Изобретение относится к выемочно- погрузочной технике, предназначенной для открытой разработки месторождений полезных ископаемых.
Целью изобретения является расширение технологических возможностей при разработке пород с различными физико-механическими свойствами.
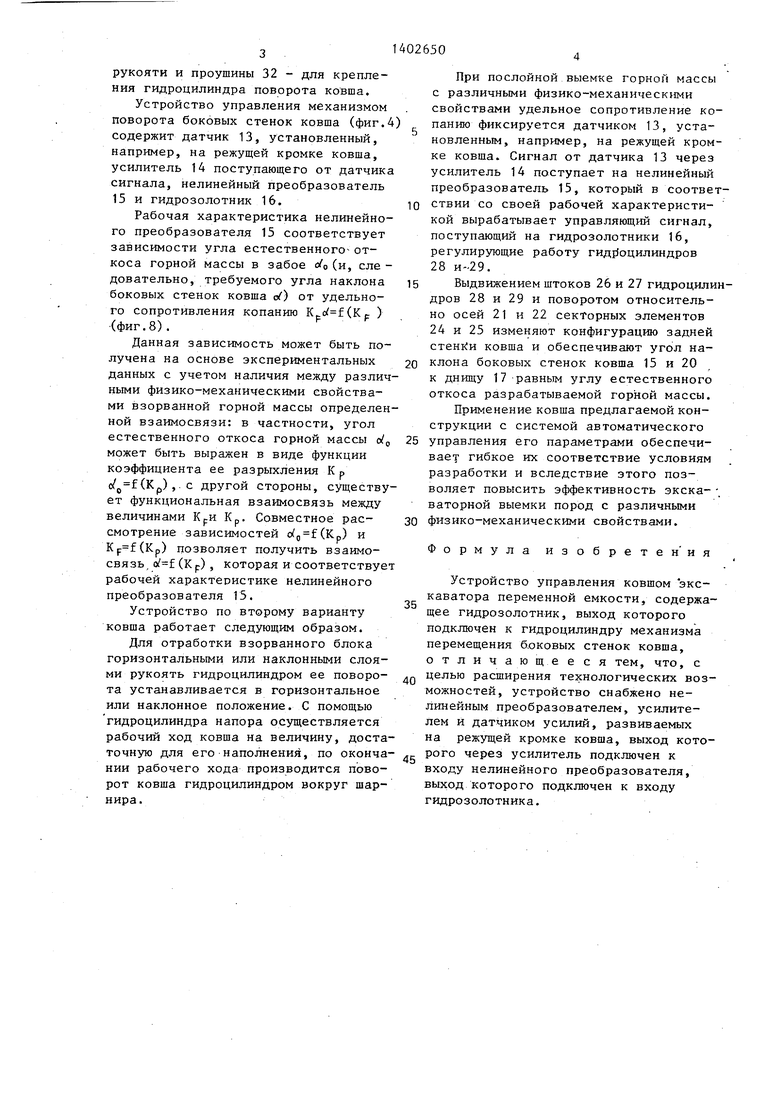
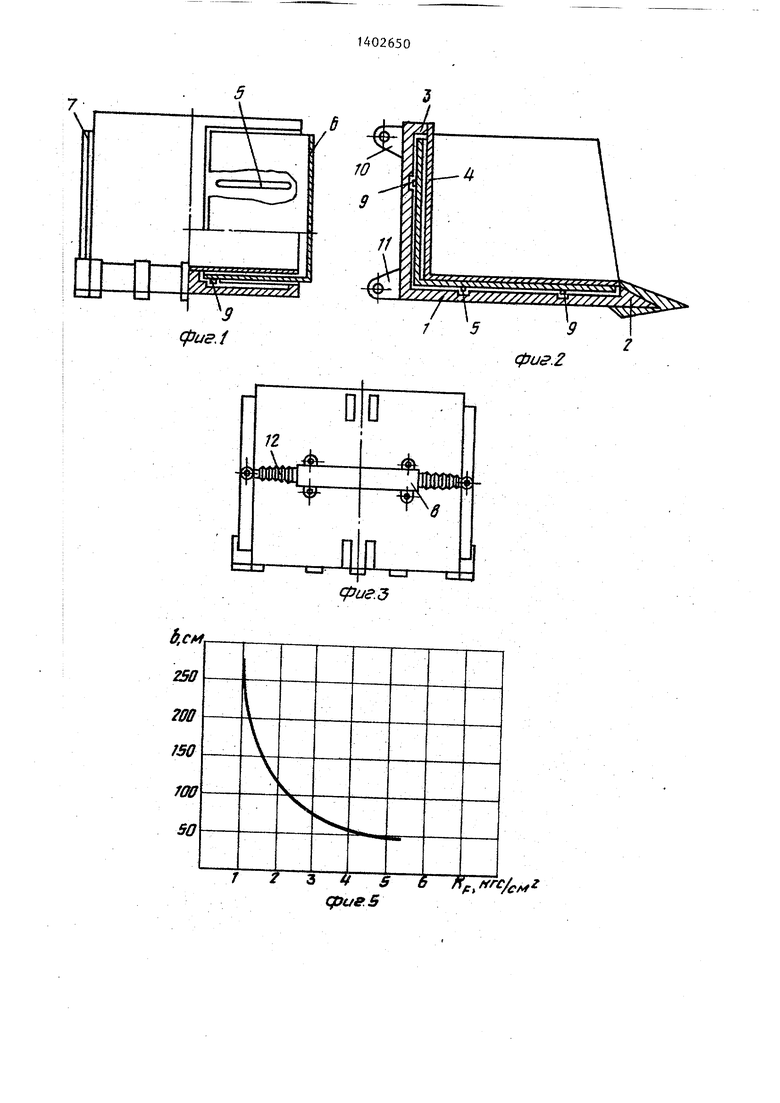
На фиг.1 - 3 изображен ковш экс- каватора в трех проекциях, первый вариант; на фиг.4 - блок-схема управления механизмом раздвижения боковых стенок ковша; на фиг.5 - зависимость, соответствующая рабочей харак:теристике нелинейного преобразоватег йя системы; на фиг. 6 и 7 - ковш экс- 1каватора в двух проекциях,второй ва- |риант; на фиг.8 - зависимость, соответствующая рабочей характеристике нелинейного преобразователя системы для второго варианта ковша.
Ковш экскаватора по первому ва- зианту содержит днище 1 с режущей рромкой 2, заднюю стенку 3, Г-образ- йую пластину 4, направляющие 5, под- )8ижные боковые стенки 6 и 7, которые йогут перемещаться относительно на- рравлякнцих под действием закреплен- iioro на задней стенке ковша 3 гидро- цилиндра 8. На боковых стенках ковша |)асположены элементы 9, которые входят в направляющие. На задней стенке ковша имеются проушины 10 и 11, служащие для крепления ковша к рукояти И присоединения гидроцилиндра поворо ковша. Штоки гидроцилиндра 8 закр кожухами 12.
I Устройство управления механизмом Перемещения боковых стенок 6 и 7 KOB nia - гидроцилиндром 8 включает датчи 13, установленный, например, на режу ш}ей кромке ковша 2, усилитель 14 по- С1тупакяп;его от датчика сигнала, нелинейный преобразователь 15 и гидро- золотник 16.
Рабочая характеристика нелинейного преобразователя 15 соответствует зависимости ширины ковша Ь (приблизительно равной ширине копания) от удельного сопротивления копанию Кр b (Кр).При черпании по прямолинейной горизонтальной траектории, постоянном (близком к оптимальному) уеилии копания Рк и, соответственно, пфстоянной касательной составляющей сопротивления копанию Рр, , а также постоянном значении толщины срезаемой стружки h зависимость (K р)
0
5
имеет обратно пропорциональный характер. Данная зависимость соответст- i вует рабочей характеристике нелинейного преобразователя 15 (численные значения величин на фиг.5 соответствуют P,I 25 тс, ).
