/7
(Л
ю
|
(Г О5
N)
Изобретение относится к машинострое- |нию, а именно к средствам контроля зубча- гых колес, и является дополнительным к основному по авт. св. № 1232927.
Цель изобретения - расширение функ- циональных возможностей путем обеспечения контроля зубчатых колес различного диаметра.
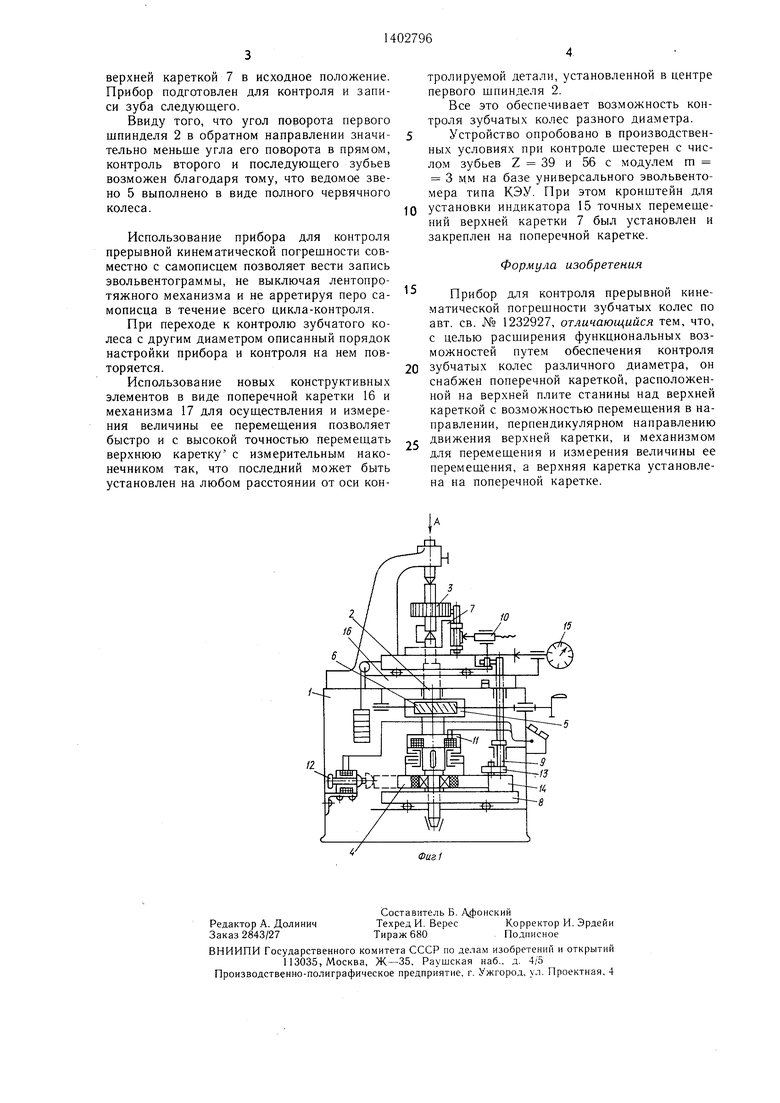
На фиг. 1 изображена конструктивная схема прибора для контроля прерывной кинематической погрешности зубчатых колес; на фиг. 2 - вид А на фиг. 1. ; Прибор для контроля прерывной кинема- гической погрешности включает станину 1, рервый шпиндель 2, расположенный в ста- Иине 1 и предназначенный для установки на Ьдном из его концов контролируемого зубчатого колеса 3, эвольвентный кулак 4, ус- гановленный на втором конце первого шпинделя 2, ведомое звено первого шпинделя 2, едомое звено 5 первого шпинделя 2, жест- JKO закрепленное на нем, ведуш.ее звено 6 первого шпинделя 2, установленное на станине 1 и кинематически связанное с ведомым звеном 5, верхнюю каретку 7 и нижнюю каретку 8, расположенную на нижней плите станины 1 и кинематически связанную с про- фильной стороной эвольвентного кулака 4, второй шпиндель 9, расположенный параллельно первому шпинделю 2 и связанный с верхней и нижней каретками 7 и 8, индуктивный датчик 10 перемещений, установленный на верхней каретке 7, электромагнитную муфту 11, одна половина которой связана с первым шпинделем 2, а другая - с эвольвентным кулаком 4, электромагнитный упор 12, расположенный с тыльной сторо- |ны эвольвентного кулака 4, причем послед- |ний установлен на первом шпинделе 2 с воз- можностью поворота вокруг его оси, а ве- )домое звено 5 первого шпинделя 2 выполнено |В виде полного червячного колеса, ролик 13 ;и планку 14, закрепленные на нижней каретке, индикатор 15, связанный с верхней :кареткой 7, поперечную каретку 16, расположенную на верхней плите станины 1 над верхней кареткой 7 с возможностью переме- шения в направлении, перпендикулярном направлению движения верхней каретки 7, и механизмом 17 для перемещения и измерения величины ее перемеш.ения, а верхняя каретка 7 установлена на поперечной каретке 16.
