Изобретение относится к пространственным манипуляторам параллельной структуры и может найти применения в автоматических технологических и сборочных линиях, робототехнике и обрабатывающих центрах для выполнения групповых операций несколькими рабочими органами.
Известен пространственный манипулятор с тремя степенями свободы, содержащий основание и приводную от трех двигателей подвижную платформу с одним рабочим органом и стержневыми опорами (схема в статье: Мирзаев Р.А. и др. «Исследование кинематики манипулятора параллельной структуры (дельта-механизм)//журнал «Вестник Сибирского гос. Аэрокосмического ун-та, 2012, Вып. 4, с. 1 (схема), рис. 4 (рабочая зона)) - аналог.
Недостатками известного манипулятора являются сложность конструкции и системы управления двигателями с их связанной кинематикой, а также узкая рабочая зона из-за ограниченного до трех числа степеней свободы.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является пространственный манипулятор, содержащий платформу с одним рабочим органом и основание, соединенные между собой посредством шести подвижных опор и двенадцати сложных сферических шарниров с приводом от шести двигателей (книга Вульфсон И.И. и др. «Механика машин», Москва: Высшая школа, 1996, с. 28, рис. 1.20 со схемой «Платформа Стюарта») - прототип.
Недостатками указанного манипулятора являются:
1. Сложность конструкции и системы управления одновременно всеми шестью приводными двигателями со связанной кинематикой движений.
2. Узкая рабочая зона из-за возникающих неуправляемых и мертвых положений выходной платформы с одним рабочим органом и связанной кинематикой ее движений в рабочем пространстве.
3. Ограниченные функциональные возможности только одной приводной платформы с рабочим органом препятствуют применению манипулятора в групповых технологиях, требующих взаимосвязанной работы нескольких рабочих органов.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции и системы управления за счет раздельной кинематики движений, расширения рабочего пространства и эксплуатационных возможностей применения манипулятора в различных групповых технологиях обработки и сборки за счет выполнения платформенного устройства в виде трех взаимосвязанных платформ с раздельным приводом разных рабочих органов.