Устройство управления ковшом экскаватора переменной емкости работает следующим образом.
При выемке горной массы с различными физико-механическими свойствами удельное сопротивление копанию фиксируется датчиком 13 усилий установленным, например, на режущей кромке 2 ковша. Сигнал от датчика 13 через усилитель 14 поступает на нелинейный преобразователь 15, который в соответствии со -своей рабочей характеристикой вырабатывает управляющий сигнал, поступающий на гидрозолотник 16, регулирующий работу гидроцилиндра 8. Перемещением штоков гидроцилиндра 8 и связанных с ними боковых стенок ковша 6 и 7 относительно направляющих 5 изменяют параметры ковша и обеспечивают их соответствие удельному сопротивлению копанию и физико - механическим свойствам разрабатывае- мой горной массы в целом.
Область применения изобретения составляют карьеры, ведущие открытую разработку месторождений полезных ископаемых.
Ковш экскаватора по второму.ва- - рианту (фиг. 6 и 7) содержит днище 17 с.режущей кромкой 18, боковые стенки 19 и 20, шарнирно закрепленные на днище ковша 17 с возможностью поворота относительно осей 21 и 22, закрепления, составную заднюю стенку, состоящую из корпуса 23 задней стенки и расположенных внутри корпуса 23 выдвижных элементов 24 и 25, например, секторной формы (центральный угол равен, например, 60°, радиус - высоте корпуса задней стенки). Выдвижные элементы 24 и 25 шарнирно закреплены на днище ковша 17 и жестко соединены, например, под прямым углом, с задними кромками боковых стенок ковша 19 и 20, а также связаны со штоками 26 и 27 гидроцилиндров 28 и 29, расположенньпс внутри корпуса задней стенке ковша 23 и шарнирно закрепленных на оси 30. На корпусе задней стенки ковша имеются проушины 31 - для крепления ковша к
рукояти и проушины 32 - для крепления гидроцилиндра поворота ковша.
Устройство управления механизмом поворота боковых стенок ковша (фиг.4) содержит датчик 13, установленный, например, на режущей кромке ковша, усилитель 14 поступающего от датчика сигнала, нелинейный преобразователь 15 и гидрозолотник 16.
Рабочая характеристика нелинейного преобразователя 15 соответствует зависимости угла естественного- откоса горной массы в забое (и, еле - довательно, требуемого угла наклона боковых стенок ковша с/) от удельного сопротивления копанию (Kp ) (фиг.8).
Данная зависимость может быть получена на основе экспериментальных данных с учетом наличия между различными физико-механическими свойствами взорванной горной массы определенной взаимосвязи: в частности, угол естественного откоса горной массы о(у может быть выражен в виде функции коэффициента ее разрыхления К р (Kp),.c другой стороны, существует функциональная взаимосвязь между величинами КрИ Кр, Совместное рассмотрение зависимостей o(,f (Кр) и (Kp) позволяет получить взаимосвязь, (Кр) , которая и соответствует рабочей характеристике нелинейного преобразователя 15.
Устройство по второму варианту ковша работает следующим образом.
Для отработки взорванного блока горизонтальными или наклонными слоями рукоять гидроцилиндром ее поворота устанавливается в горизонтальное или наклонное положение. С помощью гидроцилиндра напора осуществляется рабочий ход ковша на величину, доста10
15
При послойной выемке горной массы с различными физико-механическими свойствами удельное сопротивление копанию фиксируется датчиком 13, установленным, например, на режущей кромке ковша. Сигнал от датчика 13 через усилитель 14 поступает на нелинейный преобразователь 15, который в соответствии со своей рабочей характеристикой вырабатывает управляющий сигнал, поступающий на гидрозолотники 16, регулирующие работу гидг оцилиндров 28 и-29.