Прибор работает следующим образом.
Прибор настраивается по номинальной величине основной окружности контролируемого колеса 3. Для этого устройством 18 перемещают поперечную каретку 16 так, чтобы кончик измерительного наконечника отстоял от оси первого шпинделя 2 на величи- ну, равную радиусу основной окружности контролируемого колеса. Причем контактная поверхность измерительного наконечника
5 5 5 5
0 е
0
при нормальном натяге между измерительным рычагом и индуктивным датчиком 10 при настройке находится в плоскости, параллельной направлению движения поперечной каретки и проходяшей через ось первого шпинделя 2. Колесо 3 устанавливают в центре прибора и соединяют с первым шпинделем 2 поводковым устройством. При включенном питании прибора измерительная система прибора устанавливается в исходное положение. Предварительно включается электром агнитная муфта 11, а электромагнитный упор выключается. Измерительный наконечник вводится в зацепление с первым зубом в начальную точку эвольвенты так, чтобы перо установилось посредине бумажной ленты (не показана). После этого проверяют профиль первого зуба колеса на всей длине эвольвентного участка.
В процессе контроля контролируемому колесу 3 сообщают вращательное движение, верхней каретке 7 - образцовое движение через электромагнитную муфту 11, эвольвентный кулак 4, планку 14, ролик 13 и второй шпиндель 9. Величина перемещения верхней каретки 7 контролируется по индикатору 15. В момент достижения верхней кареткой 7 заданного положения (после схода измерительного наконечника с зуба) вращение первого шпинделя 2 прекращается. Контроль первого зуба закончен. Далее подготавливают измерительную систему для контроля следующего зуба. Выключают электромагнитную муфту 11 при одновременном включении электромагнитного упора 12. В этом случае эвольвентный кулак разъединяется с первым шпинделем 2, а электромагнитный упор 12 становится в рабочее положение.
В силу того, что червячная передача является самотормозящейся системой, первый щпиндель 2 с контролируемым колесом 3 остаются неподвижными. Верхняя каретка 7 начинает двигаться назад и через второй шпиндель 9, ролик 13 и планку 14 вращает эвольвентный кулак 4 относительно первого шпинделя 2 в обратном направлении до соприкосновения тыльной стороны эвольвентного кулака 4 с электромагнитным упором 12. Последний установлен так, что в своем рабочем положении он останавливает эвольвентный кулак 4 в позиции, которая соответствует прохождению верхней каретки 7 назад на величину шага зацепления. После отвода верхней каретки 7 на величину шага зацепления включают электромагнитную муфту 11 и выключают электромагнитный упор 12. В этом случае измерительная система прибора соединяется с первым шпинделем 2, а электромагнитный упор 12 отходи т от эвольвентного кулака 4. Врашением червяка червячной передачи в обратном направлении возвращают первый щпиндель 2 с
верхней кареткой 7 в исходное положение. Прибор подготовлен для контроля и записи зуба следующего.
Ввиду того, что угол поворота первого шпинделя 2 в обратном направлении значительно меньше угла его поворота в прямом, контроль второго и последующего зубьев возможен благодаря тому, что ведомое звено 5 выполнено в виде полного червячного колеса.
Использование прибора для контроля прерывной кинематической погрешности совместно с самописцем позволяет вести запись эвольвентограммы, не выключая лентопротяжного механизма и не арретируя перо самописца в течение всего цикла-контроля.
При переходе к контролю зубчатого колеса с другим диаметром описанный порядок настройки прибора и контроля на нем повторяется.
