17
ел
4
о ьо
О5
ел
Риг.1
Изобретение относится к измерительной технике и может быть использовано при определении координат точек различных изделий и конструкций.
Целью изобретения является повышение производительности определения координат за счет увеличения зоны измерения.
На фиг. 1 приведено устройство для определения координат; на фиг. 2 - втулка с цилиндрической линзой и излучателем.
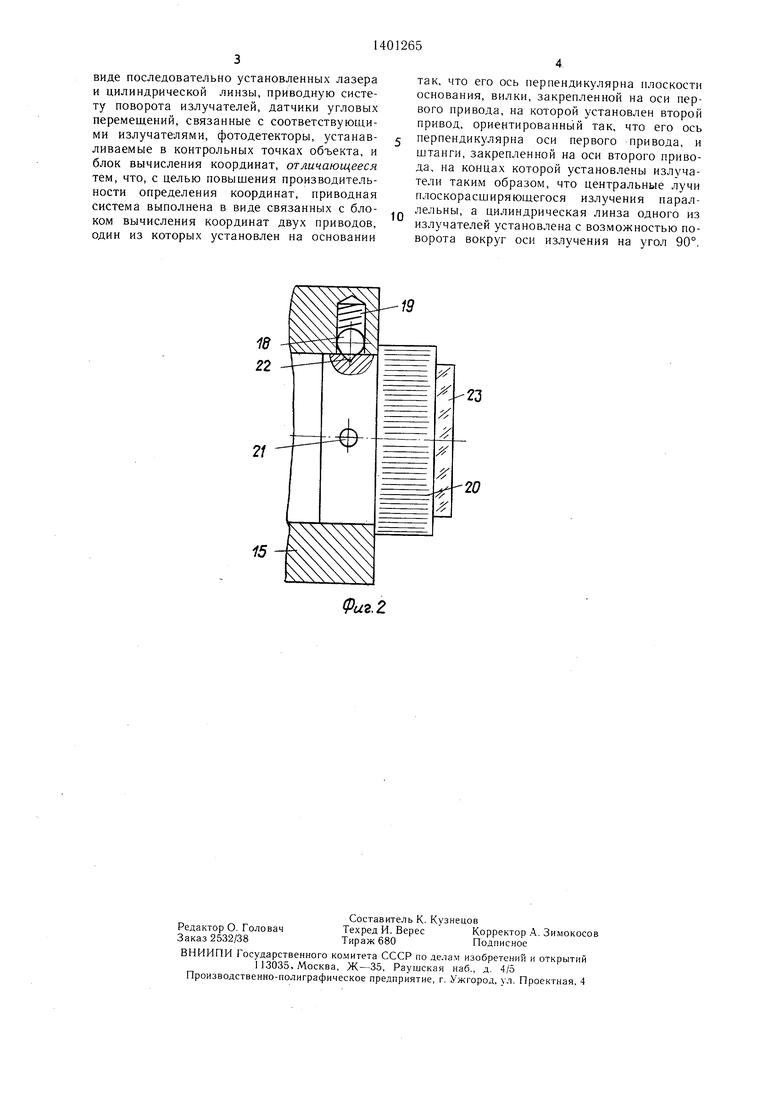
Устройство (фиг. 1) состоит из основания 1, несущего привода 2 и стойки 3, на которой закреплена считывающая оптическая головка 4 датчика угловых перемещений. На оси 5 привода 2 закреплена вилка 6 с приводом 7. На оси 8 привода 7 и на оси 5 привода 2 установлены оптическая головка 9 датчика угловых перемещений, кодированные диски 10 и 11 с осветителями 12. На оси 8 также закреплена штанга 13, на которой размещены лазерные излучатели 14 и 15, у которых выходящие центральные лучи плоскорасщиряющегося излучения параллельны и расположены в одной вертикальной плоскости. На измеряемом объекте в контрольных точках расположены фотодетекторы 16, связанные с блоком 17 вычисления координат и управления, причем каждый по своему определенному каналу. Блок 17 вычисления координат и управления также связан с датчиками угловых перемещений и служит для накопления и обработки данных об угловых перемещениях с последующим расчетом на ЭВМ координат контрольных точек и вывода полученной информации на дисплей и цифропечатающее устройство для управления приводами 2 и 7. В корпусе излучателя 15 (фиг. 2) установлены щарик 18 с пружиной 19 и втулка 20, в которой выполнены углубления 21 и 22, отстоящие друг от друга на расстоянии, равном 1/4 длины окр.ужности, которую образует цилиндрическая часть втулки 20, расположенная в корпусе 15, т. е. углубление 21 расположено относительно углубления 22 под углом 90° по окружности втулки 20.