Выдвижением штоков 26 и 27 гидроцилин дров 28 и 29 и поворотом относительно осей 21 и 22 секторных элементов 24 и 25 изменяют конфигурацию задней стен1 и ковша и обеспечивают угол наклона боковых стенок ковша 15 и 20 к днищу 17 равным углу естественного откоса разрабатываемой горной массы.
Применение ковша предлагаемой конструкции с системой автоматического 25 управления его параметрами обеспечивает гибкое их соответствие условиям разработки и вследствие этого позволяет повысить эффективность экска- . ваторной выемки пород с различными физико-механическими свойствами.
20
30
35
40
Формула изобретен ия
Устройство управления ковшом экскаватора переменной емкости, содержащее гидрозолотник, выход которого подключен к гидроцилиндру механизма перемещения боковых стенок ковша, отличающееся тем, что, с целью расширения технологических возможностей, устройство снабжено нелинейным преобразователем, усилителем и датчиком усилий, развиваемых на режущей кромке ковша, выход кото- точную для его наполнения, по оконча- g рого через усилитель подключен к НИИ рабочего хода производится пово- входу нелинейного преобразователя,
выход которого подключен к входу гидрозолотника.
рот ковша гидроцилиндром вокруг шарнира.
При послойной выемке горной массы с различными физико-механическими свойствами удельное сопротивление копанию фиксируется датчиком 13, установленным, например, на режущей кромке ковша. Сигнал от датчика 13 через усилитель 14 поступает на нелинейный преобразователь 15, который в соответствии со своей рабочей характеристикой вырабатывает управляющий сигнал, поступающий на гидрозолотники 16, регулирующие работу гидг оцилиндров 28 и-29.
Выдвижением штоков 26 и 27 гидроцилиндров 28 и 29 и поворотом относительно осей 21 и 22 секторных элементов 24 и 25 изменяют конфигурацию задней стен1 и ковша и обеспечивают угол наклона боковых стенок ковша 15 и 20 к днищу 17 равным углу естественного откоса разрабатываемой горной массы.
Применение ковша предлагаемой конструкции с системой автоматического управления его параметрами обеспечивает гибкое их соответствие условиям разработки и вследствие этого позволяет повысить эффективность экска- . ваторной выемки пород с различными физико-механическими свойствами.
Формула изобретен ия