Использование новых конструктивных элементов в виде поперечной каретки 16 и механизма 17 для осушествления и измерения величины ее перемещения позволяет быстро и с высокой точностью перемещать верхнюю каретку с измерительным наконечником так, что последний может быть установлен на любом расстоянии от оси контролируемой детали, установленной в центре первого шпинделя 2.
Все это обеспечивает возможность контроля зубчатых колес разного диаметра.
Устройство опробовано в производственных условиях при контроле шестерен с числом зубьев Z 39 и 56 с модулем m 3 MM на базе универсального эвольвенто- мера типа КЭУ. При этом кронштейн для
установки индикатора 15 точных перемещений верхней каретки 7 был установлен и закреплен на поперечной каретке.
Формула изобретения
Прибор для контроля прерывной кинематической погрешности зубчатых колес по авт. св. № 1232927, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения контроля зубчатых колес различного диаметра, он снабжен поперечной кареткой, расположенной на верхней плите станины над верхней кареткой с возможностью перемещения в направлении, перпендикулярном направлению движения верхней каретки, и механизмом для перемещения и измерения величины ее перемещения, а верхняя каретка установлена на поперечной каретке.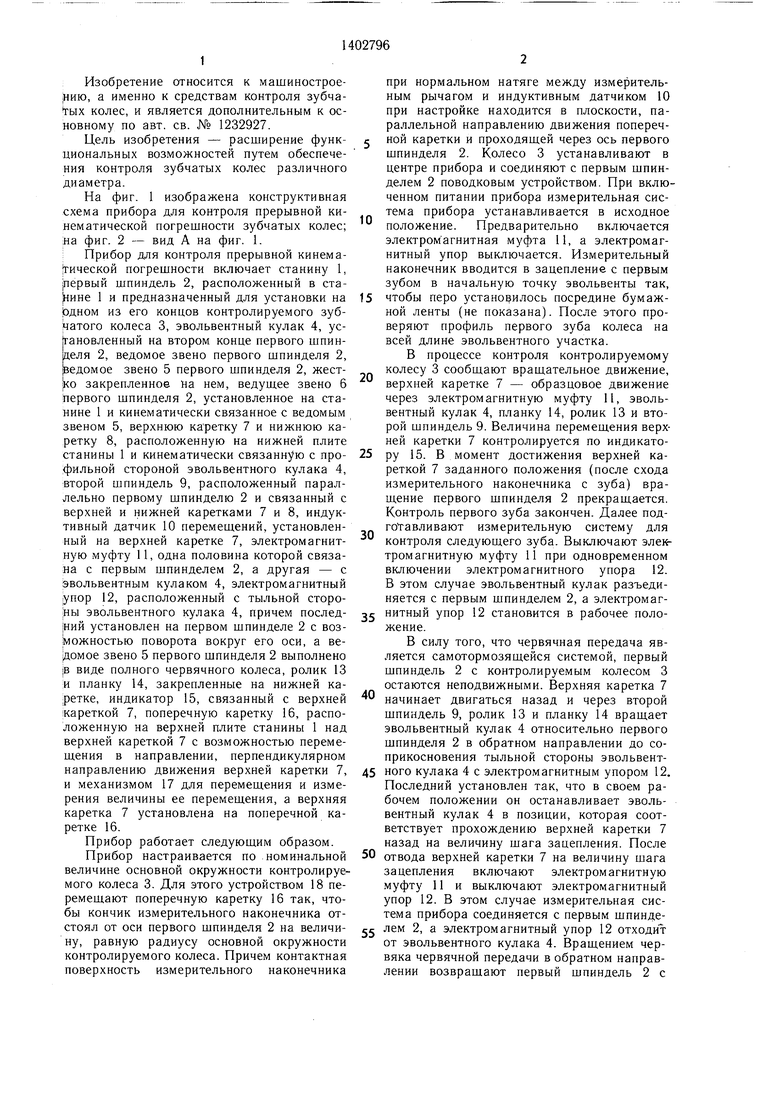
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для контроля прерывной кинематической погрешности зубчатых колес | 1984 |
|
SU1232927A1 |
| Устройство для определения прерывной кинематической погрешности зубчатых колес | 1980 |