Устройство работает следующим обра- 1зом.
i Устройство устанавливают на некотором |расстоянии от измеряемого объекта на ос- |новании 1, при этом цилиндрическая линза 23 (фиг. 2) излучателя 15 вместе с втул- кой 20 поворачивается в корпусе излучателя 15 до попадания шарика 18 в углубление i21, фиксируется вместе с втулкой 20 пружиной 19 так, что плоскость Р излучения лазерных лучей с излучателя 15 (фиг. I) пер- пендикулярна плоскости предстоящего ска- |нирования. Затем с помощью блока 17 вы- числения координат и управления включается в работу привод 2 (фиг. 1), при этом кодированный диск 10 датчика угловых перемещений вращается вокруг оси I-I, в ре0
5
0
5
0
5
0
5
0
5
зультате чего свет осветителя 12, проходящий через кодированный вращающийся диск 10, модулируется и попадает на оптическую головку 4, с которой выходят кодированные электрические сигналы, поступающие в блок 17 вычисления. Одновременно с диском 10 вращается вилка 6 с находящейся на оси 5 щтангой 13 и излучателями 14 и 15, закрепленными на ней. Для сканирования с помощью привода 2 используют только излучение излучателя 15, попадание которого на тот или иной фотодетектор 16 генерирует в них управляющие электрические сигналы, которые каждый по своему каналу поступают в тот же блок 17 вычисления, где с их помощью фиксируются и заполняются серии импульсов, получаемых при прохождении плоскости излучения Р через фотодетекторы 16 и соответствующих величинам углов, образованных центральными лучами в исходном и попавщем на фотодетекторы 16 излучения Р положениях. Затем (фиг. 2) втулка 20 в.месте с цилиндрической линзой 23 поворачивается на 90° от своего первоначального положения, при этом шарик 18 попадает в углубление 22. В этой позиции плоскость излучения Р (фиг. 1) занимает положение Р , при котором плоскость f перпендикулярна плоскости Р и плоскости предстоящего вертикального сканирования, также параллельна и неподвижна по отношению к плоскости излучения S. После этого включается привод 7, на оси 8 которого закреплена щтанга 13 с излучателями 14 и 15, и производится совместное сканирование неподвижных друг относительно друга излучений Р и S от исходного горизонтального положения вокруг оси Н-II и поочередное пересечение ими фотодетекторов 16. При этом процесс формирования серий импульсов в управляющем блоке 17 вычисления координат аналогичен процессу при сканировании с помощью излучения Р. На фиг. 1 показано пересечение одного и того же фотодетектора 16 сначала плоскостью излучения Р, а затем плоскостью излучения S, (плоскость S изображена щтрих- пунктирными линиями вместе с излучателем 14 в положении S , в которое она попадает после пересечения фотодетектора 16 плоскостью Р ). В результате взаимно перпендикулярных сканирований производится накопление данных в запоминающем устройстве блока 17 вычисления координат и управления с последующим расчетом координат точек и выводом информации на дисплей и цифропечатающее устройство.