Получение технического результата достигается за счет того, что платформенное устройство выполнено в виде трех треугольных платформ, соединенных между собой через двойной сферический шарнир, основание выполнено в виде многошарнирного звена, а каждая из упомянутых платформ соединена с основанием посредством попарно установленных на каждой из платформ двух приводных двухзвенных опор, для образования трехплатформенного манипулятора с шестью управляемыми степенями свободы.
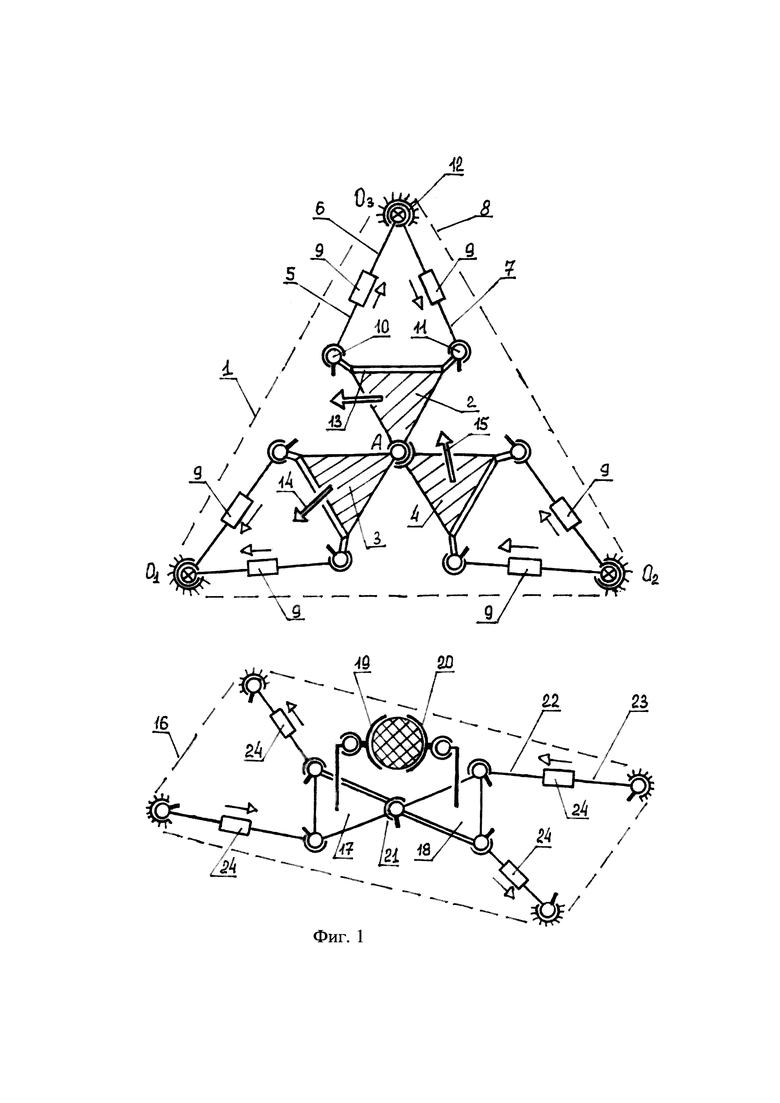
В схеме манипулятора на фиг.1 основание 1 выполнено в виде трехшарнирного равностороннего треугольника О1О2О3, к каждой из трех вершин которого O1, О2 и О3 присоединено по две составных опоры, составленные из двухшарнирных звеньев 5 и 6, 7 и 8, где каждая из этих опор выполнена с поступательной приводной кинематической парой 9 (в виде гидроцилиндра или пневмоцилиндра). В каждой из составных опор звенья 5 и 7 раздельно соединены с каждой из платформ 2, 3 и 4 через двухподвижных вращательных кинематические пары 10 и 11, а звенья 6 и 8 попарно соединены с основанием 1 через четырехподвижное соединительное устройство 12 из двух соосно установленных двухподвижных вращательных кинематических пар. Каждая из трех платформ 2, 3 и 4 выполнена с возможностью установки на ней отдельного рабочего органа 13, 14 и 15.
Для фиксации объекта и изменения его положения при групповых операциях установлено подвижное зажимное устройство, которое выполнено в виде установленного на стойке 16 двухплатформенного зажимного манипулятора, в котором две платформы 17 и 18 с зажимными рабочими органами 19 и 20 соединены между собой через двухподвижную вращательную кинематическую пару 21 и связаны со стойкой 16 через четыре попарно установленных между собой приводные составные двухзвенные опоры, составленные из двухшарнирных звеньев 22 и 23. При этом стойка 16 выполнена в виде четырехшарнирного звена, а звенья опор 22 и 23 выполнены с поступательной приводной кинематической парой 24 и соединены со стойкой 16 и платформами 17 и 18 через двухподвижных вращательные пары.
