JO
20
Изобретение относится к машинотроению и может быть использовано роботах-манипуляторах.
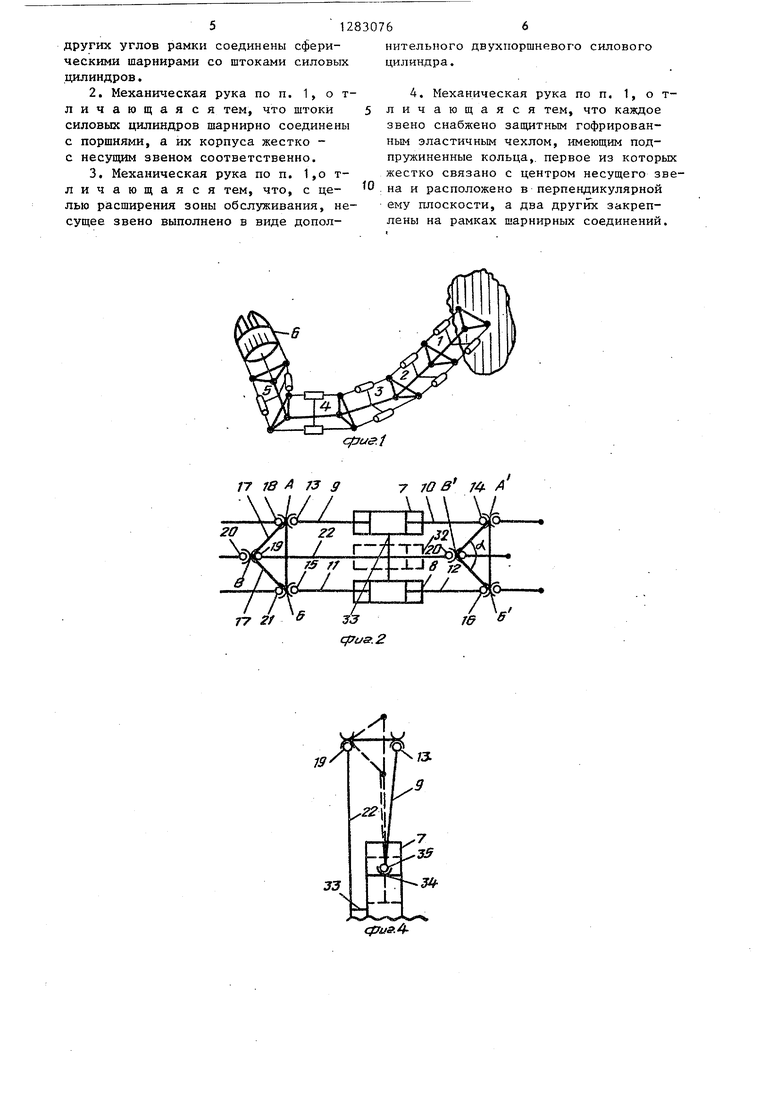
Цель изобретения - повышение наежности механической руки манипуля- 5 ора и расширение зоны обслуживания. На фиг. 1 изображена механическая ука манипулятора, общий вид на иг. 2 - одно несущее звено механиеской руки манипулятора на фиг.З - защитньй гофрированньй эластичный несущего звена, на фиг. 4 и 5 - варианты соединения корпусов сиовых цилиндров и их штоковJ на . фиг. 6 - механическая рука манипулятора в защитном гофрированном эластичном чехле.
Механическая рука манипулятора состоит из последовательно соединенных посредством шарнирных соединений несущих звеньев.1-5, при этом несущее звено 1 совмещено с основанием, а конечное несущее звено 5 - с захватным органом 6.25
Приводы 7 и 8 относительных перемещений несущих звеньев вьтолнены в виде двухпоршневых силовых цилиндров, установленных на каждом несущем звене с возможностью их относительного 20 перемещения в продольном и поперечном направлениях.
Силовые цилиндры 7 и 8 имеют соответственно разнонаправленные выдви гающиеся штоки 9, 10 и 11, 12, установлены в средних частях несущих звеньев и имеют сферические шарниры 13, 14 и 15, 16 соответственно. Последние соединяются с шарнирами соединения, включающего для каждого Q несущего звена две рамки, имеющие каждая форму прямоугольного равнобедренного треугольника, одна - с вершинами А, Б, В, а другая - с вершинами А , Б , в , причем стороны 17 каждой рамки равны, а угол с/, между ними равен 90. Пары сферических шарнирных соединений смежных несущих звеньев 13 и 18, 19 и 20, 15 и 21. жестко закреплены на рамке и противо-JQ положно направлены. В исходном положении ось механической руки манипулятора совпадает с несущим звеном 22, на концах которого также расположены сферические шарниры, посредством ко- „ торых несущие звенья соединены с вершинами прямых углов (В и в ) рамки.