Формула изобретения
Устройство для определения координат точек объекта, содержащее основание, два излучателя, каждый из которых выполнен в
виде последовательно установленных лазера и цилиндрической линзы, приводную систе- ту поворота излучателей, датчики угловых перемещений, связанные с соответствующими излучателями, фотодетекторы, устанавливаемые в контрольных точках объекта, и блок вычисления координат, отличающееся тем, что, с целью повышения производительности определения координат, приводная система выполнена в виде связанных с блоком вычисления координат двух приводов, один из которых установлен на основании
так, что его ось перпендикулярна плоскости основания, вилки, закрепленной на оси первого привода, на которой установлен второй привод, ориентированный так, что его ось перпендикулярна оси первого привода, и штанги, закрепленной на оси второго привода, на концах которой установлены излучатели таким образом, что центральные лучи плоскорасширяющегося излучения параллельны, а цилиндрическая линза одного из излучателей установлена с возможностью поворота вокруг оси излучения на угол 90°.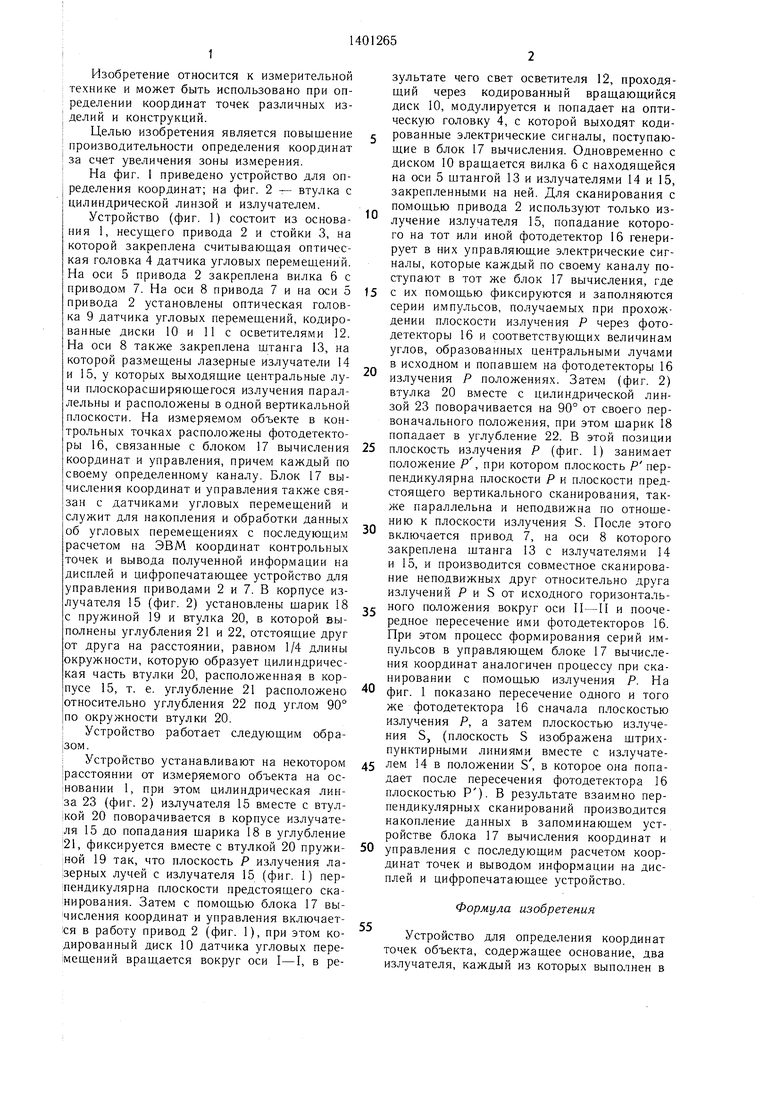
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| МНОГОКАНАЛЬНЫЙ КОНФОКАЛЬНЫЙ СПЕКТРОАНАЛИЗАТОР ИЗОБРАЖЕНИЙ | 2019 |
|
RU2723890C1 |
| СПОСОБЫ, ИЗДЕЛИЯ И УСТРОЙСТВА ДЛЯ ПРОВЕРКИ ПОДЛИННОСТИ | 2005 |
|
RU2385492C2 |
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2006 |
|