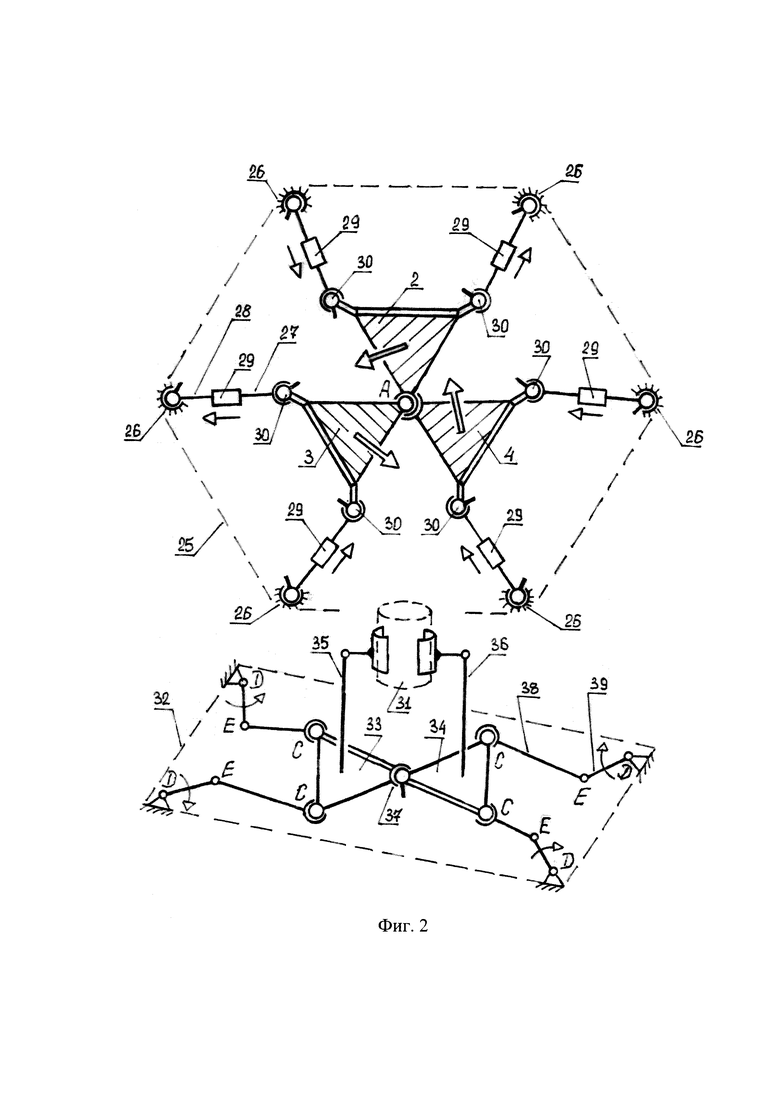
На фиг. 2 представлен вариант выполнения трехплатформенного манипулятора относительного манипулирования, в котором основание 25 и выполнено в виде шестишарнирного равностороннего шестиугольника, к каждой из шести вершин которого через двухподвижную вращательную кинематическую пару 26 присоединена составная опора из звеньев 27 и 28 с приводной поступательной кинематической парой 29, где звено 27 также соединено с одной из платформ 2, 3 и 4 через двухподвижную вращательную кинематическую пару 30. Платформы 2, 3 и 4 соединены между собой через центральный двойной сферический шарнир А, а основание 25 выполнено с возможность его установки на поворотную платформу с приводом.
Для фиксации обрабатываемого или собираемого объекта 31 и изменения его положения при групповых технологиях, установлено подвижное зажимное устройство, выполненное в виде установленного на стойке 32 двухплатформенного зажимного манипулятора, в котором две платформы 33 и 24 с зажимными рабочими органами 35 и 36 соединены между собой через двухподвижную вращательную кинематическую пару 37 и связаны со стойкой 32 через четыре попарно установленные между собой приводные составные двухзвенные опоры, составленные из двухшарнирных звеньев 38 и 39.
Каждая из четырех двухзвенных опор зажимного устройства на фиг. 2 выполнена с установленной на стойке 32 вращательной приводной кинематической парой D и соединена с отдельной платформой через трехподвижный сферический шарнир С, а звенья 38 и 39 соединены между собой при сборке составных опор через одноподвижную вращательную кинематическую пару Е для образования зажимного манипулятора с четырьмя управляемыми степенями свободы.
Работа представленного трехплатформенного манипулятора относительного манипулирования заключается в следующем.
Задаваемое перемещение вращательных или поступательных приводных кинематических пар в трехплатформенном манипуляторе (в указанных на фиг. 1 и фиг. 2) направлениях приводит к раздельной кинематике перемещений каждой из трех платформ с рабочим органов вдоль или вокруг всех трех осей X, Y, Z, что обеспечивает 6 управляемых ступеней свободы относительного перемещения всех рабочих органов.
При этом возможность дополнительного регулируемого перемещения зажатого объекта относительно стойки в двухплатформенном зажимном манипуляторе с четырьмя управляемыми степенями свободы - дополнительно увеличивает до 10 (6+4=10) общее число управляемых степеней свободы, что расширяет рабочее пространство относительного манипулирования без мертвых и неуправляемых положений рабочих органов.