|
SU926526A1 |
| Способ определения прерывной кинематической погрешности зубчатых колес | 1976 |
|
SU599154A1 |
| Устройство для контроля погрешностей профиля зуба конических колес | 1975 |
|
SU579533A1 |
| Станок для обработки кольцевого желоба переменного профиля | 1988 |
|
SU1645108A1 |
| Устройство для поэлементного контроля зубчатых колес | 1980 |
|
SU1242705A1 |
| Устройство для определения прерывной кинематической погрешности зубчатых колес | 1980 |
|
SU898833A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ ЭВОЛЬВЕНТНОГО ПРОФИЛЯ ЗУБЧАТОГО КОЛЕСА | 1970 |
|
SU266232A1 |
| Устройство для замера линейной координаты продольной линии зуба | 1983 |
|
SU1089391A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ АРОЧНЫХ ЗУБЬЕВ ЗУБЧАТЫХ КОЛЕС | 1994 |
|
RU2074794C1 |
Изобретение относится к машиностроению, а именно к средствам контроля кинематической погрешности зубчатых колес. Цель изобретения - расширение функциональных возможностей путем обеспечения контроля зубчатых колес различного диаметра. Это достигается тем, что продольная каретка 7 расположена на поперечной каретке 16. При изменении диаметра контролируемого колеса 3 механизмом 17 для пе- ремеш,ения и измерения величины перемещения каретка 16 перемещается на расчетное расстояние в соответствии с р адиусом начальной окружности контролируемого колеса. 2 ил.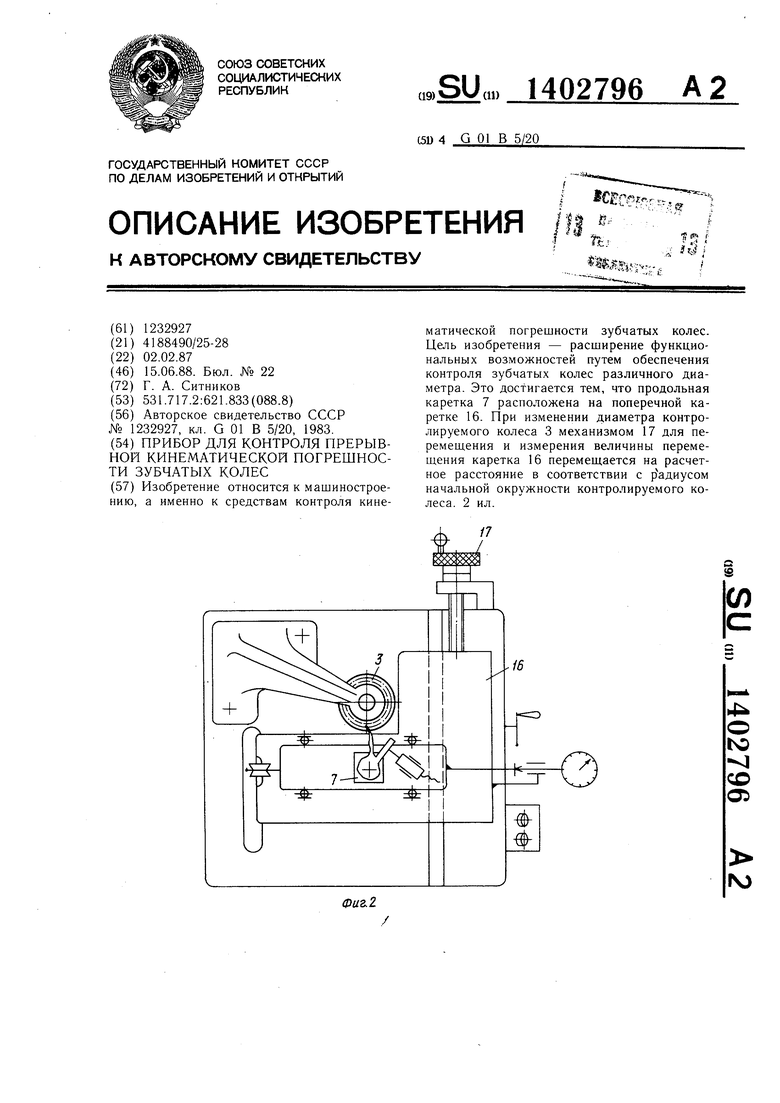
| Прибор для контроля прерывной кинематической погрешности зубчатых колес | 1984 |
|
SU1232927A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