RU2326324C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| МНОГОКАНАЛЬНЫЙ КОНФОКАЛЬНЫЙ МИКРОСКОП (ВАРИАНТЫ) | 2014 |
|
RU2574863C1 |
| Устройство для измерения профиля структурной характеристики показателя преломления атмосферы | 1983 |
|
SU1103120A1 |
| Ультразвуковой прибор неразрушающего контроля гибридного типа | 2022 |
|
RU2824537C2 |
| УСТРОЙСТВО И СПОСОБ ОТСЛЕЖИВАНИЯ ПОЛОЖЕНИЯ ГЛАЗА | 2019 |
|
RU2724445C1 |
Изобретение относится к измерительной технике и может быть использовано при определении координат точек объекта. Целью изобретения является повышение производительности определения координат за счет увеличения зоны измерения. На основании 1 устанавливают привод 2, на оси 5 которого закреплена вилка 6 с приводом 7. На оси 8 привода 7 закреплена 1птанга 13 с излучателями 14 и 15, плоскорасширяющиеся излучения которы.х распространяются в одной плоскости. Цилиндрическая линза в корпусе изупучателя 15 поворачивается вокруг центральной осп излучения на угол, равный 90°. Одновременно с диском 10 вращается вилка 6 со щтангой 13 и излучате,тя- ми 14, 15. С помощью привода 2 сканируют излучателем 15, приводом 7 производится совместное сканирование излучателями 14, 15 во взаимно псрпендикулярны.х направлениях, в результате чего в запоминающем устройстве производится накопление данпьгх с последующим расчетом координат точек. 2 ил. о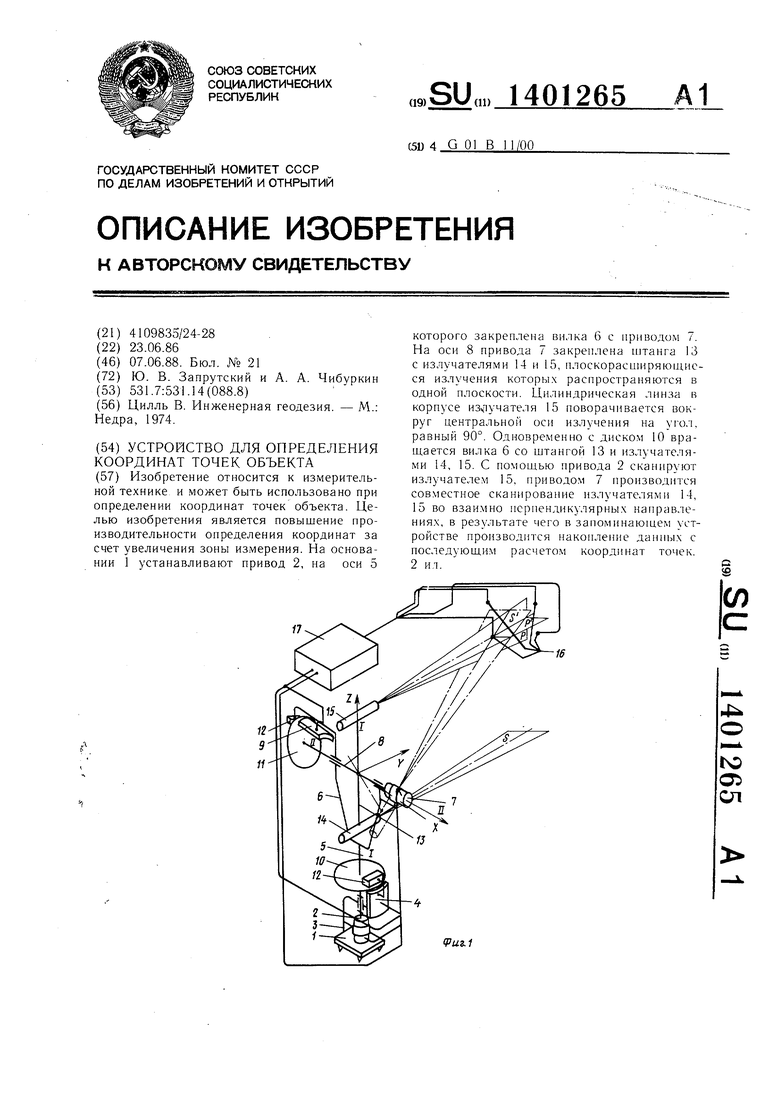
Фиг.2
19
| Цилль В | |||
| Инженерная геодезия | |||
| М.: Недра, 1974. |