Достигаемый в предлагаемом трехплатформенном манипуляторе технический эффект заключается в следующем:
1. Упрощение конструкции за счет применения для сборки простых вращательных кинематических пар.
2. Упрощение системы управления приводными двигателями манипулятора за счет раздельной кинематики относительных движений каждой из трех платформ с рабочими органами.
3. Расширение рабочего пространства и функциональности манипулятора в групповых операциях за счет увеличения до 10 суммарного числа управляемых ступеней свободы относительного манипулирования рабочих органов зажатого объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2751780C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МАНИПУЛЯТОР-ТРИПОД | 2023 |
|
RU2824543C1 |
| ПЛАТФОРМЕННЫЙ СТЫКОВОЧНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2751781C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| СФЕРИЧЕСКИЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР-ТРИПОД | 2024 |
|
RU2839627C1 |
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758374C1 |
Изобретение относится к области робототехники и может быть использовано в автоматических технологических и сборочных линиях, обрабатывающих центрах для выполнения групповых операций несколькими рабочими органами. Манипулятор содержит основание и расположенные на нем кинематически связанные между собой три тругольные платформы с рабочим органом, при этом упомянутые платформы шарнирно соединены с основанием посредством составных подвижных опор, включающих в себя приводную поступательную кинематическую пару, к которой с двух сторон присоединены соответствующие звенья. При этом упомянутые платформы соединены между собой посредством центрального двойного сферического шарнира, к которому платформы прикреплены соответствующими вершинами, при этом к двум другим вершинам каждой платформы посредством двухподвижных вращательных кинематических пар присоединены своими концами соответствующие звенья составных подвижных опор, а концы других звеньев каждой из упомянутых опор посредством шарнирных соединительных устройств связаны с основанием, причем на каждой из упомянутых платформ установлен отдельный рабочий орган. Использование изобретения позволяет расширить технологические возможности манипулятора. 2 з.п. ф-лы, 2 ил.
1. Трехплатформенный манипулятор, преимущественно для выполнения групповых операций, содержащий основание и расположенные на нем кинематически связанные между собой три тругольные платформы с рабочим органом, при этом упомянутые платформы шарнирно соединены с основанием посредством составных подвижных опор, включающих в себя приводную поступательную кинематическую пару, к которой с двух сторон присоединены соответствующие звенья, отличающийся тем, что упомянутые платформы соединены между собой посредством центрального двойного сферического шарнира, к которому платформы прикреплены соответствующими вершинами, при этом к двум другим вершинам каждой платформы посредством двухподвижных вращательных кинематических пар присоединены своими концами соответствующие звенья составных подвижных опор, а концы других звеньев каждой из упомянутых опор посредством шарнирных соединительных устройств связаны с основанием, причем на каждой из упомянутых платформ установлен отдельный рабочий орган.
2. Трехплатформенный манипулятор по п. 1, отличающийся тем, что основание выполнено в виде равностороннего треугольника, а каждое из упомянутых соединительных устройств расположено в соответствующих вершинах основания и выполнено четырехподвижным и состоящим из двух соосно установленных двухподвижных вращательных кинематических пар, причем к каждому из упомянутых соединительных устройств присоединены концы звеньев двух упомянутых опор.
3. Трехплатформенный манипулятор по п. 1, отличающийся тем, что основание выполнено в виде равностороннего шестиугольника, а каждое из упомянутых соединительных устройств расположено в соответствующих вершинах основания и выполнено в виде двухподвижной вращательной кинематической пары, к которой присоединен конец звена одной соответствующей упомянутой опоры.
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОРУКИЙ РОБОТ-МАНИПУЛЯТОР | 2023 |
|
RU2804700C1 |
| ПЛАТФОРМЕННЫЙ РОБОТ | 2020 |
|
RU2751778C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ СКЛАДЫВАЮЩИЙСЯ МАНИПУЛЯТОР | 2021 |
|
RU2759552C1 |
| US 6729202 B2, 04.05.2004 | |||
| US 7367772 B2, 06.05.2008. | |||

