Техническое решение относится к робототехнике, а именно к робототехническим комплексам, предназначенным для дистанционной эвакуации раненых с поля боя, труднодоступных мест и сооружений окопного типа.
Эвакуация раненых в ходе боя - это серьезнейшее и опасное мероприятие. Раненых нужно выносить, оказывать первую помощь, а тяжелораненых стабилизировать и вывозить в тыл для полноценной и профессиональной медицинской помощи. Все эти мероприятия отвлекают значительные силы, до двух человек личного состава на каждого раненого. Мало того, что эти силы какое-то время не принимают участие в наступлении или обороне, которые ведет подразделение, так они еще и вынужденно формируют привлекательную для противника, легкую мишень. Таким образом, разработка технических решений позволяющих сделать проблему эвакуации раненых в ходе боя менее опасным для личного состава является важной научно-технической задачей.
Известен мобильный робототехнический комплекс по патенту № 2574547 (опубликовано 10.02.2016), содержащий мобильный робот, пост дистанционного управления, комплект дополнительного оборудования, содержащий транспортную прицепную тележку, автомобильный эвакуатор, комплект губок схвата различной конфигурации, кронштейны-держатели разрушителей взрывоопасных предметов, причем мобильный робот представляет собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом дистанционного управления, бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на звеньях многостепенного манипулятора и на корпусе транспортного средства, причем каждый видеоблок содержит видеокамеру, заключенную в защитный кожух с источниками подсветки, и по меньшей мере один из видеоблоков, выполняющий обзорные функции, расположен на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, при этом на транспортном средстве укреплены манипулятор с захватным устройством и его приводы, система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами индикации, дополнительно снабжен системой видеонаблюдения с беспроводным устройством передачи сигнала оператору, смонтированной на беспилотном летательном аппарате винтового типа, связанной с постом дистанционного наблюдения.
Недостатком известного мобильного робототехнического комплекса является его большие габариты, обусловленные наличием таких выступающих частей как видеоблоки, расположенные на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, при этом манипулятор, которым оснащен мобильный робототехнический комплекс имеет приводы, реализация которых в значительной степени усложняет конструкцию и негативно влияет на его надежность.
Известна установка сенсорного модуля на беспилотный наземный аппарат по патенту US 2021101278 от 04.08.2021, содержащая основной корпус, систему привода, поддерживаемую основным корпусом, причем система привода содержит правый и левый узлы ведомых гусениц, установленные на правой и левой сторонах основного корпуса, рычаг манипулятора, шарнирно соединенный с основным корпусом, при этом рычаг манипулятора содержит первое звено, соединенное с основным корпусом, поворотный элемент, соединенный с первым звеном, и второе звено, соединенное с поворотным элементом, при этом поворотный элемент выполнен с возможностью вращаться независимо от первого и второго звеньев; и сенсорный модуль, установленный на вращающемся элементе, причем сенсорный модуль содержит один или несколько датчиков, по меньшей мере частично расположенных ниже, по меньшей мере, части второго звена, когда второе звено вытянуто вверх.
Исходя из описания конструкции и работы известного технического решения, очевидно, что его работу обеспечивают значительное количество датчиков, сенсоров и программного обеспечения. Таким образом, недостатком известного устройства является сложность конструкции и низкая надежность электронных систем расположенных на незащищенных местах установки сенсорного модуля на беспилотном наземном аппарате.
Наиболее близким аналогом к заявленному предложению, является мобильный модульный робототехнический комплекс по патенту №2771402 (опубликовано 04.05.2022, бюл. № 13), содержащий самоходную базовую платформу с независимыми движителями, многостепенной манипулятор, две видеокамеры с подсветкой, систему активации внешних исполнительных устройств и пульт дистанционного управления, снабжен источниками питания, выполненными в виде Li-Ion аккумуляторов, базовая платформа выполнена из влагостойкой фанеры, независимые движители снабжены электроприводом и выполнены в виде гусеничных движителей или колесных модулей, причем движители имеют возможность отсоединения для раздельной транспортировки, масса комплекса составляет 16 кг, а манипулятор выполнен с возможностью прикрепления к платформе одним болтом и соединения с ней посредством разъема передачи команд.
Как и в ранее приведенных технических решениях в мобильном модульном робототехническом комплексе недостатком является сложность конструкции, обусловленная применением многостепенного манипулятора, при этом размещение датчиков и устройств наблюдения на манипуляторе негативно влияют на надежность устройства в целом.