Защитньй гофрированньй эластичньй чехол 23 каждого, несущего звена име35
O
0
5 .
25
20
Q JQ „
35
ет кольца 24,25 и 26, соединенные пружиной 27, связанной с гофрированным эластичным чехлом. Плоскости, условно проходящие через кольца 24 и 25, проходят и через шарниры соединения (рамки) несущего звена, кольца 24 и 25 жестко закреплены на рамках планками 28,29 и 30 а кольцо 26 жестко связано с центром несущего звена 22 посредством планок 31.
Для увеличения возможностей механической руки манипулятора за счет увеличения зоны обслуживания несущее звено 22 может быть выполнено в виде дополнительного двухпоршневого силового цилиндра 32. Силовые цилиндры 7 и 8 могут планкой 33 соединяться с центром несущего звена 22. В этом случае шток 9 соединяется с поршнем 34 двухпоршневого силового цилиндра 7 через шарнир 35. В случае жесткого соединения штока 9 с поршнем 34 (фиг.5) силовой двухпоршн§- вой цилиндр соединяется с центром несущего звена 22 посредством направляющей пары 36, обеспечивающей возможность поперечного перемещения силового цилиндра оси.
Механическая рука манипулятора работает следующим образом.
В исходном положении, когда механическая рука манипулятора вытянута горизонтально, все приводы 7 и 8 находятся в фиксированном положении. При различном изменении длин силовых цилиндров 7 и 8 путем различнаго вьздвижения штоков 9 и 10, 11 и 12, механическая рука манипулятора принимает различные пространственные конфигурации.
При изменении длин силовых цилиндров 7 и 8 несущего звена 1 на равную величину, но в противоположных направлениях несущие звенья 2,3,4 и 5 с захватным органом 6 перемещаются параллельно плоскости чертежа.
Аналогичным образом производится параллельное перемещение и в других .звеньях.
Наибольшая зона досягаемости механической руки манипулятора обеспечивается при вьщвинутом положении всех штоков силовых цилиндров.
Отклонение несущих звеньев в заданных положениях обеспечивается соответствующим соотношением перемещений штоков 9,10 и 11,12 всех силовых цилиндров.
31283076
взаимного угла нарамок, ргмеющих верБ , В несущего
ро ле ра но за вы не вн во
звена, .корпус силового цилиндра не должен перемещаться в продольном направлении относительно оси несущего звена. При смещении плоскости рамок А,Б,В и А , Б , в сферический шарнир 13 неизбежно имеет составляющую перемещения в поперечном направлении относительно оси несущего звена Поэтому в случае, когда шток 9 жестко и перпендикулярно связан с поршне 34, силовой цилиндр должен смещаться в указанном направлении. С этой целью конструкция содержит направляющую пару 36. При этом часть энергии силового цилиндра расходуется на преодоление возникающей негативной силы трения в направляющей паре 36 (эта сила имеет составляющую, параллельную несущему звену 22, а ее величина зависит от массы конструкции) Указанная сила трения исключается (и тем самым можно увеличить надежность конструкции), если силовой цилиндр 7 жестко закреплен в центре несущего звена 22 планкой 33, а шток 9 шарнирно укреплен на поршне 34. На фиг. 4 и 5 пунктиром обозначены поло жения штока 9 и силового цилиндра 7 при перемещении сферического шарнира 13 в плоскости чертежа.
Чтобы исключить возможные повреждения силовых цилиндров при перемещениях механической руки манипулятора, последний имеет защитный гофрированный эластичньй чехол, состоя- щий из колец 24, 25 и 26, соединенных между собой пружиной 27. Кольца 24 и 25 калсдого несущего звена жестко укреплены на рамках, имеющих вершины А,Б,ВиА , Б и в , планками 28, 29 и 30, а кольцо 26, расположенное в центре звена, жестко связано с центром несущего звена 22. При смещении плоскостей рамок, меняется пространственное расположение колец 24 и 25 друг относительно друга. Пло скость, проходящая через кольцо 26, всегда проходит через центры силовых цилиндров несущего звена, поэтому последние остаются предохраненными кольцом 26, пружиной 27 (натянутой или сжатой в противоположных местах) и укрепленным на ней гофрированным зластичн.ь1м чехлом.
