Автоматическое определение горизонтальной проеквди пройденного пути и разности высот точек земной поверхности, имеется в виду осуществить применением в предлагаемом приборе медного маятника, подвешенного на повозке и перемещающего, при уклонах пути, раму, несущую фрикционный ролик, сцепленный с фрикционным диском, получающим вращение от колеса повозки, для передачи вращения пропорционально-вертикальной проекции перемещения типовому барабану, а также применением фрикционного ролика, сцепленного с барабаном, имеющим вырезы для передачи получаемого им от колеса повозки пропорционально - горизонтальной проекции перемещения, вращения второму типовому барабану, при чем получения оттисков цифр счетчика полученных данных на бумажной ленте, достигается прижатием к последней типовых барабанов.
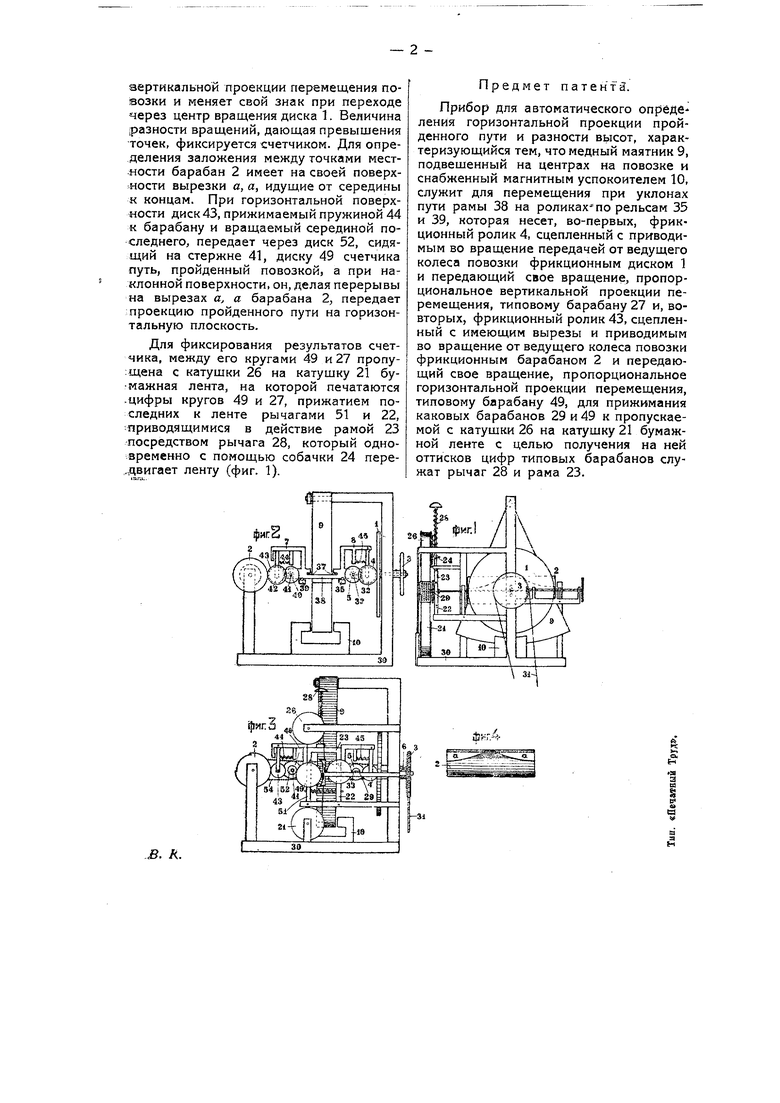
На чертеже фиг. 1 изображает вид прибора сбоку; фиг. 2-то же, вид спереди без счетчика; фиг. 3-то же, в собранном виде; фиг. 4 - боковой вид барабана с вырезом.
На раме 30 повозки (фиг. 2 и 3) укреплен качающийся маятник 9, который снабжен внизу магнитным успокоителем 10, действующим по принципу „Фуко. Шипами 37 маятника, сидящими: в вырезах рамы 38 (фиг. 2), последняя, при следовании тележки по уклонам, перемещается на роликах по рельсам 35 и 39. Вместе с рамой перемещаются укрепленные на ней кронштейн 7 с шестернями 42, 40 и фрикционным диском 43, и кронштейн 8 с шестернями 5, 32 и фрикционным диском 4, из которых шестерни 40 и 5, при перемещении рамы, скользят по стержням 41 и 33 квадратного сечения, фрикционный диск 43 по барабану 2, имеющему выемки а, а, а диск 4 по фрикционному диску 1, связанному с колесом 3, которое получает свое вращение от колеса повозки посредством цепи 31 (фиг. 3). Барабан 2 также получает свое вращение от колеса 3 посредством цепи 54 и зубчатки б (фиг. 3). При работе прибора диск 4, прижатый пружиной 45 к диску 1, получает от последнего вращение, которое через диск 29, сидящий на стержне 33, передается трением диску 27, связанному со счетчиком, при чем диск 4, вращаясь, в то же время при качании маятника, перемещается по диску 1 вдоль своей . Так как от угла наклона маятника зависит перемещение диска 4, то вращение последнего пропорционально
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для записи пройденного пути | 1927 |
|
SU15310A1 |
| Прибор для вычисления прямоугольных координат и тригонометрических функции | 1930 |
|
SU34158A1 |
| Устройство для автоматической записи профиля проходимого пути | 1935 |
|
SU53583A1 |
| ПРИБОР ДЛЯ МЕХАНИЧЕСКОЙ ЗАПИСИ ПРОДОЛЬНОГО ПРОФИЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1965 |
|
SU171121A1 |
| Прибор для проверки кривых железнодорожного пути | 1962 |
|
SU150538A1 |
| АВТОМАТИЧЕСКИЙ ПРИБОР ДЛЯ НИВЕЛЛИРОВАНИЯ | 1925 |
|
SU4638A1 |
| Устройство для записи профиля проходимого повозкой пути | 1934 |
|
SU49284A1 |
| Автоматический прибор для съемки плана и профиля пройденного пути | 1933 |
|
SU42702A1 |
| АВТОМАТИЧЕСКИЙ НИВЕЛИР | 1933 |
|
SU38787A1 |
| АВТОМАТИЧЕСКИЙ НИВЕЛЛИРОВОЧНЫЙ ПРИБОР | 1923 |
|
SU3962A1 |