Как показывает практика позиции, опорные пункты и районы обороны, как правило, оборудуются траншеями, одиночными, парными, групповыми окопами и другими инженерными сооружениями. Раненый военнослужащий не всегда способен самостоятельно покинуть укрытие.
Таким образом, конструкция робототехнического комплекса должна обеспечивать возможность выполнения эвакуационных работ значительно ниже уровня земли.
Техническим результатом является упрощение конструкции и повышение надежности робототехнического комплекса при выполнении задач, связанных с эвакуацией раненных.
Технический результат достигается за счет того, что на верхней части самоходной платформы сварным соединением установлены проушины, в которых шарнирно закреплена заведена рама, выполненная в форме равнобедренного треугольника вершина которого оснащена упором, к равным сторонам рамы приварены кронштейны с роликами, через которые заводят трос с устройством зацепа, наматываемый на лебедку, при этом по обе стороны от лебедки приварены наклонные упоры с резиновыми демпферами.
Сущность предлагаемого технического решения поясняется рисунками, на которых изображены:
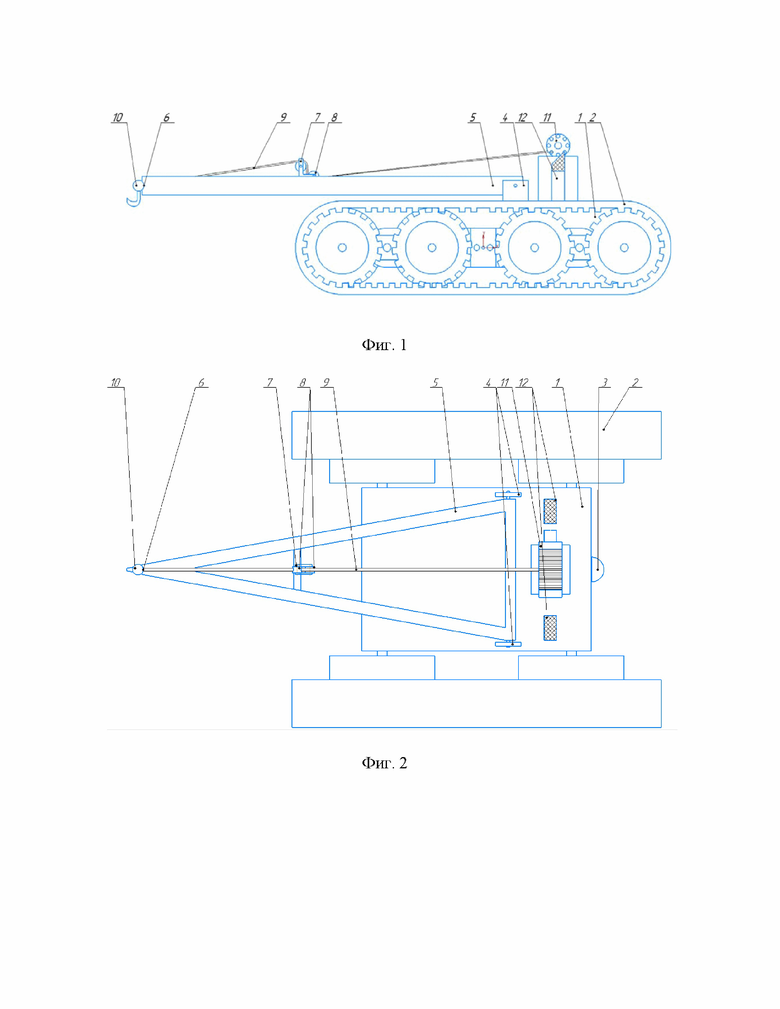
фиг. 1 - Устройство дистанционной эвакуации на базе робототехнического комплекса в транспортном положении (вид сбоку);
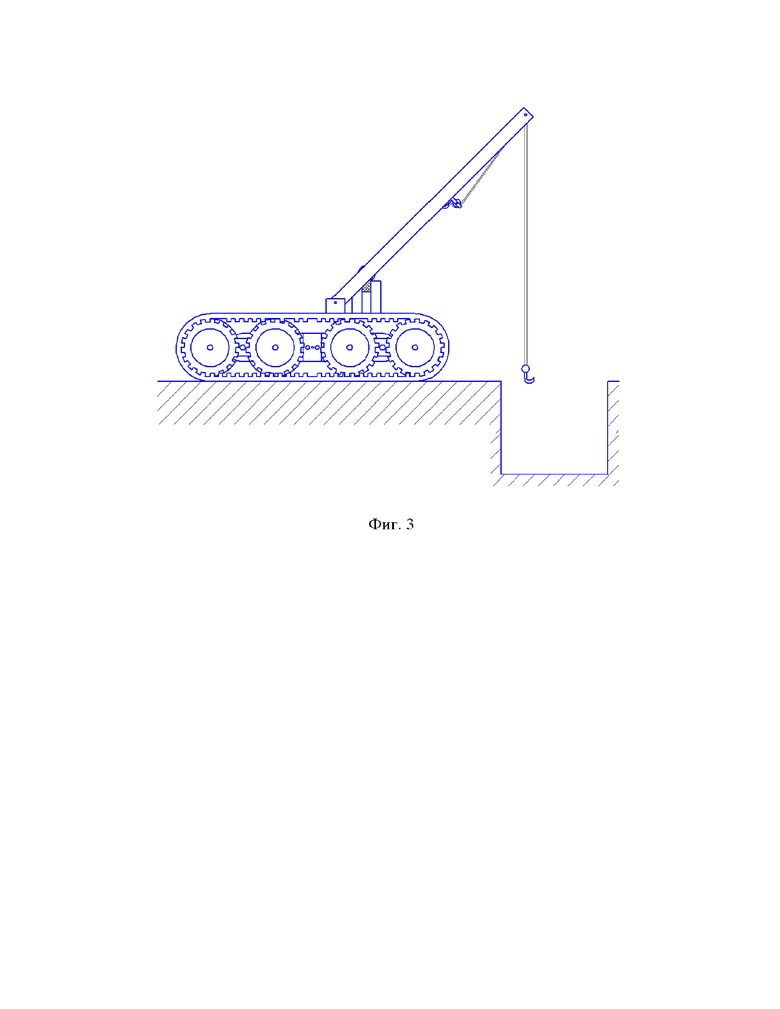
фиг. 2 - Устройство дистанционной эвакуации на базе робототехнического комплекса в транспортном положении (вид сверху);
фиг. 3 - Устройство дистанционной эвакуации на базе робототехнического комплекса при эвакуации раненных из инженерных сооружений.
Устройство дистанционной эвакуации на базе робототехнического комплекса содержит самоходную платформу 1 с гусеничным движителем 2, видеокамеру 3, источник питания и пульт дистанционного управления (на рисунке не показаны), на верхней части самоходной платформы 1 сварным соединением установлены