O
5
плоскостей,
0
5
5
Для увеличения области манипулирования (т.е. для того, чтобы обес- лечить поступательное перемещение рамок каждого звена друг относительно друга) несущее звено 22 также заменяется дополнительным двухштоко- вым силовым цилиндром 32. В последнем случае кольцо 26 укрепляется с внешней стороны в центре двухштоко- вого силового цилиндра 32.
Сферические шарниры одного несу- щего звена образуют пару равнобедренных прямоугольных треугольников,, что позволяет производить простоит расчет уставок на силовые цилиндры с целью нужной пространственной ориентации механической руки манипулятора. Действительно, плоскость, проходящая через несущее звено 22 и шток 9, а также плоскость, проходящая через несущее звено 22 и шток 11, взаимно перпендикулярны. Поэтому расчет смещения последующего несущего звена по отношению к предыдущему .сводится к расчету положения сферических шарниров 13 и 14 в одной плоскости и расчету положения сферических шарниров 15 в другой плоскости. Конструкция позволяет изменять угол наклона
проходящих через рамки несущего звена, от О до 180, а ее многозвенность позволяет собирать механическую руку манипулятора с любым числом степеней подвижности в зависимости от условий работы.
Формула изобретения
1. Механическая рука манипулятора,
содержащая последовательно соединенные посредством шарнирных соединений несущие звенья, приводы относительных перемещений несущих звеньев, выполненные в виде двухпоршневык силовых
цилиндров, расположенных по два на каждом несущем звене с возможностью их относительного перемещения в про- дольном и поперечном направлениях, причем штоки силовых цилиндров соответствующими шарнирами соединены со смежными звеньями, отличающаяся тем, что, с целью повышения надежности механической руки, шарнирные соединения смежных несущих звеньев
включают рамки, имеющие форму прямоугольного равнобедренного треугольника, при этом несущие звенья сферическими шарнирами соединены с вершинами прямых углов рамки, а вершины
других углов рамки соединены сферическими шарнирами со штоками силовык цилиндров.
2.Механическая рука по п. 1, отличающаяся тем, что штоки силовых цилиндров шарнирно соединены с поршнями, а их корпуса жестко с несущим звеном соответственно.
3.Механическая рука по п. 1,о т- личающаяся тем, что, с целью расширения зоны обслуживания, несущее звено выполнено в виде допол
нителыюго двухпоршневого силового цилиндра.
4. Механическая рука по п. 1, о т- личающаяся тем, что каждое звено снабжено защитным гофрированным эластичньм чехлом, имеющим подпружиненные кольца,, первое из которых жестко связано с центром несущего зве- . на и расположено в перпендикулярной ему плоскости, а два других закреплены на рамках шарнирных соединений.

| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| Механическая рука | 1978 |
|
SU738863A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2032527C1 |
| Манипулятор | 1987 |
|
SU1537516A1 |
| Манипулятор | 1986 |
|
SU1565674A1 |
| Манипулятор | 1985 |
|
SU1289672A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Манипулятор | 1983 |
|
SU1186464A1 |
| Манипулятор | 1990 |
|
SU1754435A1 |
| Антропоморфный манипулятор | 1989 |
|
SU1646850A1 |

Изобретение относится к машиностроению и может быть исиользовано в роботах-манипуляторах. Целью изобретения является повышение надежности и расширение зоны обслуживания. Механическая рука манипулятора содержит последовательно соединенные посредством шарнирных соединений, имеющих рамки в форме прямоугольных рав нобедренных треугольников с вершинаiMH А,Б,В и А , Б , В , несущие звенья. Приводы относительных перемещений каждого несущего звена выполнены в виде двухпоршневых силовых цилиндров 7 и 8. Каждое звено имеет защитный гофрированный :эластичный чехол, включающий подпружиненные кольца, кольцо 26 жестко связано с центром несущего звена и расположено в перпендикулярной ему плоскости, а кольца 24 и 25 закреплены на рамках шарнирных соединений. 3 з.п. . ф-лы. 6 ил. I ел to 00 00 о i а ff cfn/ff
.l
17 18 А 73 д
//
Z2
/ Г
rs //
rcbi
гУ. «
cpejs.2
±
(frifff.4-fZ
Редактор И. Рыбченко
Составитель Н. Бакулина
Техред А.Кравчук Корректор М. Самборская
Заказ 7343/13 Тираж 949 .Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
CfJtJff.6
| Механическая рука | 1978 |
|
SU738863A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
