шарнирных соединений катетов звеньев, шарнирно связаны между собой приводами 7 поступательного перемещения, 1 з.п, ф-лы, 2 ил. (С (Л С
| Авторское свидетельство СССР № , кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