проушины 4 в которых шарнирно закреплена рама 5, выполненная в форме равнобедренного треугольника вершина которого оснащена упором 6, к равным сторонам рамы приварены кронштейны 7 с роликами 8, через которые заводят трос 9 с устройством зацепа 10, наматываемый на лебедку 11, при этом по обе стороны от лебедки приварены наклонные упоры 12 с резиновыми демпферами.
Устройство дистанционной эвакуации на базе робототехнического комплекса работает следующим образом.
В транспортном положении рама находится в сложенном состоянии и располагается параллельно корпусу самоходной базовой платформы (см. фиг. 1, 2).
Движение платформы начинается с одновременным включением вращения двух движителей в одном направлении. При необходимости плавного поворота влево или вправо отключается движение левого или правого движителя соответственно. Для осуществления моментального разворота на месте вращение движителей включается одновременно в разные стороны. Осмотр подозрительного предмета осуществляется с помощью обзорной видеокамеры, расположенной на базовой самоходной платформе. При обнаружении раненного, подлежащего эвакуации, оператор, используя пульт дистанционного управления, поднимает раму 5 путем наматывания троса 9 на лебедку 11. При заборе троса 9 устройство зацепа 10 входит в упор 6, представляющий из себя выточенный паз в вершине треугольной рамы 5, дальнейший забор троса 9 поднимает раму 5 относительно самоходной платформы 1, проворачивая в проушинах 4 до того момента, пока рама 5 не коснется наклонных упоров 12 с резиновыми демпферами. В таком положении (см. фиг. 3) устройство дистанционной эвакуации на базе робототехнического комплекса готово к выполнению задачи.
Как правило, зацеп производится за быстросъемный металлический карабин размещенный у военнослужащего на бронежилете или на разгрузочном жилете. Также зацеп возможен за эвакуационную стропу.