Устройство управления ковшом экскаватора переменной емкости, содержащее гидрозолотник, выход которого подключен к гидроцилиндру механизма перемещения боковых стенок ковша, отличающееся тем, что, с целью расширения технологических возможностей, устройство снабжено неcf ue.f
фиг2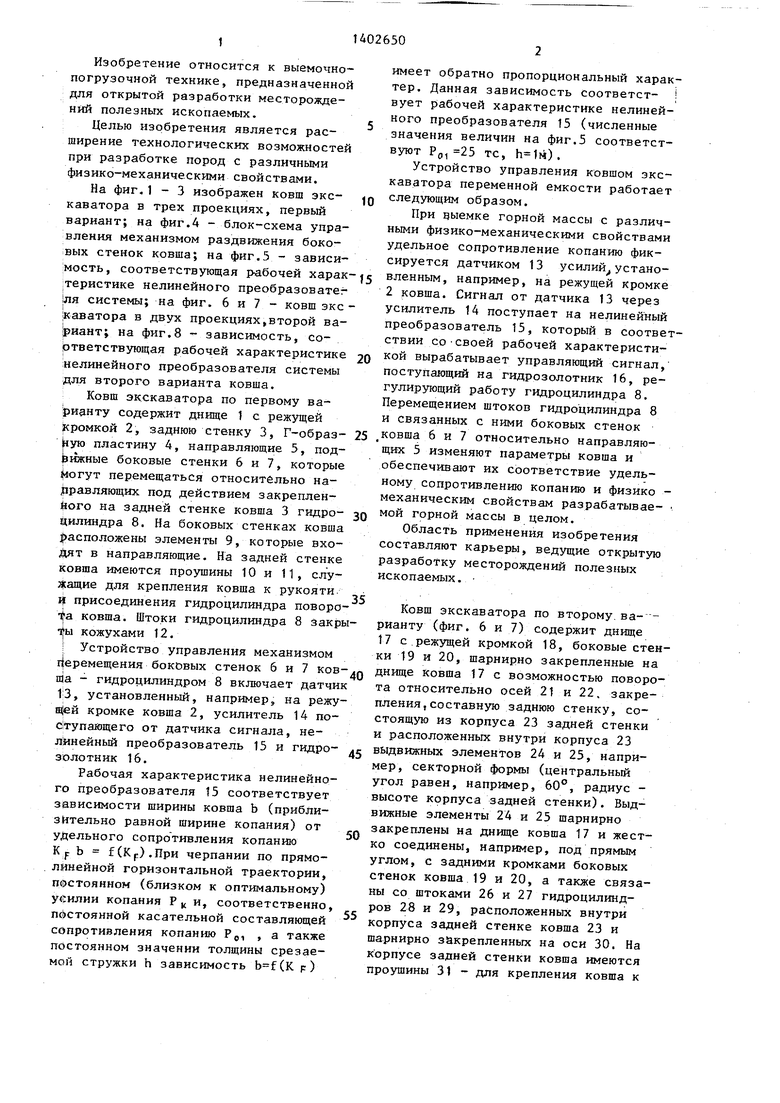
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗРАБОТКИ ТРАНШЕИ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ С РАБОЧИМ ОБОРУДОВАНИЕМ "ОБРАТНАЯ ЛОПАТА" И ОДНОКОВШОВЫЙ ЭКСКАВАТОР В.И.ЛИСИВЕНКО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU1828155C |
| Рабочее оборудование экскаватора-драглайна | 1987 |
|
SU1469034A1 |
| КОВШ ЭКСКАВАТОРА-ДРАГЛАЙНА | 1993 |
|
RU2078877C1 |
| Рабочее оборудование гидравлического экскаватора | 1990 |
|
SU1738928A1 |
| Ковш экскаватора-драглайна | 1980 |
|
SU889801A1 |
| Рабочее оборудование гидравлического экскаватора | 1985 |
|
SU1328435A1 |
| Ковш экскаватора | 1980 |
|
SU941478A1 |
| КОВШ КАРЬЕРНОГО ЭКСКАВАТОРА | 2015 |
|
RU2612766C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА-ДРАГЛАЙНА | 1992 |
|
RU2015254C1 |
| "Ковш экскаватора с оборудованием "прямая лопата" | 1990 |
|
SU1792471A3 |
Изобретение относится к выемоч- но-погрузочной технике и предназначено для открытой разработки месторождений полезных ископаемых.Цель изобретения - расширение технологических возможностей. Устр-во содержит гидрозолотник 16, выход которого подключен к гидроцилиндру 8, механизм перемещения боковых стенок 6, 7 ковша. Устр-во имеет нелинейный преобразователь 15, датчик 13 усилий, развиваемых на режущей кромке ковша. Выход датчика через усилитель 14 подключен к входу преобразователя 15, связанного с гидрозолотником. С помощью гидроцилиндра 8 осуществляется рабочий ход ковша на величину, достаточную для его наполнения. При послойной выемке горной массы с различными физико-механическими свойствами удельное сопротивление копанию фиксируется датчиком 13, с него сигнал через усилитель 14 поступает на преобразователь 15. Последний вы- рабатывает управляющий сигнал, поступающий на гидрозолотник 16. Использование данного устр-ва поьышает эффективность выемки пород с различными физико-механическими свойствами. 8 ил. а m 1C а СП
срие.5
28 30
фиг. 7
фиг.6
25
22
27 Г7
| Рабочее оборудование гидравлического одноковшового экскаватора | 1979 |
|
SU897967A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| КОВШ ЭКСКАВАТОРА | 1972 |
|
SU435324A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