После извлечения из сооружений окопного типа и в зависимости от рельефа местности и тяжести ранений, эвакуация может осуществляться либо волоком, либо после частичного подъема раненного над поверхностью земли.
| название | год | авторы | номер документа |
|---|---|---|---|
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| ЭВАКУАЦИОННЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2023 |
|
RU2824684C1 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| Боевой модуль робототехнического комплекса с универсальным ложементом | 2024 |
|
RU2838709C1 |
| СПОСОБ ПОСТАНОВКИ МИННЫХ ЗАГРАЖДЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2833085C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Способ и устройство для постановки минных заграждений | 2023 |
|
RU2834487C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2574547C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2709074C1 |
| СПОСОБ РЕШЕНИЯ ОГНЕВОЙ ЗАДАЧИ ДИСТАНЦИОННО УПРАВЛЯЕМЫМ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ ВОЕННОГО НАЗНАЧЕНИЯ В АВТОНОМНОМ РЕЖИМЕ | 2024 |
|
RU2840168C1 |
Изобретение относится к робототехнике, а именно к робототехническим комплексам, предназначенным для дистанционной эвакуации раненых с поля боя, труднодоступных мест и сооружений окопного типа. Устройство дистанционной эвакуации на базе робототехнического комплекса содержит самоходную базовую платформу с гусеничным движителем, видеокамеру с подсветкой, источник питания и пульт дистанционного управления. На верхней части самоходной платформы сварным соединением установлены проушины, в которых шарнирно закреплена рама, выполненная в форме равнобедренного треугольника, в вершине которого вварено устройство фиксации с упором. К равным сторонам рамы приварены кронштейны с роликами, через которые заводят трос с устройством зацепа, наматываемый на лебедку. По обе стороны от лебедки приварены наклонные упоры с резиновыми демпферами. Техническим результатом является упрощение конструкции и повышение надежности робототехнического комплекса при выполнении задач, связанных с эвакуацией раненых. 3 ил.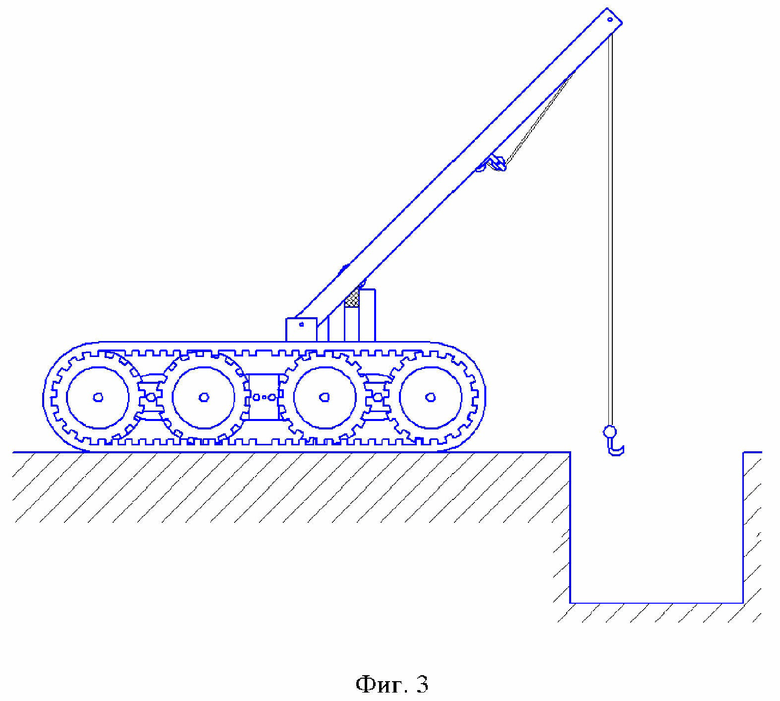
Устройство дистанционной эвакуации на базе робототехнического комплекса, содержащее самоходную базовую платформу с гусеничным движителем, видеокамеру с подсветкой, источник питания и пульт дистанционного управления, отличающееся тем, что на верхней части самоходной платформы сварным соединением установлены проушины, в которых шарнирно закреплена рама, выполненная в форме равнобедренного треугольника, в вершине которого вварено устройство фиксации с упором, к равным сторонам рамы приварены кронштейны с роликами, через которые заводят трос с устройством зацепа, наматываемый на лебедку, при этом по обе стороны от лебедки приварены наклонные упоры с резиновыми демпферами.
| МОБИЛЬНЫЙ МОДУЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2021 |
|
RU2771402C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
| CN 111297575 A, 19.06.2020 | |||
| CN 107428008 A, 01.12.2017 | |||
| ПРИБОР ДЛЯ ЗАЧИСТКИ КОНЦОВ КОТЕЛЬНЫХ ТРУБ | 1933 |
|
SU36855A1 |

